弹载雷达红外复合系统信息融合算法研究
2016-12-05齐恩勇
齐恩勇
(中国空空导弹研究院 河南 洛阳471099)
弹载雷达红外复合系统信息融合算法研究
齐恩勇
(中国空空导弹研究院 河南 洛阳471099)
基于对日益复杂的战场电磁环境的适应性以及提高目标探测跟踪能力的目的,本文分析了弹载雷达红外复合系统的技术优势,着重研究了作为雷达红外复合系统技术关键的信息融合处理算法,采用数据关联融合检测和多传感器概率关联跟踪滤波算法,确保雷达红外复合系统在杂波环境下的检测关联正确率和目标跟踪精度,通过仿真验证表明该融合跟踪滤波算法能够满足高精度制导的信息需求、有利于提高对目标的跟踪性能。
雷达红外复合;信息融合;融合检测;目标跟踪
随着技术的不断发展,导弹武器系统面临着越来越严酷的复杂战场电磁环境,特别针对隐身飞机、新型干扰设备以及低空小目标对抗的军事需求,对于导弹武器的反隐身、抗干扰以及多目标分辨能力等性能提出了更高的要求。由于单一制导方式的固有局限性,在复杂战场环境下制导性能面临日益严重的挑战,难以满足现代高技术战争的需求。有效改进末制导系统在目标探测以及复杂电磁环境下的作战能力,对于空战武器的发展具有重要意义。多模复合制导可以充分发挥各制导方式的优势,互相弥补不足,使精确制导系统能适应不断恶化的战场环境和目标的变化,保证导引系统具有强大的目标综合探测性能,提高系统的抗干扰能力和作战效能[1]。雷达/红外复合制导模式能够较好满足未来空战对导引系统的要求,通过对雷达、红外传感器获取信息进行融合处理,提高对复杂的战场环境和恶劣的气象条件的适应能力,从而提高导引系统反隐身、抗干扰以及综合探测性能[2-3]。雷达/红外复合制导被认为是最有发展前途的复合制导技术,也是提高精确制导系统性能的关键技术途径,已成为世界各国研究的热点,在空空、空地等多种应用领域开展了大量的样机研制和相关技术研究。
雷达/红外复合寻的制导是一种新型的制导技术,它实质上是多传感器数据融合技术在精确制导武器系统中的应用。文中从分析雷达/红外复合制导模式的技术优势入手,着重论述这种复合制导模式发挥作用的技术关键即目标融合检测和融合跟踪算法,并通过仿真验证目标融合跟踪的效果,能够满足高精度制导的信息需求。
1 雷达/红外复合系统的技术分析
雷达/红外复合制导模式的优势表现在制导方式互补,制导精度高;具有很好的反隐身目标和抗干扰能力;可适应全天候、全高度和全向攻击的使用要求[2]。雷达/红外复合制导系统中,雷达作为主动传感器,能从目标回波中提取距离和速度等多种信息,且可实现发射后不管,全天候能力强。但是,雷达工作时要辐射大功率电磁波,容易遭受电子干扰和反辐射导弹的攻击。而红外传感器属于被动传感器,其主要通过接收目标辐射的热能进行探测和定位,具有测角精度高和目标识别能力强的特点,已经作为重要的被动探测手段,但其主要缺点是不能提供目标的距离信息和全天候能力较差。将雷达制导与红外制导结合能实现制导方式的互补,进一步提高综合探测能力和抗干扰能力。远距离时,根据雷达获得的信息来引导红外制导系统跟踪目标,使目标落在红外制导系统的视角内,当接近目标时红外制导系统识别和跟踪目标,以弥补红外制导作用距离近的不足,发挥红外传感器在接近目标时跟踪精度高的优势[3-5]。
双模复合系统的关键技术是解决两种体制信息的融合,进行双模制导方式下的目标探测、搜索、截获和跟踪算法以及制导信息融合处理。复合模式的两种探测系统及其信息处理分系统并行工作,分别在各自的视场内开展目标检测识别,根据信息融合的功能模型,在不同的融合层次采用相应融合处理算法,将雷达和红外传感器在空间和时间上的互补和冗余信息,依据优化准则组合起来,产生对观测环境的一致性解释和描述[6]。信息融合处理是提高复合导引系统目标跟踪综合性能与抗干扰性能的技术关键。
