地外天体采样任务的地面遥操作系统架构设想
2016-12-02赵志晖邓湘金郑燕红姚猛李群智薛博
赵志晖 邓湘金 郑燕红 姚猛 李群智 薛博
(北京空间飞行器总体设计部,北京 100094)
地外天体采样任务的地面遥操作系统架构设想
赵志晖 邓湘金 郑燕红 姚猛 李群智 薛博
(北京空间飞行器总体设计部,北京 100094)
为解决航天器地外天体采样任务中约束条件多、未知因素多、工作过程复杂、通信延时大和工作时间紧张等难题,文章针对地外天体采样任务中的地面遥操作系统进行分析,以快捷、准确、有效为设计目的,提出了一种地面遥操作任务支持系统概念设想,利用计算机技术代替人工参与,提高了器地交互效率和可靠性,可广泛应用于深空探测领域,尤其是地外天体采样任务。
航天器;遥操作;地面支持系统
1 引言
迄今为止,人类已实现的地外天体探测方式主要有掠飞、撞击、环绕、软着陆和采样返回等。随着太空任务越来越复杂,对地面遥操作系统的要求也越来越高,空间遥科学也成为了空间科学中亟待解决的重要技术问题之一。而地外天体采样任务由于复杂度高、难度大、工作环境和工作对象属性具有非预知性和不确定性,以及任务执行过程中要求机动灵活、高适应性、高精度等,成为最典型的空间遥科学应用之一[1]。
从空间遥科学的定义而言,空间遥科学实质是遥现场和遥操作的集成运用[2],涉及遥信息获取、遥信息传输、地面遥操作三大技术领域。遥操作是空间遥科学得以实现的执行环节,而地面遥操作系统是遥操作有效开展的基础和地面支持系统。在实践中遇到的最大的难题是延时,因为器地距离遥远,遥信息的传输需要较长的时间。以地球-火星通信为例,考虑地火最远距离情况下,一个通信周期需要40min左右;另一方面则是由地面遥操作系统效率较低所致,从遥信息处理到遥操作决策的整个过程需要进行步骤优化和时间把控。
地外天体采样任务旨在从地球以外天体采集土壤、岩石等样品,并对其进行就位分析或运载返回地球进行研究分析,是复杂性较高、难度较大的深空探测任务之一。地外天体采样任务主要通过软着陆就位勘察或采样返回的探测方式。由于地外天体采样任务需要根据采样地点环境状况和采样目标理化属性选择相应的采样方式、恰当的采样时机和合理的采样策略[3],而地点环境状况和采样目标理化属性又具有不可预知性和不确定性的特点,所以地外天体采样任务相较其他深空探测任务需要更多、更有效的地面遥操作系统支持。
苏联/俄罗斯、美国等国家已对地外天体土壤、岩石等样品成功进行过多次采样、就位分析及返回任务。我国迄今为止尚未进行过地外天体采样任务,在未来的深空探测尤其是地外天体采样任务中,研制高效的地面遥操作系统是一项亟待开展的工作。本文对国外成熟的地面遥操作系统进行了调研,提出了一种基于自动化流程思想的快捷、准确、有效的地面遥操作系统概念设计,可为未来面向地外天体采样任务的地面遥操作系统设计提供参考。
2 地面遥操作技术调研
2.1 苏联月球车
苏联于1970年11月发射携带巡视器月球车1号(Lunokhod-1)的月球-17探测器(Lunar-17)[4],首次使用巡视器在月面巡视勘察,巡视器共行走10.54km,返回传输2万张照片和200段视频,进行了500余次的月壤力学试验.对25个点上的土壤进行了化学分析。并于1973年1月发射携带巡视器月球车2号(Lunokhod-2)的月球-21探测器(Lunar-21),在月面开展科学探测活动,巡视器行走里程达37km。
以上两个月面巡视器的地面操控中心,以不同摄像头形成的小画幅图像作为参考,完成月面巡视器的月表运动控制,其中障碍辨别功能、确定到障碍的距离、分析道路可穿越性和月面巡视器运动控制、科学探测任务执行等操作,均由地面遥控组的成员共同完成。
在Lunokhod遥操作过程中,器上基本没有自主能力,接收和传输电视图像,及遥测信息均具有时间延迟;由于地月距离较近,遥操作的时延问题并不凸显。
2.2 火星探路者
美国火星探路者(Pathfinder)项目使用的索杰纳(Sojourner)巡视器[5],于1996年12月发射,1997年7月在火星表面的战神谷(Ares Vallis)区域着陆。Sojourner在火星表面上工作了约83个火星日,对火星表面岩石、土质的地质与元素成分以及火星大气结构进行了采样分析。
由于火星与地球之间通信存在较大的时延,因此,相对于月球巡视器,对火星巡视器的自主性有更高的要求。Sojourner通过着陆器与地面进行周期性的通信,由地面巡视器控制工作站完成遥测信息分析和遥控指令上行。着陆器与地球之间的通信每天进行两次,每次两个小时。Sojourner定期向地球发送请求指令,根据地面指令执行任务,指令执行结果生成遥测数据,并将遥测信息存储在着陆器上;当没有可执行的指令时,Sojourner发送前一个周期的遥测信息到着陆器上。当巡视器每天工作结束时,地面科学家和工程师小组利用巡视器和着陆器拍摄的图像,指定巡视器下一步的目标位置,进行路径规划,形成下一次的控制指令。
