振动传感器的原理选择
2016-11-30
中国石油大学(华东)石油工程学院,山东青岛 266580
一、引言
传感器的品种很多,原理各异,检测对象门类繁多,因此,其分类方法很多,至今尚无统一的规定。
我们知道,同种物理量可以用多种不同转换原理的传感器来检测,同一转换原理也可以用于不同测量对象的传感器。以振动传感器为例,其工作原理[1]有:电动式、压电式、电涡流式、电感式、电容式、电阻式、光电式等等。所以,在实际的工作当中,针对不同的环境及测试需求,哪一种原理的传感器更为适合是我们需要考虑的。
二、振动传感器的类型
按工作原理划分,振动传感器的类型主要包括电阻类、电感类、电容类、压电类、霍尔效应类和磁电类,其被测量及变换原理如表1[2]所示。

表1 振动传感器的常用类型
1、电阻应变式位移传感器[3]
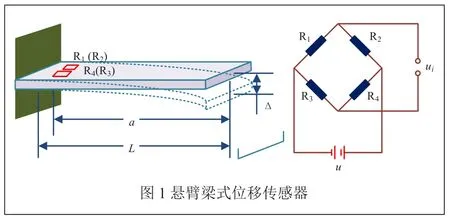
将电阻应变敏感元件安装在相应的弹性元件上,可以制成位移传感器。悬臂梁式位移传感器的结构简单,它是目前使用最广泛的一种电阻应变式位移传感器。图1是它的结构简图。
测振时,弹性片的自由端在惯性质量块的振动下产生挠度Δ时,粘贴在弹性元件上的电阻应变片同步产生变形,由于电阻应变效应使得电阻应变片的电阻相对变化率发生改变。
2、电感式位移传感器[4]
电感式位移传感器是一种利用电磁感应原理,将位移、液面振动等机械量的变化转换为线圈的自感或互感系数的变化,从而实现位移测量的传感器。它的种类很多,根据转换原理不同可分为自感式和互感式(LVDT)两种。电感式位移传感器不仅结构简单、工作可靠、线性度高,而且它检测精度高、体积小、温度适应性好。
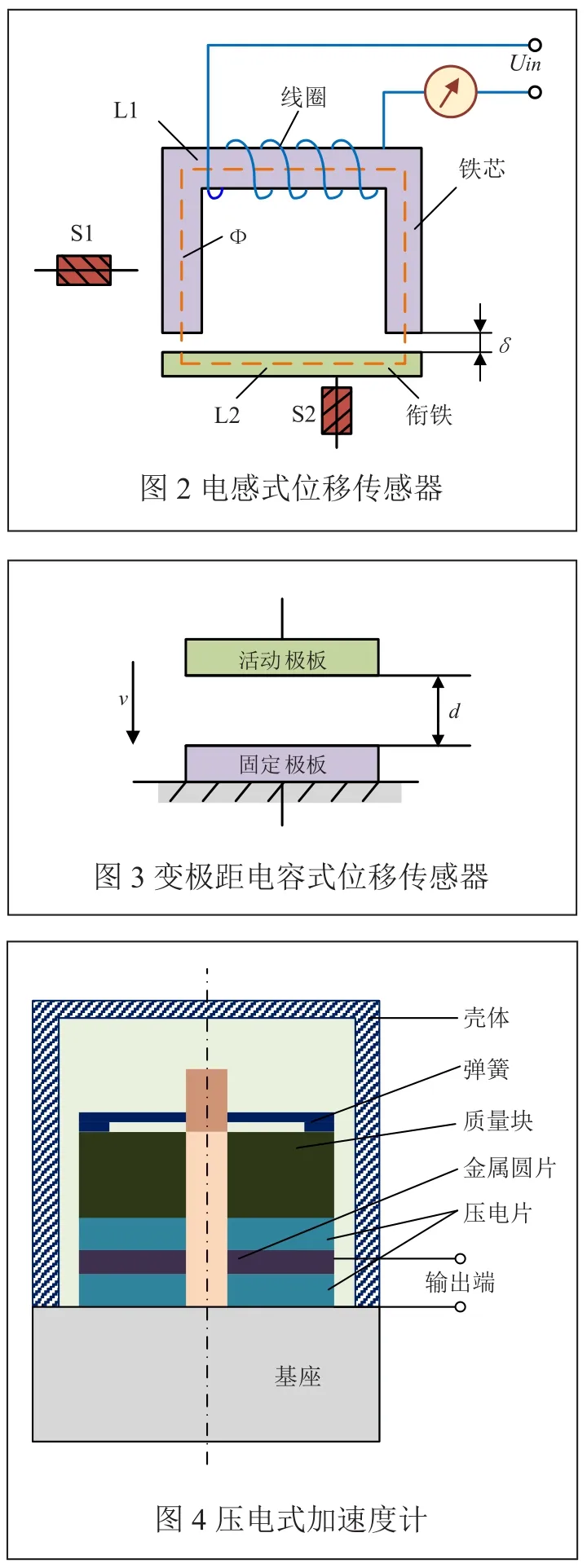
图2是简单的自感式位移传感器的原理结构简图。其中铁芯L1和活动衔铁L2均由导磁材料制成,铁芯和衔铁之间充有气隙。衔铁做出相对运动时,磁路发生变化,致使气隙的磁阻产生变化,从而引起线圈电感的变化。而电感量的大小是与衔铁的位置是有关的。因此,只要测出电感量的变化就能反推出衔铁移动量的大小,这就是自感式位移传感器的工作原理。
3、电容式位移传感器[5]
电容式位移传感器是以电容器为敏感元件,将机械位移量转换为电容量变化的传感器。变面积式电容传感器常用于角位移测量,变极距电容式位移传感器用于非接触直线位移测量。
图3为变极距电容式位移传感器的原理结构简图。测振时,固定极板随被测物共同运动,固定极板——活动极板间的距离d则改变,从而使电容大小发生变化。电容式位移传感器在微小位移测量具有不可比拟的优势,但其也有不足之处,一是电容检测电路非线性,不便后续传感器特性曲线拟合;二是电容式位移传感器测量范围小;三是检测电路较复杂,生产成本高等。
4、压电式传感器[6]
