成屏面板坝三维变形控制网设计与观测
2016-12-02李最能濮久武
李最能,濮久武
(1.浙江遂昌成屏水力发电有限责任公司,浙江省遂昌市 323300;2.浙江华电乌溪江水力发电厂,浙江省衢州市 324000)
成屏面板坝三维变形控制网设计与观测
李最能1,濮久武2
(1.浙江遂昌成屏水力发电有限责任公司,浙江省遂昌市 323300;2.浙江华电乌溪江水力发电厂,浙江省衢州市 324000)
大坝变形监测控制网一般采用边角网和精密水准网用于水平位移监测控制网和垂直位移监测控制网。随着高精度全站仪的推广应用,中小型大坝水平及垂直位移监测控制网可采用简便可靠、高效先进的三维变形监测控制网,取代常规的边角网和精密水准网。成屏堆石坝及谢村源混凝土坝采用了三维变形监测控制网,并通过网型的优化设计及合理的现场观测方法,达到了预期目标。工程实践证明只要三维变形监测控制网设计合理,其应用于中小型水库大坝工程是切实可行的。
成屏面板坝;三维变形监测控制网
0 引言
大坝变形监测控制网包括水平位移监测控制网和垂直位移监测控制网。为确保大坝水平位移及垂直位移监测控制网最弱点指定方向位移量全中误差不超过±2.0mm,或在指定方向的平差值坐标中误差不超过±1.4mm。水平位移监测控制网一般通过边角网实施,垂直位移监测控制网一般通过精密水准网实施。精密水准网工作量大、布设要求高。随着高精度全站仪的推广应用,对于中小型工程,在边角网监测水平位移监测控制网的同时,在控制网测点中加测垂直角并进行对向观测,构成EDM三角高程网,与水平位移监测控制网共同组成三维变形监测控制网,从而取代常规的边角网和精密水准网。
1 混凝土坝及土石坝三维变形监测控制网设计原则
按《混凝土坝安全监测技术规范》(SL 601—2013)[1]及《土石坝安全监测技术规范》(SL 551—2012)[2]规定结合工程实际,三维变形控制网的布设应遵循以下原则:
(1)控制网中应确保有2个以上稳定可靠的基准点,由这些基准点与各工作基点及过渡点通过一定的通视图形构成变形控制网,基准点宜布设在大坝下游不受大坝及库水压力影响的地区。
(2)控制网设计应以网形结构简单及经济合理为原则,三角形的个数及布置范围,以能利用基准点校测坝区内工作基点为原则。测点不应设在有强电磁场影响的范围内,应避免视线接近水面,视线离建筑物的距离不宜小于2m。三角形网边长不宜过长,网点间垂直角不应超过30°,高差不宜过大。
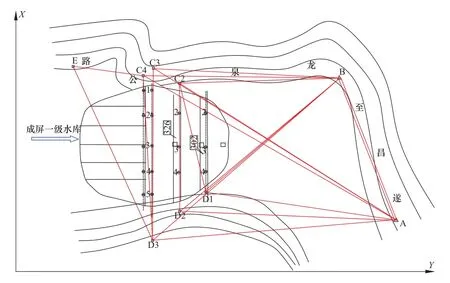
图1 成屏大坝三维变形控制网通视图
(3)控制网初步设计完成后,应根据观测方案采用模拟平差法计算,对精度、可靠性进行分析,并对设计方案进行优化调整。各观测量可靠性因子ri(多余观测分量,0≤ri≤1)值不宜小于0.2,如因条件限制,个别观测量不能满足此要求时,则应在观测中采取特殊措施,以排除测值含有粗差的可能性。
(4)按最小二乘法进行精度预估,测点在指定方向的位移量中误差不应大于±2.0mm。
2 三维变形监测控制网在成屏等大坝中应用
2.1 成屏面板堆石坝三维变形监测控制网
成屏混凝土面板堆石坝位于浙江省遂昌县境内,水库为中型水库。面板堆石坝最大坝高78.32m,坝顶长217.7m。控制网采用三维变形监测控制网,在大坝坝轴线下游400m以外山坡上设立2个稳定可靠的基准点A、B,与大坝附近的7个工作基点D1、C2、D2、C3、D3、C4、E等共计9个测点,组成三维变形监测控制网,见图1。
网点间最大边长(平距)为A-C4的533m,最小边长(平距)为C4-E的170m,加权平均边长(平距)325m。
2.1.1 现场观测
大坝变形控制网观测采用一等边角网法,并采用EDM三角高程进行对向观测,水平角、垂直角及边长均达到国家一等测量精度。成屏大坝三维控制网现场观测采用Leica TCA1201+全站仪,标称测角精度为1.0″、测距精度为1mm+1.5ppm×D。观测方法除遵守规范规定的原则及工程控制网设计方案规定外,尚遵守下述原则:
(1)变形监测控制网在不同时期观测宜使用同一台或同一类型仪器设备,并采用相同的观测方法。
(2)现场观测尽量选择空气能充分调和的有风天气,最好是在温度较均匀的阴天,这能显著提高观测精度。
(3)水平角采用方向观测法观测12测回,全部测回应在两个异午的时间段内各完成一半,每一时间段观测的基本测回数不超过总基本测回数的2/3。在全阴天,可适当变通。
