低地板有轨电车制动系统总体技术方案设计研究
2016-12-02杜凯军王斌儒吴志豪
杜凯军, 韩 龙, 王斌儒, 吴志豪
(中车青岛四方机车车辆股份有限公司, 山东青岛 266111)
低地板有轨电车制动系统总体技术方案设计研究
杜凯军, 韩 龙, 王斌儒, 吴志豪
(中车青岛四方机车车辆股份有限公司, 山东青岛 266111)
通过研究国内外低地板有轨电车制动系统集成技术及其实现方式,结合国内城轨车辆制动系统的研发及运营经验,提出了一套低地板有轨车制动系统方案。介绍了低地板制动系统的性能要求、功能组成,分析了制动系统工作原理,并对制动功能控制逻辑进行了设计。
有轨电车; 低地板; 制动系统
当今社会城市交通越来越拥挤,低地板有轨电车可以大大缓解交通压力,而且低地板有轨电车具有建设周期短、成本低等优点,越来越受到各个城市的欢迎。
绝大部分低地板轻轨电车的轨道直接铺设在城市既有街道上,与其他车辆共享路权。由于非独有路权且沿线站点较多,城市轻轨电车的制动系统具有操作频繁、制动距离短、制动力需求大等特点。因此对制动减速度和制动系统的可靠性要求相对较高。
此外由于低地板车辆的车下空间小,而普通空气制动系统体积较大,因此不便于在低地板车辆上安装空气制动系统。考虑到狭小的安装空间与复杂的行驶路况,一般采用电动力制动、液压制动和磁轨制动这3种制动方式组成低地板有轨电车制动系统。
1 制动系统性能要求
根据国内外有轨电车制动系统各项标准及运行经验,分别提出了平直轨道制动性能要求和坡度轨道制动性能要求。
1.1 平直轨道制动性能要求
AW0为空车载荷;AW1为满座载荷;AW2为额定载荷;AW3为超员载荷。表1为平直轨道制动性能要求,前提条件如下:①轨道坡度为0;②直线轨道;③负载条件AW3;④车轮和钢轨摩擦系数最大0.33。
1.2 坡度轨道制动性能要求
表2为坡度轨道制动性能要求,前提条件如下:①轨道坡度为60‰;②直线轨道;③车轮和钢轨摩擦系数最大0.33。
2 制动系统设计
本设计方案采用国际上比较先进的5编组3转向架浮车型设计,为100%低地板车辆。制动系统以电动力制动为主,液压制动为辅,磁轨制动仅在紧急情况启用。

表1 平直轨道制动性能要求
注:相关技术参数参照①《BS EN 13452-1:2003》铁路应用-制动-大众运输制动系统;②《CJ/T 417-2012》低地板轻轨电车车辆通用技术条件。

表2 60‰坡度轨道制动性能要求
2.1 制动系统功能
低地板有轨电车制动系统包括以下功能:
①常用制动功能:常用制动是有轨电车正常运行时采用的制动功能。它使有轨电车降速停车或在斜坡上保持速度恒定。
②紧急制动功能:紧急制动功能是在紧急情况下采用的制动功能,使车辆以最大减速能力停车,从而最大限度的保证车内人员和车外人员的安全。
③安全制动功能:安全制动是制动系统最后的安全保证。在车辆控制系统或牵引系统失控、失效的情况下,或出现其他重大故障时,需启动安全制动,使有轨电车停车。
④保持制动功能:保持制动是仅次于常用制动的最常用的制动功能,其作用是使有轨电车在车站或停车信号处保持静止,防止溜车。
⑤停放制动功能:车辆停车断电时自动施加停放制动,不需要牵引控制单元参与。停放制动独立施加一个一直作用的恒定制动力。车辆得电后可自动转换为保持制动状态,停放制动可进行手动缓解。
⑥自动负载检测:每个转向架都有负载检测装置,负载信息将送到制动控制单元用于自动调整制动力。制动控制单元具有分配整车制动力的功能,以便减少制动冲击。
⑦车轮滑动保护和撒沙装置:为避免轮轨擦伤,确保有轨电车制动功能,车辆制动系统具备车轮滑动保护功能,在车辆两端最外侧车轮附近安装有撒沙装置。在检测到车轮发生滑行时,车辆控制系统自动控制撒沙装置进行撒沙,当有轨电车速度低于3 km/h时,撒沙装置处于关闭状态。
2.2 设备选型及布置
图1是有轨电车配置图。低地板有轨电车每辆车由5个车体3个转向架组成。两端布置的是动车转向架,中间布置的是拖车转向架。动车转向架制动系统包含3种制动类型:电动力制动、液压制动、磁轨制动、拖车转向架制动系统包含两种制动类型:液压制动,磁轨制动[1]。
每个动车转向架都有2个牵引单元,每个牵引单元包括1个牵引电机2个齿轮箱,以此来驱动2个车轮。每1个牵引单元包含1个安装在驱动轴上的制动盘和1套夹钳。每个拖车转向架包含2个制动盘和2个主动夹钳。表3中列出了各车制动设备分布及数量。
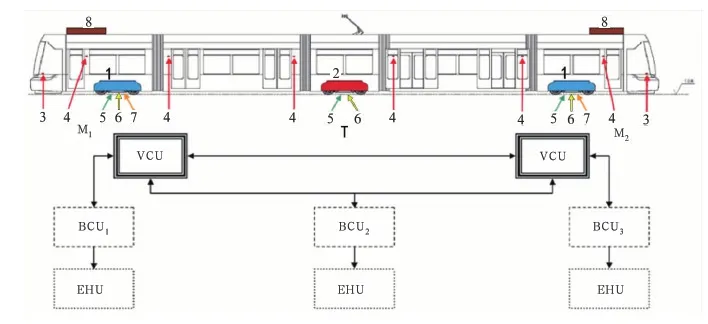
图1 车辆配置