在Sojourner遥操作中,由于地球和火星之间的时延使地面操作人员不能实时控制巡视器,地面操作人员根据传回的图像周期性地操作控制巡视器;虽然器上自主能力不高,但在一定程度上缓解了通信延时给遥操作带来的困难,使大延时的地面遥操作成为可能。
2.3 火星探测漫游者
火星探测漫游者(Mars Exploration Rover,MER)[6]是美国国家航空航天局(NASA)的2003年火星探测计划。MER包含2个项目(即MER-A与MER-B),分别为勇气号(Spirit)和机遇号(Opportunity)。勇气号于2004年1月4日在火星的古谢夫环形山(Gusev)成功着陆。机遇号于2004年1月24日在与古谢夫环形山几乎相背的火星赤道以南2°的梅里迪亚尼平面(Terra Meridiani)顺利着陆。任务目标是在岩石和土壤中搜寻水活动的线索。
MER的任务执行模式是以每个火星日为周期来开展的。由地面科学家和工程师小组基于前一天传回的图像和数据,制定早晨发送的指令序列,专门用于当个火星日的活动;活动结束后,巡视器将获得的图像和数据传回地面。每个火星日的活动时间大约为4h,一般集中在中午时分。在一个任务执行的过程中,科学家组负责决定巡视器所需要执行的科学探测任务;基于确定的科学探测任务,工程师组和科学家组共同决定需要上传到巡视器的指令序列;在巡视器接收到上传指令后,即会执行指令;与此同时,地面操作人员监控巡视器的运行,并将得到的科学和工程数据发送给科学家组和工程师组;在分析返回的科学数据和确认巡视器的状态之后,科学家和工程师小组将会基于这些信息确定下一步的决策,然后再将决策的指令序列上传,由此循环往复。
在MER遥操作中,MER具有较高的自主能力,可以在大时延情况下完成较复杂的科学探测任务;由于MER每天执行的任务确定过程复杂,需要经过评估、分析、规划、讨论、仿真和试验验证等处理过程,所以每天仅执行一次任务序列,效率较低。
2.4 国外调研情况小结
深空探测领域的地面遥操作系统,从20世纪60年代美苏“空间竞赛”时期开始出现。从苏联月球车1号地面操控系统到美国Sojourner火星车地面操控系统,再到美国MER地面任务规划与操控系统,随着计算机、机器人等技术的发展,地面遥操作系统日臻完善,现如今已经可以通过地面计算机系统与星上计算机系统的器地自主交互的方式,实现将人完全置于决策者的位置,而任务的执行靠计算机系统自主完成的工作模式,在深空探测尤其是地外天体采样任务中发挥了重要的作用[7]。但时延仍旧为器地交互遥操作技术发展过程中要解决的重要问题之一(见表1)。
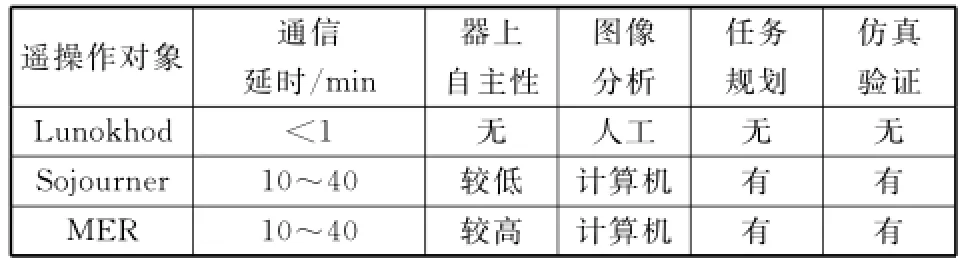
表1 地面遥操作系统调研情况Table1 Investigation of the telemanipulation system
综上分析可知:
(1)通信时延主要与地球和探测目标星球的距离有直接关系,若要提高通信效率需要通信技术和手段的革新。
(2)通过人工智能、视觉伺服等技术提高器上自主能力,可以在一定程度上降低延时带来的遥操作困难和风险。器上可通过碰撞检测、自主避障、一定程度的器上自主任务规划等能力完成一些科学探测任务,并规避一些任务执行过程中可能存在的不可逆风险。
(3)随着任务复杂度的提高,器上自主能力的局限性逐渐凸显,需要地面进行更多、更有效的干预,地面遥操作流程需要进一步优化,在数据处理及遥现场再现、任务规划与仿真验证、策略生成及辅助决策等环节都需要通过计算机技术提高效率。
3 地外天体采样任务的地面遥操作系统概念设计
我国嫦娥三号探测器首次在地外天体上实现软着陆和巡视,是我国迄今为止首次且唯一一次尝试和初步实践地面遥操作系统,通过人机配合,完成一些非实时月面任务。该地面遥操作系统也具备图像分析、任务规划、仿真验证等功能,但地面遥操作过程由于需要较多的人工干预,效率同样较低。我国迄今为止尚未进行过地外天体采样任务,因此在未来的深空探测尤其是地外天体采样任务中,快捷、准确、有效的地面遥操作系统研究需要借鉴国外的先进经验,并力求创新,实现技术上的突破。
3.1 设计要求与设计原则
由第2节调研内容可知,遥操作技术在复杂性较高、难度较大的深空探测器任务中发挥了重要的作用。在未知因素多、约束条件多、工作过程复杂的地外天体采样任务中,应设计更加合理高效的地面遥操作系统进行支持。为了合理的确定器地交互任务周期,选择地面操控时机,制定遥操作执行策略和预案,地外天体采样任务的地面遥操作系统需要解决以下主要问题。
(1)由于任务实施受样品采集目标环境影响较大,例如地形等,所以采样区域和采样目标的立体三维信息是不可或缺的重要基础信息之一。