(4)垂直角按中丝法观测测回,分别进行对向观测。对向观测两测站的垂直角应尽量在同时段或对称观测时段内进行,以中午附近大气垂直折光变化最小的时间段观测最为宜,取地方时10时至14时之间,一般情况下在10时至16时之间目标成像清晰时进行[3]。
(5)每条边对向观测,每单向边分上午、下午两个对称时段观测,每单向一个时段观测二测回,一测回读数四次。边长观测时首先将仪器设定为不进行气象改正(设置气象改正等于零),记录观测边长(斜距),再进行气象改正和常数改正计算(包括加常数、乘常数、周期误差、气象等改正)[4]。
斜边长用平差后的三角高程进行倾斜改正,倾斜改正后的边长投影至该测区平均高程面。
2.1.2 观测成果验算
成屏大坝三维变形监测控制网计算的所有12个三角形闭合差、2个四边形极条件闭合差、2个四边形(扇形)组合角闭合差以及所有三角形高差闭合差均满足限差要求。其中按菲列罗公式计算的测角中误差之限差。

图2 谢村源大坝三维变形控制网通视图
2.1.3 平差计算及精度评定
大坝三维变形监测控制网首期观测一般采用经典平差计算,平差时应确定一个起算点及一个起算方向。
变形监测控制网的复测平差计算,当无必要起算数据时,可采用秩亏自由网平差法;当有相对稳定点时,可采用拟稳平差;当能确定有两个以上稳定点或一个稳定点及一个起算方向时,应采用经典平差。
成屏大坝本期控制网观测为工程除险加固后首期观测,计算采用二基准点A、B作为已知三维坐标,按经典平差计算。平差结果表明0.33≤ri≤0.73,后验单位权中误差为±0.57″,与先验的±0.50″基本一致,说明网的可靠性及观测质量达到预期。三维控制网平差值坐标全中误差最大值MX、MY、MH分别在±1.14、±0.91、±0.66mm以内,各测点误差椭圆长半轴E在±1.22mm以内,每公里高差中数全中误差为±1.44mm。各网点三维坐标中误差均小于规范规定的±1.4mm技术要求,说明三维控制网的设计及监测完全满足规范要求。
2.2 谢村源混凝土双曲拱坝三维变形监测控制网
谢村源混凝土拱坝位于浙江省松阳县,水库为中型水库。最大坝高66m,坝顶弧长239m。设计考虑在大坝左、右拱端距大坝基左、基右分别约100、150m范围处岸坡山体上设立2处稳定可靠的基准点校左、校右。这样整个控制网由2个基准点校左、校右及3个工作基点基左、基右、基右-1组成,共计5个测点,见图2。其中基右-1主要为大坝正常观测时检测全站仪加常数用。为检核控制网中基准点及工作基点本身的稳定性,可将2个基准点及3个工作基点共5个测点联合进行自由网平差,以判明各基点的稳定性。控制网采用三维变形监测控制网。
网点间最大边长(平距)为校左—基右-1的283m,最小边长(平距)为校—基左的91m,加权平均边长(平距)206m。大坝变形控制网观测采用一等边角网法,并采用EDM三角高程进行对向观测,水平角、垂直角及边长均达到国家一等测量精度。
2.2.1 现场观测及观测成果验算
谢村源大坝三维控制网计算了5个独立的三角形。经计算得到的5个三角形闭合差、测角中误差、2个四边形极条件闭合差以及2个四边形组合角闭合差均满足限差要求。其中按菲列罗公式计算的测角中误差mβ=±0.50″<±0.7″之限差。
2.2.2 平差计算及精度评定
首期控制网计算采用基右(200.0000,200.0000,477.5971)为已知点α基右—基左=55°35′02.″81,为已知坐标方位角按经典平差计算。
平差结果表明0.31≤ri≤0.79,后验单位权中误差为±0.52″,与先验的±0.50″基本一致,说明网的可靠性及观测质量达到预期。
三维控制网平差值坐标中误差最大值MX、MY、MH分别在±0.46、±0.43、±0.48mm以内,各测点误差椭圆长半轴E在±0.49mm以内,每公里高差中数全中误差为±1.35mm。各网点三维坐标中误差远小于规范规定的±1.4mm技术要求,观测精度高于预期。
3 结论及建议
(1)三维变形监测控制网简便可靠、高效先进,只要控制网设计合理、观测规范、平差计算严密,应用于中小型水库大坝工程可满足规范规定的技术要求。但在控制网设计时必须进行各网点精度预估,以确保其三维坐标中误差全部满足规范要求。
(2)控制网观测应采用满足规范要求的Ⅰ等精度全站仪进行水平方向、垂直角及边长的观测,其中水平角宜采用方向观测法观测12测回以上;垂直角采用中丝法观测8测回以上;边长观测4测回以上并在测站和镜站分别测定气象元素。全部测回在两个异午时间段内分别完成。