名称动车M1拖车T动车M2数量制动控制单元BCU0101制动控制模块HVIsa1012动车液压单元HPU1012拖车液压单元HPU0101辅助缓解装置AHPU1012蓄能器ACC0101制动盘460×50(拖车)0404主动式液压夹钳72kN(拖车)0404电机轴制动盘370×34(动车)2024被动式液压夹钳20kN(动车)2024载荷传感器1113速度传感器0404磁轨制动器66kN2226
2.3 工作原理
如图2所示,制动系统有两种类型的执行机构。被动夹钳用在动车转向架上,主动夹钳用在拖车转向架上。当没有压力供给时,被动夹钳执行机构施加最大制动力,主动夹钳执行机构则没有制动力。液压制动系统主要由制动控制模块、制动控制单元、软启动模块、液压控制单元、辅助缓解单元、蓄能器、制动夹钳、制动盘等组成[2]。制动控制单元BCU独立控制一个转向架上的制动力和液压动力单元。软启动模块用来控制液压动力单元的启动和停止。液压控制单元的作用是根据接收到的列车制动指令通过比例阀来控制输出的液体压力,从而实现控制液压夹钳的夹紧力。液压控制单元中的压力转换开关用来实现制动施加和缓解的控制。蓄能器可以防止启用防滑功能时系统压力产生较大变化[1]。紧急制动和安全制动时需求的制动力较大,会自动启用磁轨制动。车辆停车后,磁轨制动断电解除。

图2 液压制动系统原理图
2.4 控制逻辑
(1) 触发源及过程解除(见表4)

表4 制动功能触发及解除
(2) 各制动工况下子系统参与逻辑
动车电动力制动可以满足绝大多数情况下有轨电车制动力要求,所以在常用制动、紧急制动时启用,因为在速度低时制动力较小,所以低速时切除。保持制动、停放制动时速度为零,不启用动车电动力制动。安全制动时包括电缆断开、电力系统等情况,电制动失效,所以不启用动车电动力制动。
动车液压制动,制动盘固定在电机轴上,因电机轴较细且转速较高所以不宜上较大制动力及频繁使用,因此在常用制动时不启用。
拖车液压制动,采用的是主动夹钳,当停车时长时间使用可能会导致压力下降影响制动效果,所以停放制动时不启用。
磁轨制动通过与钢轨摩擦产生制动力,容易损伤钢轨。目前应用比较广泛是电磁型磁轨制动器,其产生制动力的过程一直需要消耗电能,且制动力是一个定值不可调节。因此只在紧急制动、安全制动时启用。
各制动工况子系统参与逻辑见表5。

表5 各制动工况子系统参与逻辑[1]
常用制动过程中,动车电动力制动和拖车液压制动启用防滑功能;紧急制动过程中,动车电动力制动和拖车液压制动启用防滑功能;安全制动过程中,拖车液压制动启用防滑功能。
动车液压制动不设置防滑控制功能。
常用制动过程中,当发生滑行时会自动进行撒沙动作;紧急制动和安全制动过程中,会一直进行撒沙动作;保持制动和停放制动过程中,撒沙功能不启用。
2.5 制动计算
经过计算,常用制动、紧急制动、安全制动工况下减速度响应时间制动距离均能满足低地板有轨电车制动性能要求。具体计算数值见表6。

表6 制动计算
3 结束语
低地板有轨电车非常便捷,可大大缓解城市交通压力,在我国有非常大的发展空间,而低地板有轨电车的制动系统又是关系到行车安全、乘客安全的重中之重。对于国内低地板制动系统设计研究具有一定的参考借鉴意义。
[1] 韩 龙,虞大联,刘韶庆.低地板轻轨电车制动系统概念设计[J].机车电传动,2014,(5):63-65.
[2] 杨永勤,许红梅,张瑞玲,等.自主研发的100%低地板现代有轨电车制动系统[J].城市轨道交通研究,2014,17(12):108-111.
[3] BS EN 13452-1:2003 铁路应用-制动-大众运输制动系统[S].
[4] CJ/T 417-2012 低地板轻轨电车车辆通用技术条件[S].
[5] BOStrab-2008 德国有轨电车建设和运营条例[S].
Design and Research of General Technology Scheme for Low-floor Tram Brake System
DUKaijun,HANLong,WANGBinru,WUZhihao
(CRRC Qingdao Sifang CO., Ltd, Qingdao 266111 Shandong, China)
By studying the low-floor tram brake system integration technology,combined with the research and operating experience of the urban rail vehicle brake system in China, a set of scheme for low-floor tram brake system was proposed. The requirements of performance and the functional components were introduced. The working principle of the brake system was analyzed. The control logic of the brake function was designed.
tram; low-floor; brake system
��)男,工程师(
2016-03-11)
1008-7842 (2016) 05-0126-04
U239.5
A
10.3969/j.issn.1008-7842.2016.05.29