不同公路景观对行驶轨迹和车辆转向的影响*
2016-11-29荀双杰熊坚陈瑶贾现广
荀双杰,熊坚,陈瑶,贾现广
(昆明理工大学交通工程学院,云南昆明 650500)
不同公路景观对行驶轨迹和车辆转向的影响*
荀双杰,熊坚,陈瑶,贾现广
(昆明理工大学交通工程学院,云南昆明 650500)
为研究不同公路景观对行驶轨迹和车辆转向的影响,运用驾驶模拟器模拟4种不同空间场景,随机选取30名有熟练驾驶经验的受试者,在同样的道路线形但空间围合程度不同的4种场景中驾驶模拟器,获取方向盘转角、汽车坐标和道路中线坐标等参数,运用数理统计方法对其进行相关性分析。结果表明,汽车在全封闭空间景观下,方向盘转角和行驶轨迹的波动情况最小,驾驶员的驾驶稳定性最好;在全开敞空间景观下,方向盘转角和行驶轨迹波动最大,驾驶员的驾驶稳定性最差。
交通安全;公路景观;行驶轨迹;方向盘转角
1 公路景观与交通安全浅析
在道路交通系统中,驾驶员虽是影响道路交通安全最为活跃的因素,但就驾驶过程而言,驾驶员的任何主动行为都时刻受到车辆、道路环境因素的制约(见图1)。驾驶员采取怎样的驾驶行为,主要依据其通过视觉、运动感觉等获得的信息来判断,其获取的信息80%以上来自于视觉,而公路两侧的景观给驾驶员提供了最直接的视觉信息。不良的道路景观空间设计会影响驾驶人的心理状态,导致其发生疲劳或警觉水平降低,影响车辆的行驶轨迹和转向,从而威胁行车安全。因此,开展公路景观对车辆行驶轨迹和转向的研究对景观设计和行车安全具有重要意义。