燕房线全自动无人驾驶车辆制动系统
2016-12-02范荣巍
范荣巍
(1 中国铁道科学研究院 机车车辆研究所, 北京100081;2 北京纵横机电技术开发公司, 北京 100094)
燕房线全自动无人驾驶车辆制动系统
范荣巍1,2
(1 中国铁道科学研究院 机车车辆研究所, 北京100081;2 北京纵横机电技术开发公司, 北京 100094)
随着轨道交通的发展,全自动无人驾驶技术被越来越多的应用。北京燕房线做为国内第一条自主知识产权的全自动无人驾驶线路,实现了无人驾驶技术的全部国产化。本文介绍了全自动无人驾驶技术的应用;同时对燕房线无人驾驶车辆的特点以及制动系统的组成、功能及技术特点等进行了分析。
全自动无人驾驶技术; 燕房线; 制动系统
轨道交通全自动无人驾驶(Unattended Train Operation)技术是将列车司机所执行的工作完全自动化、高度集中控制的列车控制技术。车辆在控制中心的统一控制下实现列车速度的精确调整、自动加速和制动实现全自动运营,同时可实现列车自动唤醒、自检、自动发车离站、到站精准停车和自动开关车门,完成运营后自动休眠,以及在故障情况下实现自动恢复等功能。该技术具有更高的安全性和可靠性;可实现城轨列车高密度运行,有利于降低运营成本。随着国内外轨道交通的发展,全自动无人驾驶车辆在世界很多国家得到关注和应用。
制动系统是全自动无人驾驶车辆的核心组成系统,也是实现列车全自动驾驶控制的核心关键技术。制动系统和牵引系统、网络系统和信号系统的密切配合协同,具备及时制动响应,实现车辆的制动性能满足自动驾驶的精确停车要求。区别与普通城轨列车,制动系统具备更多的冗余功能、故障自动检测和远程操作等功能,确保行车安全。
1 全自动无人驾驶技术的应用
全世界有20多个项目采用了全自动无人驾驶。法国从里尔市建成全自动驾驶系统后,里昂、巴黎等多个城市地铁线路采用无人驾驶技术。英国伦敦和格拉斯、德国纽伦堡的U2、U3线等也都采用了无人驾驶系统。新加坡于2002年也建成通车了NEL线无人驾驶系统;意大利的都灵市也修建了无人驾驶系统。从目前的趋势看,无人驾驶技术得到了大量的应用和发展。
国内经过多年的发展,目前在上海、北京等已经有应用的无人驾驶项目。但均采用国外的控制系统。上海轨道交通10号线采用无人驾驶设计,开通初期,从运营安全角度考虑,采用有人驾驶模式目前实现了有人值守的无人驾驶模式,配备司机但不参与直接驾驶,只负责监控车辆运行。北京轨道交通机场线采用全自动无人驾驶列车,全线采用直线电机车辆,4辆编组,实现了列车的精确定位、高速运行、实时跟踪和自动折返,缩短了列车运行间隔,提高了行车密度和旅行速度。但一直没有实现真正的无人驾驶。香港南港岛线(东段)将采用完全无人驾驶运营的地铁列车,采用3辆编组方式,无需司机操控,即可实现列车自动唤醒、自检、自动发车离站、上下坡行驶、到站精准停车、自动开闭车门等全自动操作,正在建设。
北京轨道交通燕房线车辆是国内首家自主知识产权的全自动无人驾驶车辆,列车、牵引、网络、信号均采用国产化设计。车辆设计充分考虑各场景及远程控制功能,具备远程唤醒、自动折返换端、自动调车、远程紧急制动缓解、车上设备工作状态远程检测、蠕动模式、跳跃模式等功能。
2 全自动无人驾驶车辆的技术特点
全自动无人驾驶车辆原本司机完成的工作由运营控制中心(OCC)来进行,设备的配置或控制、逻辑都采用冗余备份的方案;同时考虑设备故障后能够原车控制或自动降级,从硬件和软件方面进行相关补充或补偿,保证列车运行安全可靠。
(1)列车采用开放式司机室,司机操纵台整体封闭,仅用于紧急事故情况或车场调车作业时的人工驾驶;
(2)车辆增加了障碍物检测系统以及脱轨检测系统。采用高灵敏度的传感装置探测沿线障碍物,当车辆接收到障碍物、脱轨检测信息后,触发紧急制动,避免车辆脱轨或倾覆。
(3)列车应具备更高的可靠性及安全性,充分考虑系统的容错能力。关键系统,如制动、信号系统以及列车控制电路等采用冗余设计。
(4)列车需具备快速、准确、安全的故障诊断能力和完善的监控功能,以便对列车运行状态进行监控、诊断及故障远程处理。因此,要求各子系统具备完善的故障诊断能力。最大程度的确保车辆的安全运营。
(5)列车及子系统需具备多场景多模式运营的控制及响应能力,车辆可自动唤醒、进站停车、折返换端、休眠、自动调车以及在雨雪模式、蠕动模式下实现全自动控制。使得车辆按照接近优化的运行曲线进行运营,达到节能环保的目的。全自动化运营也避免了人为操作失误导致的运营故障。
3 燕房线全自动无人驾驶车辆制动系统技术
燕房线制动系统采用架控方式的微机控制模拟式直通电空制动系统,更好的适应列车4辆编组的要求,在单个BUC故障下具有更高的冗余和可靠性。制动系统采用通用及兼容配置,可满足远期车辆速度为100 km/h,6辆编组的扩编要求。