为了实现雷达和红外数据信息融合,雷达和红外各自形成目标的局部航迹并传送到融合中心,融合中心对雷达和红外形成的局部航迹进行融合得到融合中心的航迹,然后再把融合中心预测状态及其协方差阵反馈到雷达和红外传感器作为雷达和红外的预测状态及其协方差。在实际系统中,雷达和红外一般是不同步的,因而先进行时间对准,把时间对准技术和雷达-红外航迹融合方法相结合。信息融合技术按照信息或融合数据的加工程度,可以分为数据层、特征层及决策层3个融合层次[7]。雷达和红外各自信息处理单元给出对目标的检测、跟踪结果,分别送到信息融合处理单元,由其按照相应的融合策略对收到的结果进行融合、识别并跟踪目标[8]。图 1为雷达/红外复合导引系统信息融合原理示意图。
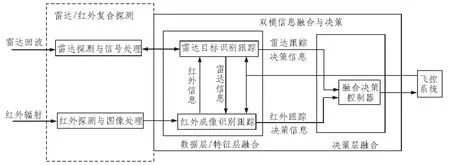
图1 雷达/红外双模系统信息融合原理图
根据图1,雷达/红外双模导引系统由复合探测以及信息融合与决策构成。雷达探测部分接收处理雷达回波信号,进行目标识别和目标距离、速度及角度信息的提取。来自目标的红外辐射信号经由相应的探测通道接收,进行红外信息处理、识别并截获目标,控制俯仰和旋转伺服跟踪,并计算和输出制导信号。信息融合与决策系统的雷达目标识别跟踪和红外识别跟踪共同完成数据层和特征层融合,融合的结果(雷达跟踪决策信息和红外跟踪决策信息)进一步送入融合决策控制器完成决策层融合,实现决策与判别。特征层融合的作用是利用一个探测通道目标识别和跟踪的特征信息来辅助另一个通道的目标识别和跟踪。决策层融合的作用为:迎头远距离时,根据雷达跟踪决策信息来引导红外传感器的伺服控制系统跟踪目标,使目标落在红外传感器的视角内,以便红外传感器能识别和跟踪目标,从而能弥补红外传感器作用距离近的不足,发挥红外传感器在接近目标时跟踪决策信息精度高的优势[4,8]。在目标跟踪过程中,信息融合系统自动分析和判断雷达与红外获得信息的品质,并自适应地确定同时利用两个通道的信息还是选择某一个通道的信息进行制导,从而使复合制导发挥出最大的效能。
2 雷达/红外信息融合处理算法及其仿真分析
雷达/红外复合导引系统的技术关键在于两种探测信息的融合处理。雷达和红外数据融合作为典型的异类传感器数据融合[5],能够实现信息互补,增强对目标的探测性能,改善对目标的跟踪以及提高系统的生存能力。在多传感器信息融合系统中,各传感器测量信息一般具有不同的数据率和测量坐标系,而测量信息关联判决和航迹融合需要同一测量坐标系内、同一时刻的目标状态估计,因此为了进行雷达和红外两种传感器信息的有效融合,必须对两个传感器测量信息进行时间配准和空间校准[3,7]。
所谓时间配准,即将同一目标的各传感器的不同步的测量信息同步到同一时刻。雷达和红外分系统测量信息周期具有一定的差异,向融合系统提供的目标测量信息是不同步的,所以在进行融合之前,必须把这些数据配准到相同的时刻。一般情况下,对信号周期长的在时间上可采用线性外推法或信号重构法;线性外推法是一种简易方法,信号重构法精度相对较高。为了实现目标测量信息的空间校准,雷达和红外分系统获得的目标测量信息需要经过坐标平移变换或旋转变换,将目标测量信息统一到同一坐标下,实现这两种传感器测量信息的空间校准,以确保进行有效的数据关联融合。
雷达红外融合检测是双模导引系统信息融合处理的基础,融合检测系统主要针对雷达和红外传感器的检测结果进行逻辑判断,确保后续的融合跟踪和抗干扰处理发挥作用。融合跟踪系统主要针对跟踪状态下雷达和红外测量数据进行关联,找到感兴趣的目标,同时对目标状态信息进行滤波,以消除测量误差、杂波和干扰的影响[9]。