由于用数学模型描述驾驶员的操纵行为非常困难,而利用基于虚拟现实技术构建的虚拟驾驶实验平台可以在实验室环境中进行车辆行驶轨迹和转向研究,让驾驶员直接参与实验验证,提高仿真实验的真实性。该文运用驾驶模拟器分析公路景观对行驶轨迹和车辆转向的影响。
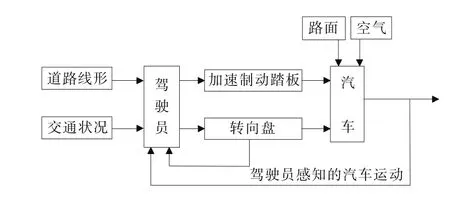
图1 驾驶员-车辆-环境闭环系统
2 实验设计
实验在昆明理工大学道路交通驾驶模拟实验系统平台上完成(见图2)。该实验系统包括真实的、设计中的或用于特殊实验的场景,并能通过对驾驶车辆、交通车流、行人动态参数和其他环境因素有条件的控制,在实验平台上实现对各类道路交通问题的动态信息采集、参数分析和仿真实验。

图2 KMRTS驾驶模拟系统平台
实验以云南省小磨路为研究对象,以其中K109 +600—K122+024为样本路段建立三维虚拟实验道路(见图3),在此基础上根据不同空间围合度构建全开敞、半开敞、单侧半开敞、全封闭景观4种不同实验场景(见图4)。以上4种空间道路线形(直道、弯道)完全相同,只是围合程度不同。应用全比例实车驾驶模拟系统实验平台进行每组不低于30名的受试者实验,受试者操作KMRTS驾驶模拟器在同样的道路线形但空间围合程度不同的4种场景中行驶,通过KMRTS驾驶模拟系统平台记录方向盘转角、汽车坐标和道路中线坐标等参数,然后对实验过程和数据进行现场采集和统计分析。
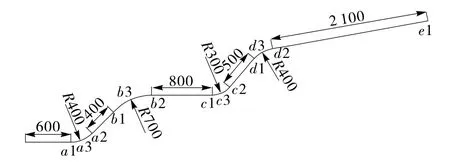
图3 实验公路设计(单位:m)