压电式传感器主要是利用压电石英晶体或压电陶瓷(如锆钛酸铅)作为敏感元件而制成的传感器,在振动测量方面,主要是压电式加速度计。图4为压电式加速度计的原理结构图,在两片并联安装的压电陶瓷片中间,有一个金属圆片作为压电式加速度计的输出极板。在压电陶瓷片和金属圆片的上面,压有一质量块m,在质量块m的上面还有一个硬弹簧片,所有这些元件(压电陶瓷片、金属圆片、质量块、硬弹簧片等)都装在同一个金属基座上。
在加速度计受振时,质量块加在压电元件上的力也随之变化。由于压电陶瓷片的压电效应,在压电陶瓷片的两个表面就产生交变的电荷量。由于压电片结构阻尼小,从而压电片受到的力正比于压电片的压缩量。压电式加速度计的特点是体积小、重量轻、工作频率范围宽、量程宽、适合于高频振动的测量,缺点是对低频振动位移的测量较为困难。
5、霍尔式位移传感器[7]
基于霍尔效应的惯性振动传感器结构示意图如图5所示。图中2个L形铁块分别与条形磁铁两端对称固定形成组合磁铁(质量为m),组合磁铁与传感器外壳之间通过阻尼器支承,霍尔元件水平放置于2个L形铁块之间的间隙中,并与塑料外壳相固定。霍尔元件后面的引线用于给霍尔元件提供工作电源,同时由振动参量转化得到的霍尔电压也通过引线输出。
在工作时,将传感器的外壳刚性地固定于被测物体上,使被测物体的主要振动方向与组合磁铁的振动方向相同。当被测物体振动时,外壳和霍尔元件随其一起振动,由于弹簧和阻尼器的作用,磁铁相对外壳产生位移。由此霍尔元件在磁场中产生位置变化,从而改变霍尔元件输出的电压。霍尔式位移传感器结构简单、体积小、重量轻,其中霍尔元件频带宽,动态特性好且价格低廉。该传感器在材料探伤、机械系统的故障诊断、噪声消除、结构件的动态特性分析及振动的有限元计算结果验证等方面都有很好的应用前景。
6、磁电式速度传感器[2]
图6为磁电式相对速度传感器的结构图。它用于测量两个试件之间的相对速度。壳体固定在一个试件上,顶杆顶住另一个试件,磁铁通过壳体构成磁回路,线圈置于回路的缝隙中。两试件之间的相对振动速度通过顶杆使线圈在磁场气隙中运动,线圈因切割磁力线而产生感应电动势e,其大小与线圈运动的线速度v成正比。
图7为磁电式惯性速度传感器的结构图。磁铁与壳体形成磁回路,装在芯轴上的线圈和阻尼环组成惯性系统的质量块。当传感器承受沿其轴向的振动时,质量块与壳体发生相对运动,线圈在壳体与磁铁之间的气隙中切割磁力线,产生磁感应电动势e,e的大小与线圈的相对速度dx01/dt成正比。
三、振动传感器的数学模型
振动传感器根据参考系的不同分为相对式振动传感器和惯性式振动传感器。[2]选择非惯性参考系描述被测体相对振动的传感器称为相对式振动传感器。相对式振动传感器主要有电感式、电容式、磁电式,如电感式位移传感器、电容式位移传感器、磁电式相对速度传感器。