(2)由于任务实施过程复杂,设备间相互配合要求高,对于任务执行需要提前进行规划和仿真验证。
(3)由于任务实施未知因素较多,比如采样目标的理化特性等,需要监控采样装置的工作状态,并及时做出器上自主干预或根据预警信息进行人工地面干预。
(4)由于任务实施工作时间紧张,动作紧凑、连贯、次序性强,所以地外天体采样任务的地面遥操作系统需要更加快捷、准确、有效,尽可能地通过器地交互数据自动化,将人置于决策层,减少过多的人为参与所付出的时间代价和误操作风险。
地外天体采样任务中地面遥操作系统设计原则如下。
(1)有效性原则:由于设计服务对象是地外天体采样,因此在地面遥操作系统设计之前应尽可能地了解采样目标、采样方式、采样时机、采样过程等,以使系统建模、任务规划、仿真分析等过程尽可能真实可靠[8]。
(2)适应性原则:由于采样任务在轨约束条件和未知因素较多,所以地面遥操作系统设计应具备较强的适应性,可以通过知识积累及专家知识库,实现对多种常规工况及未知工况的任务分析规划与执行。
(3)时效性原则:在器地遥测遥控交互以及地面大数据分析过程中,尽可能将人置于决策层,通过器地交互数据自动化,使地面遥操作系统更加快速和方便[9]。
3.2 概念设想与工作原理
地外天体采样任务在轨支持中,需要在有限的时间内完成复杂的任务实施过程,所以其地面遥操作系统需要对任务情况进行全面获取、快速处理和分析评估[10],进而提供有效的地面决策和干预,快捷、准确、有效的在轨任务支持是地面遥操作系统设计的核心目标。因此,需要在具备采样环境及过程遥显示、任务规划遥分析、执行策略仿真验证等基本功能之外,应增加地面遥操作自动化流程功能。将遥测数据和工程图像数据快速处理、创建采样目标区域的三维场景、对采样目标样品和采样装置的工作状态进行分析,以及根据探测器状态、光照、能源、测控、温度情况和采样目标分析数据,对采样任务进行快速规划,对仿真等环节通过任务调度功能模块进行自动化无缝连接,以计算机的高效率替代人工操作的低效率[11],第一时间为地面操控人员提供任务规划和仿真结果用于辅助决策,提高地面遥操作系统的时效性。
针对地外天体采样任务的特点,本文设想的地外天体采样任务地面遥操作系统概念原理框图如图1所示,主要包括数字仿真分析系统和任务调度与控制系统两部分[12]。其中数字仿真分析系统由数据处理、图像处理、任务规划、数字仿真、专家知识库等子功能模块组成,任务调度与控制系统由数据处理、遥控管理、遥测显示等子功能模块以及任务调度模块组成,数字仿真分析系统的各软件都受任务调度模块的调度控制。地面遥操作系统设计以自动化流程设计为核心思想,实现快捷、准确、有效的地面支持。

图1 地外天体采样任务的地面遥操作系统构成概念框图Fig.1 Schematic diagram of the telemanipulation system for the sampling mission
此地面遥操作系统的工作原理流程如下。
(1)地面数据处理模块接收和存储器上下传的遥测数据和图像数据,并在地面系统局域网中广播;
(2)遥测显示模块对下行数据进行实时解析和显示,并由任务调度模块发起地面遥操作自动化处理流程,包括图像处理、任务规划、仿真验证等任务;
(3)图像处理模块可快速地进行图像处理,三维立体重构采样环境,并给出采样目标点、采样装置状态等重要信息;
(4)任务规划模块根据图像分析结果和遥测数据,快速进行任务规划,得到任务执行指令序列,并经过数字仿真模块的验证,最终得到多个可行有效的策略方案供地面操控人员决策和选择;
(5)专家知识库模块可以记录地面试验中所有经验数据和故障模式,辅助任务规划和数字仿真,以提高任务规划和仿真的快捷性、准确性和有效性;
(6)地面遥操作系统在第一时间为地面操控人员提供任务规划和仿真结果用于辅助决策,最终所决策的策略方案,以任务执行指令序列的形式上行注入探测器执行;
(7)该全过程在任务调度模块的调度下完成,地面操控人员只需在任务调度终端和遥测显示与判读终端进行监视,并在总控终端进行适时人工干预。
3.3 关键技术
地外天体采样任务中的地面遥操作系统关键技术如下。
(1)面向任务的模型建立,直接关系到任务规划和数字仿真的真实性和有效性,是地面遥操作系统最基础组成部分,而真实有效的规划仿真又是地面遥操作支持的最关键环节。
(2)面向任务的专家知识库建立,直接关系到器地交互对于任务开展的自适应,越强大的专家知识库,越能在不确定因素多的采样任务复杂工况中发挥辅助决策的重要作用,增强地面遥操作系统的适应性,降低任务风险,提高任务支持的可靠性和准确性。
(3)任务调度自动化,可在器地遥测遥控交互及地面大数据分析过程中,尽可能将人置于决策层,通过器地交互数据自动化,使地面遥操作系统更加快速和方便。