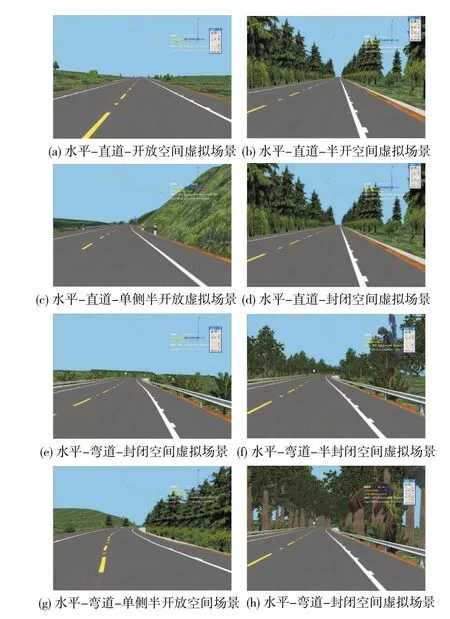
图4 实验场景设计
3 数据分析
3.1方向盘转角
方向盘转角大小代表汽车的稳定程度。各种力对汽车的干扰将引起轮胎侧偏,使汽车偏离行驶方向。为保证正常行驶,驾驶员要随时调整方向盘控制汽车以抵御外力的影响。对不同道路线形、不同空间景观下的方向盘转角进行统计分析,负数代表左打方向盘,正数代表右打方向盘。方向盘转角的标准差表示方向盘转角的变化情况,方向盘转角标准差越大,说明方向盘转角变化越大,驾驶员的方向操纵稳定性越差;方向盘转角标准差越小,说明方向盘转角变化越小,驾驶员的方向操纵稳定性越好。
3.1.1直线路段
直线路段不同空间景观下方向盘转角统计见表1,方向盘转角偏差见图5。
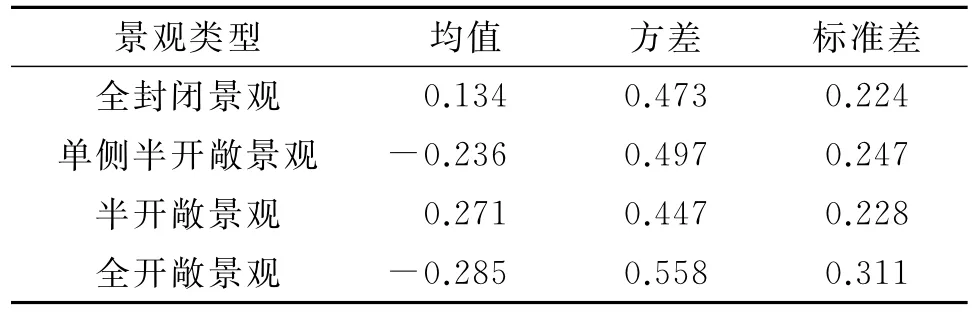
表1 直线路段不同空间景观下方向盘转角统计rad
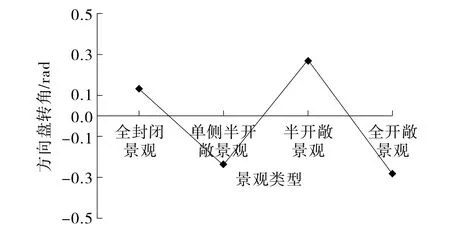
图5 直线路段不同空间景观下方向盘转角偏差
由图5可知:全封闭景观下方向盘转角偏差最小,全开敞景观下方向盘转角偏差最大,单侧半开敞景观与半开敞景观的方向盘转角相差不大。
图5虽然可以显示各景观下方向盘转角偏差均值的不同,但不能确定总体是否有差异。为分析总体差异情况,对两两景观之间进行差异性分析,结果见表2。
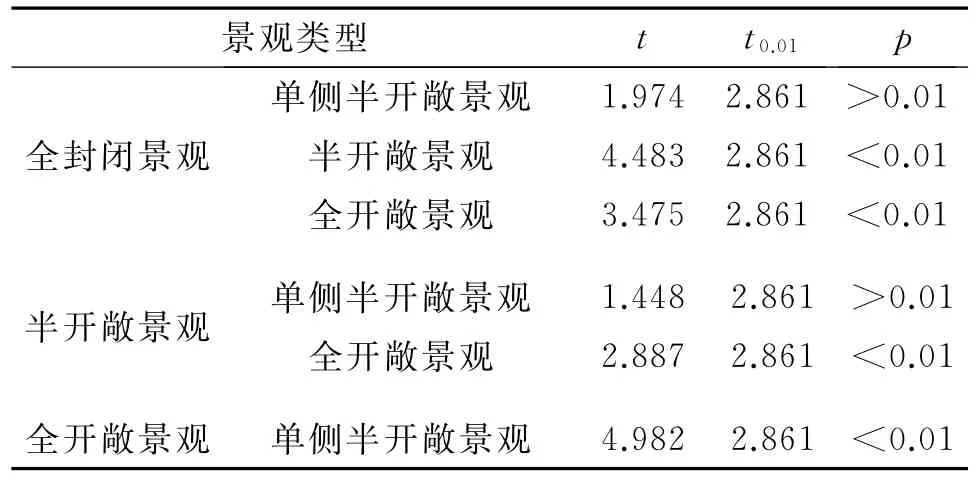
表2 直线路段不同空间景观下方向盘转角偏差差异性分析