3.1 燕房线制动系统的组成
制动系统主要由风源系统、制动控制单元、辅助控制模块以及基础制动等组成。
全列车有两套风源系统。风源系统包括空气压缩机、双塔干燥器、油水分离器、安全阀、压力开关等。两套风源系统互为冗余,由TCMS集中控制管理,采用单双日网络控制,压力开关备用。风源系统设置温度、以及干燥监控等功能,便于状态的监控和故障诊断。
每辆车配置制动网关单元(EP09G)和制动控制单元(EP09S)。EP09G通过MVB总线接收制动指令和电制动信号,并计算本单元中各个转向架上应施加的空气制动,通过制动系统CAN总线传送给本单元的各架控EP09S。两辆车组成的一个CAN网段内,两套EP09G分别工作在主从模式,互为冗余,提高系统可靠性。
EP09S根据接收到的制动力请求进行基于转向架的常用制动和紧急制动控制,以及进行基于轴控的防滑控制。同时,装置基于软件和硬件的监控功能,能检测系统潜在的风险及故障。
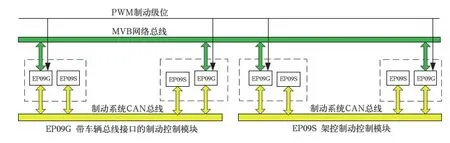
图1 制动系统的组成
辅助控制模块集成了停放控制功能及空气弹簧供风控制功能,采用集成化和模块化设计,便于设备安装。制动系统采用轮盘制动方式,包括制动夹钳及闸片。每轴配备一套具有停放制动功能的夹钳,可保证超员列车能安全停放在线路的最大坡道上。
3.2 燕房线制动系统的功能
(1)常用制动
常用制动用于车辆的正常减速制动和停车制动,根据载荷和制动级位调节制动力。在全自动无人驾驶状态下,根据信号的制动指令和载荷实施相应的制动。速度80 km/h最大常用制动的平均减速度不小于1.0 m/s2。
常用制动采用电空混合制动方式并优先使用电制动,当电制动不能满足制动力要求时,由空气制动力补充;电制动在低速退出后,由空气制动替代。制动系统在补充空气制动时按等磨耗原则在各转向架上平均施加空气制动力 。常用制动指令通过MVB网络或PWM指令线传送给EP09G网关单元,网关单元通过制动CAN总线控制CAN网段内(1动1拖) 每个制动控制单元的空气制动力。
(2)紧急制动
紧急制动采用纯空气制动方式,用于紧急情况下的安全停车。 速度80 km/h紧急制动的平均减速度不小于1.2 m/s2。
紧急制动由列车线控制,采用失电制动,得电缓解,具有故障导向安全的原则。
(3)停放制动
停放制动用于保持列车长时间静止状态的一种制动方式。停放制动是由弹簧施加的制动,具有制动力长时间不衰减的特性。在全自动驾驶车辆中,停放制动的施加和缓解不仅可以通过控制线远程操作,排风后施加的停放制动还可以通过缓解机构人工缓解。
(4)保持制动
保持制动用于保持列车停车后的静止状态和列车起动过程中防止倒溜。
保持制动施加指令在列车接近零速时由信号系统通过TCMS发给制动系统,当信号系统在列车速度低于0.5 km/h时未发出保持制动施加指令,制动系统自动施加保持制动。保持制动缓解指令由TCMS在牵引力足以起动列车发给制动系统,当TCMS系统在列车速度高于0.5 km/h时未发出保持制动缓解指令,制动系统自动缓解保持制动。
在全自动驾驶车辆中,正常模式下保持制动根据信号系统的指令进行保持制动的施加缓解;同时根据列车的牵引及速度参数进行自动施加和缓解,确保车辆的自动驾驶功能。
(5)防滑功能
制动系统具有基于单轴控制的滑行保护功能。发生滑行时,先由电制动进行防滑控制,电制动连续滑行时或严重滑行时,由牵引系统主动切除电制动滑行信号,由空气制动进行滑行控制。
基于燕房线高架线路的特点,优化防滑功能的参数和判据,采用减速度及速度差检测进行防滑控制。
(6)系统检测及故障诊断功能
制动系统具有系统检测及故障诊断功能。系统检测包括上电自动检测和运行检测。
运行检测是在系统正常工作时不需要外部干预也能进行的检测。运行检测内容主要包括:压力传感器自检、速度传感器故障、MVB通信故障等。
根据全自动无人驾驶车辆的特点,制动系统的故障诊断主要是对系统的功能进行诊断,如各种制动和缓解功能故障。当系统检测出有故障时,能够通过MVB发送给列车监控系统(TMS),并有控制中心根据故障的影响程度进行有效的处理,确保列车在线路正常运营。
3.3 燕房线制动系统的特点
制动系统适应全自动无人驾驶车辆的要求,充分考虑系统的安全和冗余设计,具有以下的特点:
(1)为保证系统的高可靠性、高可用性要求,系统采用冗余设计:
①PWM制动级位与MVB网络指令互为冗余,网络中断时通过紧急牵引模式实现制动功能。
②制动系统采用MVB与CAN两级网络结构,CAN网段内两个EP09G互为热备冗余。
③MVB网络与CAN网络均采用两路冗余的方式,一路故障时自动采集另一路。