为改善并解决地面遥操作系统时效性问题,此地面遥操作系统的创新点在于任务调度与控制系统的任务调度模块,通过任务总线的管理和调度整个地面遥操作系统的其他各模块。当地面遥操作系统各个模块在任务总线上查询到任务调度模块推送的任务时,获取任务并执行,并周期性地向任务调度模块馈送自身运行的状态信息。
任务调度模块根据地面试验和在轨任务的流程设计,在地面试验或在轨任务执行进程中通过对器地交互信息和地面遥操作系统各个功能组成模块之间交互信息的监测控制,以及对任务生命周期内的重要事务和数据活动的跟踪分析,实现对工作流程的自主进程控制和管理,提高地面遥操作系统效率。例如:数字仿真分析系统各组成模块需要配合工作,交互输入输出,关系密切,如果由计算机技术来完成复杂的运算和操作及调度管理,各模块的运行和信息交互在任务调度模块的调度管理下全部自动完成,那么就可以高效地完成图像处理、任务规划、仿真分析、专家知识库评估等一系列工作,将人置于决策层,从而大大提高地面遥操作系统的可靠性和时效性。
4 结束语
作为复杂性较高、难度较大的深空探测器任务之一,地外天体采样任务具有约束条件多、未知因素多,工作过程复杂,工作时间紧张,动作紧凑、连贯、次序性强,设备间相互配合要求高等特点。本文根据地外天体采样任务特性,以自动化流程为核心思想,以快捷、准确、有效的在轨任务支持为目标,提出了一种由任务调度与控制系统和数字仿真分析系统等组成的地面遥操作任务支持系统概念设想,并阐述了其工作原理,具备统一调度控制、快速图形分析和可靠规划仿真等特点。
(
)
[1]薛书骐,姜国华,田志强,等.空间遥操作任务中显控界面关键技术研究进展[J].载人航天,2014,20(5):498 Xue Shuqi,Jiang Guohua,Tian Zhiqiang,et al.Progress of the key technologies in human-computer interface in space teleoperation[J].Manned Spaceflight,2014,20(5):498(in Chinese)
[2]杨艳华,阳方平,李洪谊,等.基于时延预测的空间遥操作系统广义预测控制[J].载人航天,2013,19(2):30-31 Yang Yanhua,Yang Fangping,Li Hongyi,et al.Generalized predictive control for space teleoperation systems based on time delay prediction[J].Manned Spaceflight,2013,19(2):30-31(in Chinese)
[3]刘志全,庞彧,李新立.深空探测自动采样机构的特点及应用[J].航天器工程,2011,20(3):120-124 Liu Zhiquan,Pang Yu,Li Xinli.Characteristics and applications of automatic sampling mechanisms for deep space exploration[J].Spacecraft Engineering,2011,20(3):120-124(in Chinese)
[4]陈求发.航天器大全[M].北京:中国宇航出版社,2012:385-415 Chen Qiufa.Spacecraft corpora[M].Beijing:China Astronautics Press,2012:385-415(in Chinese)
[5]NASA.The Apollo program[EB/OL].[2010-06-10]http://spaceflight1.nasa.gov/history/apollo/.
[6]Pontillo T M.Spatial ability and handedness as potential predictors of spaceteleportation performance[D].New York:Massachusetts Institute of Technology,2010
[7]Rekleitis I,Bedwani J L,Dupuis E,et al.Path planning for planetary exploration[C]//Proceedings of the International Conference on Electrical Engineering 2009.New York:IEEE,2009
[8]史晓萌,节德刚,全齐全,等.模拟月壤钻进负载分析与试验研究[J].宇航学报,2014,35(6):648-649 Shi Xiaomeng,Jie Degang,Quan Qiquan,et al.Experimental research on lunar soil simulant drilling load analysis[J].Joumal of Astronautics,2014,35(6):648-649(in Chinese)
