机器人避障问题数学模型研究
2016-11-30王瑞孙晰
王 瑞 孙 晰
1.辽源职业技术学院,吉林 辽源 136201;2.洛阳市第一中学,河南 洛阳 471000
机器人避障问题数学模型研究
王 瑞1*孙 晰2
1.辽源职业技术学院,吉林 辽源 136201;2.洛阳市第一中学,河南 洛阳 471000
机器人是一种能够在正常工作环境中自由移动、并顺利完成预定任务的智能系统。机器人的避障问题是移动机器人控制领域的研究热点。模型对机器人避障问题,分不考虑转弯和考虑转弯两种情况的路径,采用传统算法、智能算法进行了讨论。
最短路径;类比法;距离;勾股定理
在一个800×800的平面场景图,原点O处有一个机器人,它只能在该平面场景范围内活动。图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物。在图1的平面场景中,障碍物外指定一点为机器人要到达的目标点(要求目标点与障碍物的距离至少超过10个单位)。规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
一、问题分析
为了方便解决问题,将机器人看成点。先不考虑与障碍物的距离,连接点O与障碍物的顶点、障碍物顶点与顶点、顶点与目标点的直线为机器人的行走路径,比较这样的路径中最短者。再将各障碍物向外平行扩展10个长度单位,借鉴上述最短路径,从而画出满足条件的最短路径并求其长度。
二、模型的建立与求解
先不考虑转弯情形,给出O→A→B→C→O的线路图,以下均见图1。
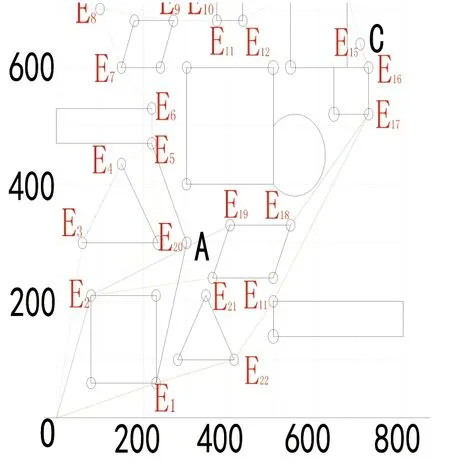
图1 O→A→B→C→O可行路径图
因为机器人所走的弧长比线段长少很多,所以可将机器人看成点。已知各障碍物顶点坐标,用C语言编程可得各路径的总路程,最后得出:
O→A的最短路径为O→E2→A,距离为462.417。
O→B的最短路径为O→E2→E4→E7→E8→E9→B,路程为845.42。
O→C的最短路径为O→E1→E21→E19→E15→E14,路程为1069.68。
A→B的最短路线为A→E5→E6→E7→B,距离为458.21。
B→C的最短路线为下表路径一,距离为683.35。
上述结论未考虑与障碍物的距离.下面将距离考虑在内,给出机器人绕障碍物的最短路径方案及路程。机器人所走的路径,包括从O→C及再回到终点的路径,可推广出以下通式。

通过求不考虑圆弧与考虑圆弧的路程看出,有圆弧的路径可使机器人避开障碍,且为最短路径。
O→A含弧的最短距离为466.51。O→B的含弧最短距离为832.87。
O→C的最短距离为1055.26。A→B的含弧最短距离为458.21。
B→C的最短距离为683.35。O→A→B→C→O的最短距离=2663.33。
若要求出从O到A得最短时间路径,先求出OA的最短路径为O,M1,M2,A,以此路径为基础与其他路径进行比较,找到最短时间路径,如图2所示:
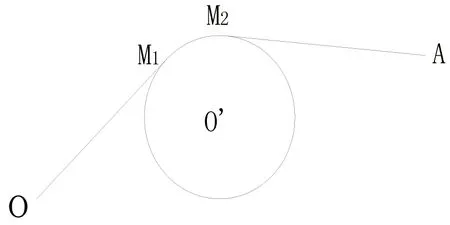
图2 最短时间线路图
综上,机器人的应用领域正不断扩大,种类日趋增多,性能不断提高,并逐步向智能化方向发展,追求目标是融入人类的生活,和人类一起协同工作,从事一些人类无法从事的工作,以更大的灵活性给人类社会带来更多的价值。
[1]谢云荪,张志让.数学实验.北京:科学出版社,1999.
[2]吴建国.数学建模案例精编.北京:中国水利水电出版社,2005.
TP242;O
A