基于数据关联融合检测算法是一种直接利用两种传感器检测结果进行融合的算法,可以应用于异质异类的分布式传感器。在雷达/红外复合模式中采用数据关联融合检测算法,直接对雷达和红外的检测结果进行融合,根据融合检测逻辑,确定融合检测结果,在保证检测概率的前提下降低虚警率[2-4]。
假设在某一时刻雷达测量得到Na个检测信号,得到相应的信号测量信息,即在各信号真实信息上叠加了量测噪声,假定该量测噪声相互独立,且服从均值为零的正态分布。红外分系统测量得到Np个检测信号,其对应的测量信息也是在真实信息上叠加了相互独立且服从均值为零的正态分布的量测噪声。假设某时刻的各检测信号由一个真实目标和若干杂波组成。由于雷达和红外传感器的结构和检测机理不同,且杂波在空间上分布是随机的,两个传感器在同一时刻得到杂波点的分布一般是不同的,而目标点则相对稳定。这正是基于数据关联融合检测算法的实际信息基础。同一时刻雷达和红外传感器对目标产生的测量信号,其方位角量测值θm和俯仰角量测值φm都是服从均值为θ和φ,方差为σ2θ和σ2φ的正态分布,雷达测量信息的上下标为、α红外测量信息的上下标为p,因此得到
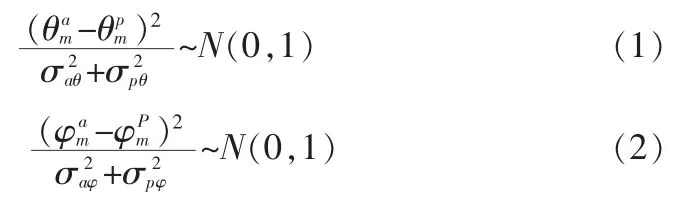
由式(1)和(2),可以得到:

式(3)表明由雷达和红外传感器对目标的测量信息经过一定的变换服从自由度为2的卡方分布,其中α表示卡方分布的分位点。而针对杂波产生的测量信号,由于其随机性,虽然由两个传感器得到的角度测量值也服从正态分布,但不同的杂波点均值一般情况下是不一样的,所以即使做同样的变换,也不能服从式(3)的卡方分布。这样,就可以把两个传感器得到的测量信号分为两类:分别是针对目标和杂波的测量信号,它们服从不同的联合分布。根据这种分布的不同,从而实现对雷达和红外传感器得到的测量信息的融合检测处理。该融合检测算法的优势在于不用考虑各分系统检测器的检测过程和算法,只需考虑各自最终输出,可以方便地应用到雷达和红外这样异类传感器的融合检测中。
雷达/红外融合跟踪对于提高目标跟踪精度具有至关重要的意义[4,10,11]。融合跟踪算法是对检测结果的进一步优化,并在此基础上对目标位置作出预测。一方面,融合跟踪算法对雷达和红外传感器的测量结果进行优化,提供对目标状态的更精确地估计,另一方面解决雷达和红外对观测的目标身份关联问题。因此融合跟踪算法的性能将直接影响导弹制导精度。
概率数据互联滤波算法(Probability Data Association Filter,PDAF)是一种基于标准卡尔曼滤波器修改的跟踪滤波器[7,10],该算法考虑了落入相关波门内的所有候选回波,并根据不同的相关情况计算出各个回波来自目标的概率,然后利用这些概率值对相关波门内不同回波进行加权,形成候选回波的等效回波,即利用关联概率将所有测量联系在一起,形成一个综合测量,用等效回波来对目标的状态进行更新。概率数据互联算法主要用于解决杂波环境下的多传感器单目标跟踪问题。如果落入相关波门内的回波多于一个,这些回波中只有一个来自于目标,其余由虚警或者杂波产生。利用概率互联算法对杂波环境中的单目标进行跟踪,使得错误跟踪和丢失目标的概率较小。该算法采用波门内观测数据全加权策略,以减小错误关联带来的影响。PDAF算法应用于雷达和红外复合系统,相应利用多传感器概率关联滤波算法(Multi-sensor PDAF,MSPDAF),实现雷达和红外融合跟踪滤波,使雷达和红外复合系统适用于杂波环境下的目标检测跟踪[6]。