④气动控制单元采用双路冗余的气路控制结构,两路压力控制阀的输出可连通阀沟通。正常情况下只有一路压力控制阀工作,当一路压力控制阀故障时可通过连通阀使用另一路来控制制动缸压力。
(2)制动系统采用安全性设计,具有更高的安全保障措施,以保证在发生紧急情况时能紧急制动能可靠施加:
①紧急制动为“失电制动”,紧急制动安全环路一旦失电列车自动实施紧急制动。
②紧急制动采用硬线直接控制而不是通过CAN网络进行控制,以提高紧急制动的安全性。
③紧急制动时的空重车调节采用失电锁存式电子称重阀,控制电源失电时仍保持失电前的空重车状态。
④紧急制动的电子称重阀具有机械式压力上限和下限控制可以对称重故障时紧急制动压力进行上下限限制;
(3)制动系统具备快速、准确、安全的故障诊断能力和完善的监控功能。制动系统可将系统故障以重故障、中故障和轻故障进行分级判断,并通过网络上传TCMS,以便于对列车运行状态分析判断和故障远程处理。
(4)制动系统具有远程制动切除功能:每个转向架设置一个远程切除电磁阀,用于EP09控制单元未正常缓解时,可通过车辆电路控制实现远程缓解操作。当某转向架被远程切除后,该架丧失包含紧急制动在内的空气制动力。为确保安全,车辆电气控制可以保证一列车只允许一个远程切除电磁阀进行远程缓解操作。
(5)制动系统增加了踏面清单功能:为改善轮轨间黏着状况,每天出车前由TCMS控制施加踏面清扫,以确保轮轨间黏着。
(6)制动系统可响应车辆跳跃模式:“跳跃模式”是在停车位置超出正常范围后短距离移动列车的一种方式。“跳跃模式”需适当减小保持制动力使列车能够移动,但还要防止列车溜车或者移动距离过长。
制动系统检测硬线或网络上“跳跃模式”时,制动系统自动减小保持制动力,并始终施加,直至退出跳跃模式。
4 结束语
全自动无人驾驶系统是未来城市轨道交通发展的趋势和技术制高点。作为核心系统的制动系统,将随着不同线路应用的要求,不断的增加系统的可靠性和功能,适应全自动无人驾驶车辆的要求。北京轨道交通燕房线在系统的自主化设备集成、安全运行技术及信号、车辆装备的研发和制造上取得阶段性成果,将进一步引领无人驾驶技术的应用和推广。
[1] 朱蓓玲,宋 键.全自动无人驾驶车辆功能与特点[J].地下工程与隧道,2005,(4):33-35.Braking System of Fully Automatic Driverless Metro Car in Yanshan-Fangshan Line
FANRongwei1,2
(1 Locomotive and Car Research Institute, China Academy of Railway Science, Beijing 10081, China;2 Beijing Zhongheng Electromechanical Technology Development Co, Beijing 100094, China)
With the development of urban rail transit,the fully automatic driverless technology has been applied in more and more subway lines. Beijing Yanshan-Fangshan Line is the first metro line with independent intellectual property rights of fully automatic driverless integrated technology. The integrated technology realized localization completely. This paper introduces the application of the fully automatic driverless technology. The characteristic of the vehicle of Yanshan-Fangshan Line is also introduced. Especially the composition,function and technical features of the braking system are analyzed in detail.
automatic driverless technology; Yanshan-Fangshan Line; braking system
��)女,助理研究员(
2016-05-24)
地铁与轻轨
1008-7842 (2016) 05-0107-03
U239.5
A
10.3969/j.issn.1008-7842.2016.05.25