由表2可知:当显著性水平为0.01时,全封闭景观与半开敞、全开敞景观有显著性差异,半开敞景观与全开敞景观有显著性差异,单侧半开敞景观与全开敞景观有显著性差异。
3.1.2弯道路段
由于弯道路段分为左转和右转,方向盘的取值会出现正负,为计算简便,方向盘转角均取正数。弯道路段不同空间景观下方向盘转角统计见表3,方向盘转角偏差见图6。
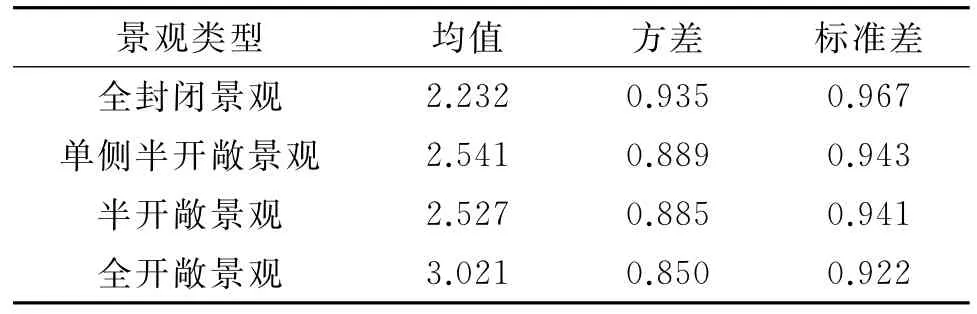
表3 弯道路段不同空间景观下方向盘转角统计rad
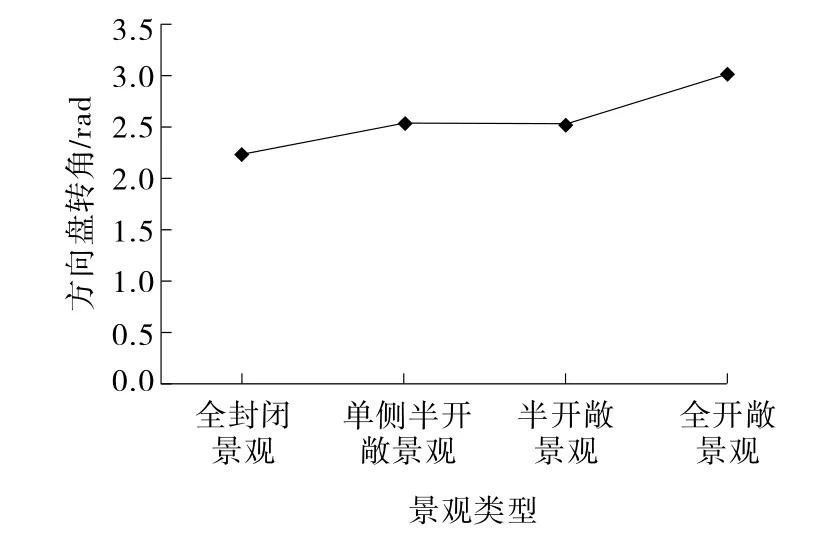
图6 弯道路段不同空间景观下方向盘转角偏差
由图6可知:弯道路段方向盘转角的变化规律与直线路段相同,即全封闭景观下方向盘转角偏差最小,全开敞景观下方向盘转角偏差最大,单侧半开敞景观与半开敞景观的方向盘转角相差不大。与直线路段相比,弯道路段方向盘转角均值大且离散程度小,这是因为汽车转弯时方向盘转动角度较直线时大,且在弯道路段驾驶员受道路线形和围合程度的影响视野较窄,注意力集中,故驾驶较稳定。两两景观之间的差异性分析结果见表4。
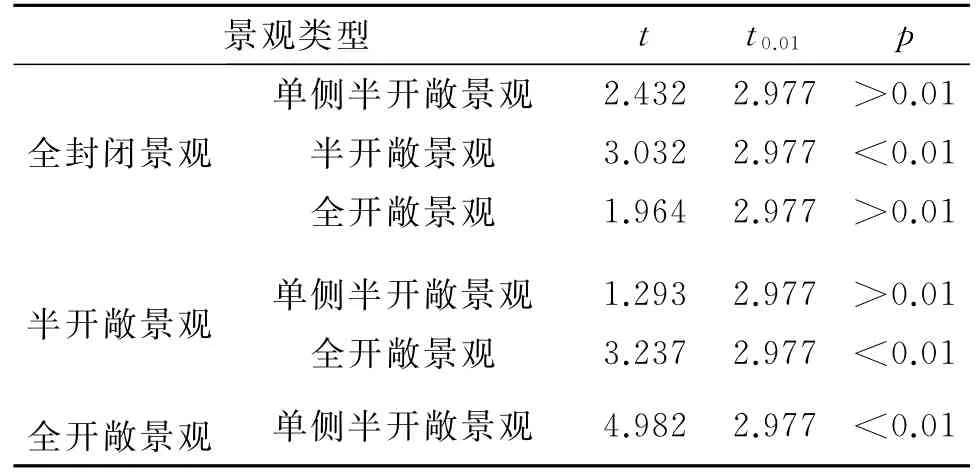
表4 弯道路段不同空间景观下方向盘转角偏差差异性分析
由表4可知:当显著性水平为0.01时,全封闭景观与半开敞景观有显著性差异,半开敞景观与全开敞景观有显著性差异,全开敞景观与单侧半开敞景观有显著性差异。
3.2轨迹偏差