[9]魏晨曦.欧空局地面操作软件系统体系结构研究[J].空间电子技术,2013(2):104 Wei Chenxi.Research on framework of ESA ground operation software system(EGOS)[J].Space Electronic Technology,2013(2):104(in Chinese)
[10]张涛,陈章,王学谦,等.空间机器人遥操作关键技术综述与展望[J].空间控制技术与应用,2014,40(6):3-5 Zhang Tao,Chen Zhang,Wang Xueqian,et al.Overview and prospect of key technologies of teleoperation of space robot[J].Aerospace Control and Application,2014,40(6):3-5(in Chinese)
[11]李海阳,张波,黄海兵,等.航天员与类人机器人月面联合探测概念初步研究[J].载人航天,2014,20(4):304 Li Haiyang,Zhang Bo,Huang Haibing,et al.Preliminary concept study on integrated lunar exploration of astronaut and humanoid robot[J].Manned Spaceflight,2014,20(4):304(in Chinese)
[12]李群智,宁远明,申振荣,等.行星表面巡视探测器遥操作技术研究[J].航天器工程,2008,17(3):31-33 Li Qunzhi,Ning Yuanming,Shen Zhenrong,et al.Study on teleoperation of rover on planetary surface[J].Spacecraft Engineering,2008,17(3):31-33(in Chinese)
(编辑:李多)
A Thought of Telemanipulation System Structure for Sampling Mission on Extraterrestrial Celestial Bodies
ZHAO Zhihui DENG Xiangjin ZHENG Yanhong YAO Meng LI Qunzhi XUE Bo
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Considering such issuses as many restrictions,mutiple X factors,complex process,long communication time delay and limited work time in spacecraft sampling mission on extraterrestrial celestial bodies,this paper discusses the telemanipulation system for sampling mission on extraterrestrial celestial bodies,and designs a speedy exact effective telemanipulation system.The telemanipulation system advances efficiency and dependability of satellite-ground communication by using computer technology instead of human interposition.It can be applied to the deep space exploration field,the sampling mission on extraterrestrial celestial bodies especially.
spacecraft;telemanipulation;ground assistant system
V44
A
10.3969/j.issn.1673-8748.2016.05.012
2014-10-31;
2016-08-20
赵志晖,男,硕士,工程师,研究方向为航天器总体设计。Email:xzzhdr@163.com。