下面描述多传感器概率关联滤波(MSPDAF)算法原理[3,6,12]。弹目相对运动状态方程表示为

G(k)为过程噪声分布矩阵;V(k)为高斯型过程噪声。
雷达观测方程和红外观测方程分别表示为:
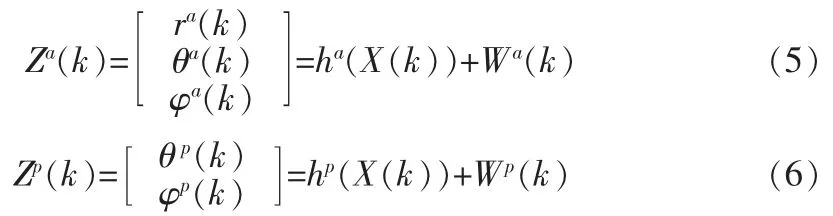
其中,
Wa(k)为雷达观测噪声,Wp(k)为红外观测噪声。
雷达观测噪声和红外观测噪声均为零均值高斯白噪声,且相互独立。雷达和红外的观测方差矩阵分别为Ra=diag(,,)和Rp=diag(,)。
设传感器i(i=a(雷达),p(红外),下同)在k时刻跟踪波门内共有mi(k)个回波(k),j=1,2,…,mi(k),对应的观测集合为;第i个传感器到k时刻的累积观测量集合为。
因此基于第i个传感器测量的最小方差无偏估计为


其中,

其中,Pi(k|k-1)为传感器i的一步预测协方差阵。因此,得到滤波值为:

通过以上处理,可以得到雷达观测和红外观测的PDAF估计。然后通过方差融合规则对滤波结果进行航迹融合处理得到目标状态的融合估计,表示为:

上述雷达/红外测量数据的滤波处理算法流程描述如下[6,13,14]:
S3,利用跟踪波门内确认的观测对雷达观测进行状态估计,得到(k|k)和协方差阵Pa(k|k);
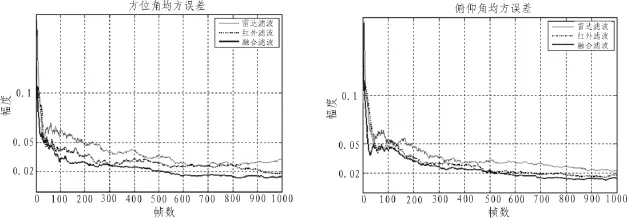
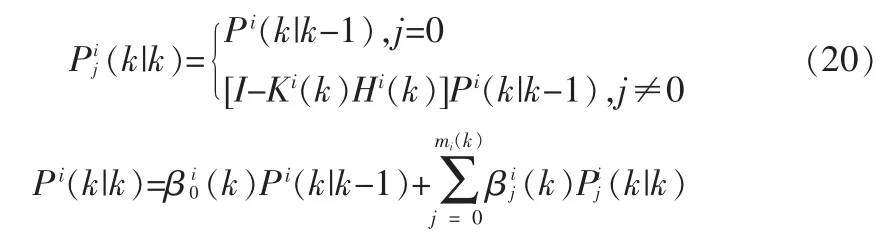
图2 融合跟踪滤波仿真输出的方位角和俯仰角均方误差
S7,保存雷达与红外融合后的目标状态,得到融合跟踪后的目标状态估计及其协方差阵P(k|k)=Pp(k|k)。
重复上述步骤,以实现对目标跟踪过程中目标状态的连续估计。基于MSPDAF的雷达红外融合算法采用的是波门内观测全加权技术,对于在杂波环境下的目标检测和跟踪,该方法具有较高的关联正确率和跟踪精度[6,14,15]。对上述融合跟踪滤波算法进行了仿真验证,图2为仿真输出的方位角、俯仰角均方误差曲线,仿真结果表明,相对雷达或红外单传感器系统,融合后的角度均方误差较雷达和红外单模滤波时都有所减小,说明该融合算法的有效性的。雷达和红外双模融合跟踪滤波能够实现跟踪精度高、均方误差小,有利于对目标的稳定跟踪。
3 结 论
雷达/红外复合制导模式能够发挥各制导方式的优势,弥补各自的不足,使精确制导系统适应复杂的战场电磁环境和目标的变化,有利于提高导引系统对目标的综合探测性能和跟踪精度。雷达和红外复合制导系统的技术关键是雷达和红外传感器获取信息的融合处理,实施对目标的融合检测和融合跟踪,以达到双模系统的目标检测和跟踪优势。雷达红外融合检测是该双模复合系统信息融合处理的基础,采用数据关联融合检测算法,直接对雷达和红外的检测结果进行融合,能够在保证检测概率的前提下降低虚警率。雷达/红外融合跟踪技术对于提高目标跟踪精度具有至关重要的作用,融合跟踪算法是对检测结果的进一步优化;融合跟踪处理主要针对跟踪状态下雷达和红外测量数据进行关联,并对目标状态信息进行滤波。雷达和红外融合跟踪采用多传感器概率关联滤波算法,将预测波门内的量测信息按照概率进行全加权,使雷达红外双模复合系统适用于杂波环境下的目标检测跟踪,达到较高的关联正确率和跟踪精度。仿真结果验证了该融合算法的有效性。雷达和红外双模融合跟踪滤波能够实现跟踪精度高、均方误差小,有利于提高对目标的跟踪性能。在融合处理算法基础上,需要继续挖掘雷达红外双模复合系统的潜力,更好地发挥雷达红外复合系统的技术效能。
[1]袁小虎,胡云安,主编.导弹制导原理[M].北京:兵器工业出版社,2009.