轨迹偏差是指车辆运行轨迹偏离车道中心线的距离。行车轨迹和车速一样,是道路交通系统各要素作用于驾驶行为上的一种表现形式,也是评价道路景观设计舒适性和安全性的重要指标。下面对实验场景中没有中央隔离带的双向车道的直线和弯道路段行驶轨迹偏差进行分析。
把实验数据经转换处理后得到的基于道路里程桩号的车辆所在位置坐标与基于道路里程桩号的车道中线坐标进行吻合程度对比,得到轨迹偏差计算模型如下:

式中:D(l)为偏差距离;S( r,y,z,l)为汽车的坐标位置;R( r,y,z,l)为车道中线坐标;l为车道中桩坐标。
通过前面对车辆动态参数数据的转换处理及偏差计算,得到每个受试者在实验过程中驾车行驶时的基于道路里程桩号的轨迹偏差。把所有20名受试者对应于道路里程桩号的轨迹偏差取平均值,得到基于里程桩号的轨迹偏差。
行驶轨迹标准差表示车辆偏离中心线的变化情况,行驶轨迹标准差越大,说明驾驶员行车时偏离道路中心线越远,驾驶员的方向操纵稳定性越差;行驶轨迹标准差越小,说明驾驶员行车时偏离道路中心线越小,驾驶员的方向操纵稳定性越好。
3.2.1直线路段
直线路段不同空间景观下行驶轨迹偏差见表5,轨迹偏差误差见图7。
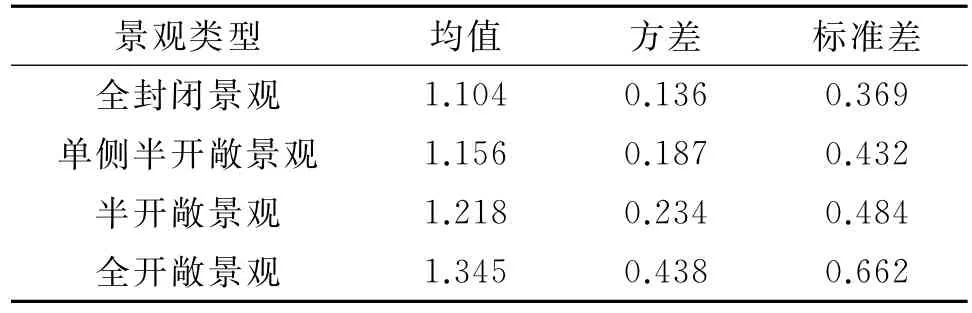
表5 直线路段不同空间景观下的行驶轨迹偏差m
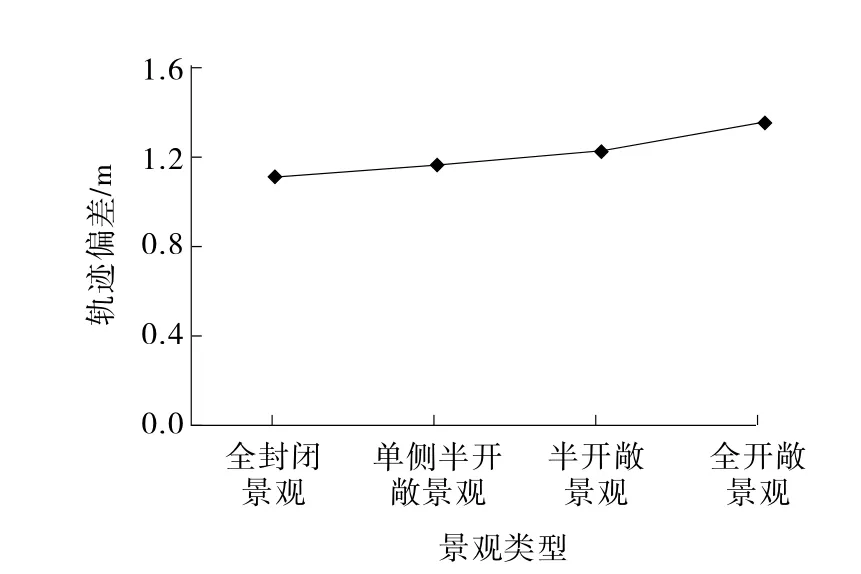
图7 直线路段不同空间景观下的行驶轨迹偏差误差
由图7可知:直线路段全开敞景观空间下横向轨迹偏差均值最大且离散程度最大,全封闭景观空间下横向轨迹偏差均值最小且离散程度最小。两两景观之间的差异性分析结果见表6。
