基于人工神经网络的智能化煤矿监测系统的路径规划
2016-11-30张耀锋陈宝玲刘沂唐彦卿
张耀锋 陈宝玲 刘沂 唐彦卿
1.天津冶金职业技术学院 电气工程系,天津 300400;2.天津工业大学 天津300160
一、引言
煤矿、冶金等行业企业进行监测,数据采集等工作,工作环境危险,容易出现作业事故,带来安全生产隐患。研发能监测煤矿气体浓度、 温度、 湿度等环境参数的设备系统就非常必要。
本文给出了一种基于人工神经网络的智能化煤矿监测系统(简称监测系统)的设计,该监测系统可以采集矿井中的一氧化碳、氧气、瓦斯等气体的浓度,还可检测矿井的温度、湿度、相应粉尘等环境参数。监测系统还能够在矿井发生事故现场情况不明的情况下,进入灾害现场实施环境探测、数据采集,同时将信息实时地传输到救援指挥中心,为救援决策提供科学依据,对煤矿安全生产减少国家和人民生命财产的损失具有十分重要的意义。
二、系统设计
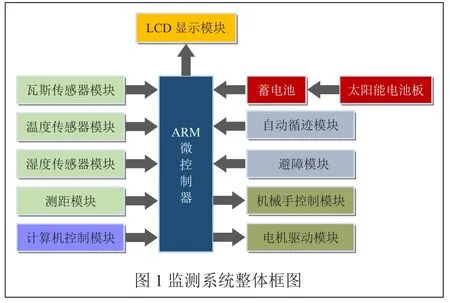
监测系统以太阳能智能车为系统载体,包括硬件设计和软件设计两大部分。监测系统采用光伏技术,通过太阳能电池板将光能转化为电能,储存在高性能蓄电池中,利用此电能作为监测系统的工作电源,并驱动监测系统行驶;各路传感器负责采集相应信号[1];CCD摄像头可实时采集矿井内的实物情况;监测系统配有LCD显示屏,LCD可实时显示采集目标的相应参数,并通过无线传输的方式与上位机进行通信,上位机实时显示矿井的状态。监测系统在运行过程中可通过传感器的检测信号实现避障、测距、机械手抓取监测物[2]、计算机控制等功能。图1为系统的硬件设计框图。
各路传感器数据的采集处理,智能化煤矿监测系统的避障、测距与上位机系统的通信控制等功能都是通过软件编程完成的。因篇幅限制,本文重点介绍监测系统应用的一种改进的人工神经网络路径规划算法实现的路径规划及其仿真。
三、监测系统的人工神经网络算法
矿井现场的地形复杂,监测系统应能自主的在其中进行避障和路径规划,监测系统应能在具有障碍物的环境中,按照一定的评价标准,寻找一条从起始状态(包括位置及姿态)到达目标状态(包括位置及姿态)的无碰路径[3-5]。
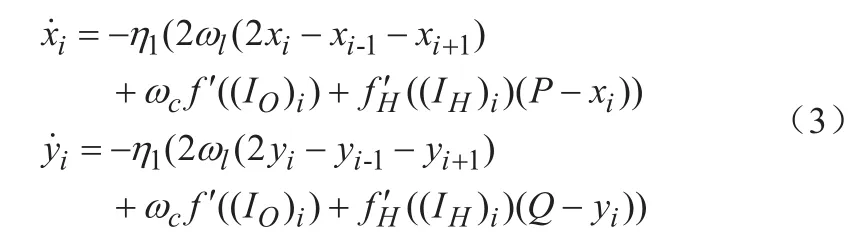
在人工神经网络路径规划算法中设计了相应检测器,其实际上为神经网络分类器。利用检测器在路径规划的过程中始终检测着路径点的位置(x,y),由神经网络分类器判断该点是否在障碍物内,即是否与障碍物相碰并将检测结果返回系统神经网络分类器,也就是在路径点到一个障碍物的罚函数的神经网络中间层和顶层结点的激发函数取为阶跃函数,则中间层的每个结点是决定该结点是否满足它的限定条件得点,若满足,则输出1,否则输出为0;若所有中间点均满足则顶层输出为1,它表示该点在障碍物内;若中间点检测出其中至少有一个不满足限制条件,顶层输出便为0,它表示该点在障碍物外。系统根据检测器返回的信息选择路径点的动态运动方程,若路径点在障碍物内则按动态运动方程(1)、(2)移动。若路径点在障碍物之外,则按动态方程(3)移动。即若路径点在障碍物外或障碍物内的路径点一旦移出了障碍物就仅按减少路径长的方向移动,不再向远离障碍物的方向移动,从而使路径能快速收敛到无碰的最短路径[6,7]。
下面应用了改进的快速人工神经网络最短路径规划算法,在此作了3点假设:障碍物是多边形围成的平面图形或者是圆形的平面图形;监测系统为圆形点监测系统,计算时障碍物的尺寸按监测系统的半径作了适当拓展;障碍物为静止的[8]。
步骤1:输入出发点P(x1,y2),及目标点P(xN,yN)的坐标,对于t=0,初始路径一般取为出发点到目标点的直线上均匀分布的点列,当x1≠xN时有:

步骤2:对于路径点P(xi,yi),i=2, 3,…,N-1,用检测器检测是否在障碍物内;
步骤3:① 若P(xi,yi)在障碍物内则按下列运动方程移动:

上式用于P(xi,yi)位于多边形的障碍物内的情况。
上式用于P(xi,yi)位于圆心在(P,Q)的圆形障碍物内的情况。
②P(xi,yi)若在障碍物之外,则按下式移动:

步骤4:重复执行步骤2、步骤3直到路径收敛。
这里,整条路径总能量函数的定义与原算法相同,一个点到一个障碍物的罚函数的神经网络结构的中间层第m个结点的输出改为:

中间层第m个结点的激发函数改为:

其中,βm是相应于障碍物每一条边的初始温度,即可以根据障碍物的形状设定各边的不同的初始温度,这样对于一些不对称图形可避免其罚函数曲面形成一边倒的情况,从而避免路径规划收敛到局部极小值。当障碍物是圆形的平面图形时不等式的个数取为1,即中间层只有一个结点,且输入为:

其中,R—圆形障碍物的半径;
(P,Q)—圆形障碍物的圆心。
四、仿真结果
通过编程实现了操作界面的设计以及障碍物、监测系统、目标点的相关参数设置,最终应用的人工神经网络算法实现了路径规划避障的最优路径的选择。在仿真过程中,分别设置了多个障碍物,图2中黑色表示障碍物,蓝色曲线表示通过的路径。
仿真结果显示,监测系统从出发点到目的地的过程中,安全的绕过障碍,最终找到了一条最优的无碰路径,仿真结果显示了算法的有效性。

五、小结
本文以煤矿监测系统的路径规划为目标,应用了一种基于人工神经网络的移动监测系统路径规划算法,针对路径规划进行了程序编辑,编程实现了操作界面的设计以及障碍物、监测系统、目标点的相关参数设置,最终基于人工神经网络算法实现了路径规划避障的最优路径的选择,算法有效、易于实现,易于扩展到三维环境。
通过计算机仿真的方法进行了验证,并通过寻优得出无碰撞路径。仿真结果表明基于神经网络的移动机器人无碰撞路径规划是可行的,方法是正确有效的。