(3)为保证垂直位移监测控制网最弱点精度,最弱点与起算点的距离不应超过1000m,且尽量布设多个中间过渡点以减小三角形边长;垂直角观测尽量做到在对称观测时段进行对向观测;仪器高量取时通过量取测墩底座面至全站仪电池槽下沿处的垂直距离等特定的措施提高仪器高及目标高的量测精度。
(4)三维变形监测控制网现场观测时在边长较短的测点间,为消除目标棱镜偏心差对水平方向观测值的影响,在保持棱镜基座和支架相对位置固定不动(使棱镜支架在基座中的位置不变)的情况下,在现场观测全测回的一半测回后将棱镜基座旋转180°重新安置棱镜,观测另一半测回。全部测回的观测均值能基本消除这种棱镜偏心误差对水平方向及距离观测值的影响[5]。
(5)在现场有相对稳定基线时,全站仪(测距仪)加常数及乘常数的检验可通过现场进行校测,并考虑全站仪(测距仪)加常数及乘常数修正的必要性和可靠性。
(6)三维变形监测控制网宜采用平面及高程三维坐标联合平差,以提高各网点坐标的可靠性。
[1] SL 601—2013 混凝土坝安全监测技术规范[S].北京:中国水利水电出版社,2013.
[2] SL 551—2012 土石坝安全监测技术规范[S].北京:中国水利水电出版社,2012.
[3] GB/T 17942—2000 国家三角测量规范[S]. 北京:中国标准出版社,2000.
[4] GB/T 16818—2008 中、短程光电测距规范[S]. 北京:中国标准出版社,2008.
[5] 陈斌,濮久武. 全站仪目标棱镜偏心差及其影响[J].水电自动化与大坝监测,2013(5):65-67.
李最能(1969—),男,浙江丽水人,工程师,从事水电站运行管理工作。E-mail:lzn418@163.com
濮久武(1964—),男,浙江丽水人,教授级高级工程师,研究方向:水工建筑物安全监测及管理。E-mail:pujw99@163.com
Design and Observation of Three Dimensional Deformation Control Network for Chengping Face Dam
LI Zuineng, PU Jiuwu
(1.Chengping Hydroelectric Power Co.Ltd. of Suichang Zhejiang;2.Zhejiang Huadian Wuxijiang Hydroelectric Power Plant,Quzhou 324000,China)
In the dam deformation monitoring control network,edge angle net and precision leveling network are generally used for the horizontal displacement monitoring and the vertical displacement monitoring control network. With the popularization and application of high precision total station, a simple, reliable, highly efficient and advanced 3D deformation monitoring and control network can be used to replace the conventional edge angle and precision level. The three dimensional deformation monitoring control network is adopted for Chengping rock fill dam and Xiecunyuan concrete dam of the dam. Engineering application practice proves that the design of the three dimensional deformation monitoring control network is reasonable, and it can be used in the medium and small reservoirs and dams.
Chengping face dam;three dimensional deformation control network