惯性式振动传感器是指选择惯性参考系描述被测体绝对振动的传感器,主要有电阻应变式、压电式、霍尔式、磁电式,如电阻应变式位移传感器、压电式加速度传感器、霍尔式位移传感器、磁电式惯性速度传感器。
1、相对式振动传感器
相对式测振仪[1,2]的原理结构如图8所示。在测量时,把仪器壳体固定在不动的支架上,使测杆与被测物体的振动方向一致,并借弹簧的弹性力与被测物体表面相接触。
相对式测振仪的工作原理是:当被物体振动时,测杆就跟随它一起运动,并推动记录笔杆在移动的纸带上描绘出振动物体的位移随时间的变化曲线,根据这个记录曲线可以计算出位移的大小及频率等参数。

测杆的跟随条件是决定该类传感器测量精度的重要条件,其跟随条件推导如下:
设测杆和有关部分的质量为m,弹簧的刚度为k,当弹簧被预压Δx时,则弹簧的恢复力F=kΔx,该恢复力使测杆产生的回复加速度a=F/m,为了使测杆具有良好的跟随条件,它必须大于被测振动件的加速度amax,即:

2、惯性式动传感器
惯性式振动传感器[1,2]测振时,是将传感器直接固定在被测振动物体的测点上,当传感器外壳随被测振动物体运动时,由弹性支承的惯性质量块将与外壳发生相对运动,则装在质量块上的记录笔就可记录下质量元件与外壳的相对振动位移幅值,然后利用传感器的数学模型表达的关系式,即可求出被测物体的绝对振动位移波形。
惯性式振动传感器的力学模型如图9所示,m为惯性质量块、k为弹簧刚度、c为黏性阻尼系数。
设被测振动体的振动绝对位移为x1作为传感器的输入量,质量块m的绝对位移为x0,质量块相对于壳体的相对位移为x01。因此,质量块在整个运动中的力学表达式为:

如果考察质量块m相对于壳体的相对位移,则m的相对位移为x01=x0-x1,式(2)可改写为:

四、优选的传感器类型
与惯性式传感器相比,相对式传感器可直接将被测量(位移、速度)转换成电阻(或电荷、电压)而惯性式传感器通过联系“两个关系”来进行被测量与电感(或电容、电压)间的转换。“两个关系”指的是,被测体的振动位移x1(t)与质量块的相对振动位移x01(t)间的关系,质量块的相对振动量与电感(或电容、电压)间的关系。所以,对于惯性式传感器来说,有必要讨论输入量x1(t)到输出量x01(t)是否满足信号的不失真传递。要保证信号的不失真传递,要满足一定的条件[2]:
①系统的幅频特性A(ω)在输入信号x1(t)的频谱范围内是常数;
②系统的相频特性φ(ω)是过原点且具有负斜率的直线。
式(3)是二阶线性时不变测量系统的数学描述,x1(t)与x01(t)分别是系统的输入和输出量,设h(t)表示系统的传递特性,X1(f)、X01(f)、H(f)是x1(t)、x01(t)、h(t)的频谱,利用卷积运算,可以得到:

两边做傅里叶变换,由时域卷积定理得到:


如果将H(ω)表示为实部P(ω)与虚部Q(ω)之和的形式,
则H(ω)又可以表示为:

从中可得幅频和相频特性的表达式为:

我们知道,对于不同的输入量(确定性信号、不确定性信号),系统的幅频特性A(ω)、相频特性φ(ω)是不同的,特性曲线是复杂的。所以,对于某些信号,不失真传递是需要一定条件的;对于其他信号,则难以实现不失真传递。
因此,本文建议,振动传感器的原理首选相对式振动传感器,它包括电感式位移传感器、电容式位移传感器、磁电式速度传感器。
五、结论
在信号传递方面,相对式振动传感器优于惯性式振动传感器。这是由于,惯性式传感器需要研究从被测体的振动位移到质量块的相对振动位移的信号不失真传递条件。故进行振动测量时,我们优先选择以下传感器:电感式位移传感器、电容式位移传感器、磁电相对速度传感器。