[2]卢大威,高彦钊,晏行伟,等.基于角度观测关联对的NNEKF红外/毫米波融合跟踪算法 [J].弹箭与制导学报,2011,31(5):4-8.
[3]殷艳华,王学伟.雷达/红外成像复合制导信息融合技术[J].红外与激光工程,2009,28(3):548-552.
[4]倪龙强,高杜生,孟祥欣,等.一种红外与雷达信息融合跟踪算法及其性能分析[J].火箭发射与控制学报,2014,35 (4):44-48.
[5]王越,周德云,杨维,等.多种异类传感器联合跟踪的异步航迹融合算法[J].弹箭与制导学报,2014,34(2):153-156.
[6]何友,王国宏 等著.多传感器信息融合及应用[M].2版.北京:电子工业出版社,2007.
[7]石章松,刘忠.目标跟踪与数据融合理论及方法[M].北京:国防工业出版社,2010.
[8]谢泽峰,高宏峰,任亚飞.基于UKF的雷达/红外分布式加权融合算法[J].导弹与航天运载技术,2013,326(3):59-62.
[9]秦彦源,敬忠良,雷明.多传感器目标检测跟踪与分类算法[J].计算机仿真,2014,31(9):364-368.
[10]夏佩伦.目标跟踪与信息融合[M].北京:国防工业出版社,2010.
[11]李相平,王光复,谢志敏.毫米波/红外复合制导目标融合跟踪算法[J].制导与引信,2010,31(1):9-13.
[12]王永安,何光进,刘毅.基于卡尔曼滤波的多传感器跟踪融合算法[J].船电技术,2013,33(2):4-7.
[13]崔彦凯,梁晓庚.杂波环境下雷达/红外融合跟踪的修正概率数据互联滤波算法 [J].计算机工程与科学,2013,35 (12):185-190.
[14]张锐,胡国平.一种基于IMM/MSPDAF的多传感器数据融合目标跟踪算法[J].现代防御技术,2010,38(6):123-127.
[15]张翊安,刘世前,敬忠良,等.雷达和红外融合对高机动目标跟踪仿真研究[J].计算机仿真,2011,28(10):23-27.
Research on information fusion algorithm for missile-borne radar and IR composite system
QI En-yong
(China Airborne Missile Academy,Luoyang 471099,China)
On account of the adaptability to the increasingly complicated electromagnetic environment and the intention of improving ability for target detection and tracking,this paper analyses the technical superiority of missile-borne radar and IR composite system.The information fusion algorithms known as the technology key of the radar and IR composite system are presented emphatically.The fusing detection and tracking algorithms,data-relevancy fusing detection algorithm and multi-sensor probability data association filtering algorithm,ensure detection relevancy accuracy and target tracking precision in clutter surroundings for radar and IR composite system.By means of simulation analysis,it is indicated that the fusion tracking filter algorithms are capable of meeting with the information requirement of high-accuracy guidance and improving target tracking performance.
radar and IR composite;information fusion;fusing detect;target tracking
TN953+.5
A
1674-6236(2016)22-0175-05
2015-11-10稿件编号:201511089
齐恩勇(1966—),男,河北昌黎人,硕士,研究员。研究方向:嵌入式系统设计、信号与信息处理。