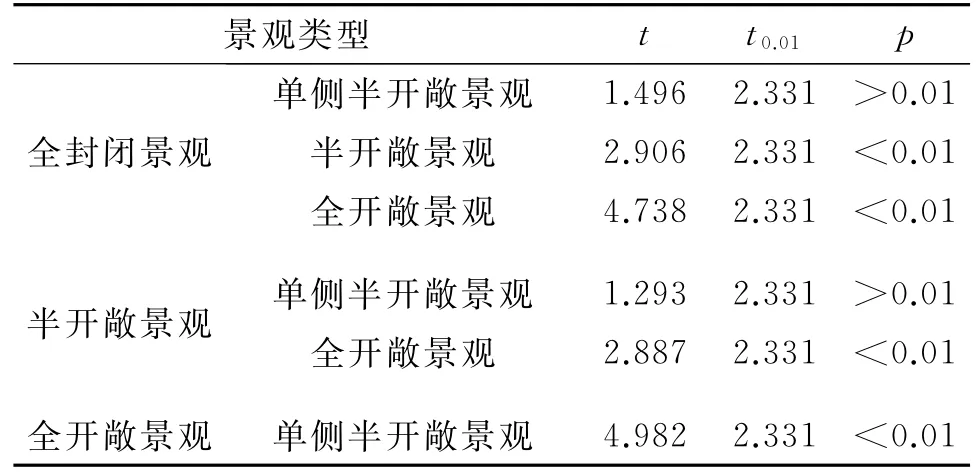
表6 直线路段不同空间景观下行驶轨迹偏差差异性分析
由表6可知:当显著性水平为0.01时,全封闭景观与半开敞景观、全开敞景观有显著性差异,半开敞景观与全开敞景观有显著性差异,全开敞景观与单侧半开敞景观有显著性差异。
3.2.2弯道路段
弯道路段不同空间景观下行驶轨迹偏差见表7,轨迹偏差误差见图8。
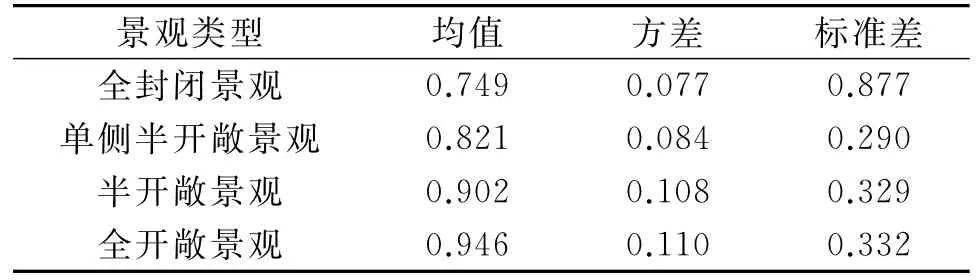
表7 弯道路段不同空间景观下的行驶轨迹偏差m
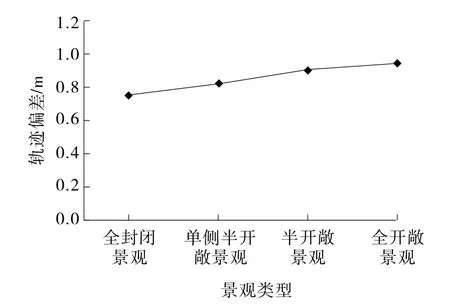
图8 弯道路段不同空间景观下的行驶轨迹偏差误差
由图8可知:与直线路段车辆轨迹偏差相比,弯道路段车辆轨迹偏差受景观空间影响小,各景观空间下轨迹偏差均值较小。这可能是因为在直线路段行驶时驾驶员不受道路线形的影响视野较开阔,注意力较分散;而在弯道路段驾驶员受道路线形和景观空间的影响,视野较窄,注意力较集中,驾驶较谨慎,缩小了景观空间轨迹偏差的差异。两两景观之间的差异性分析结果见表8。
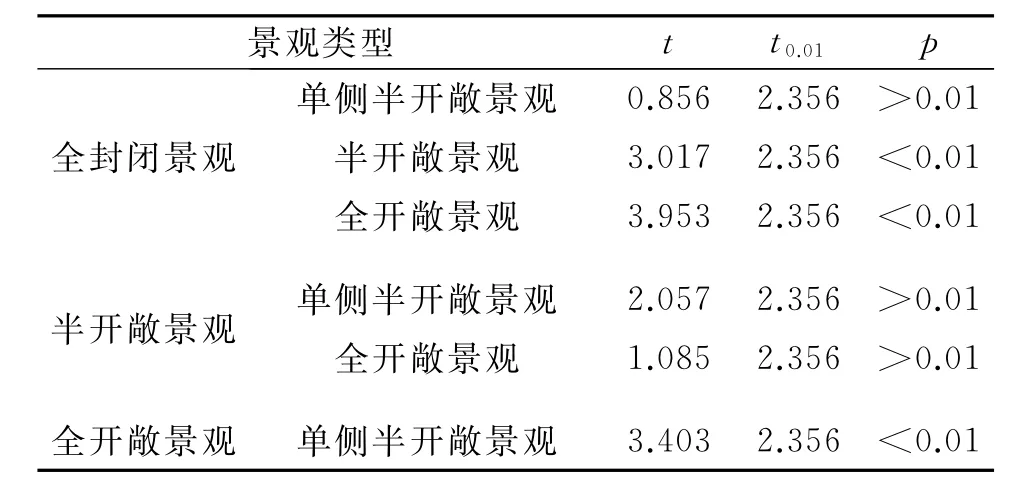
表8 弯道路段不同空间景观下行驶轨迹偏差差异性分析
由表8可知:在显著性水平为0.01时,全封闭景观与半开敞景观、全开敞景观有显著性差异,全开敞景观与单侧半开敞景观有显著性差异。
4 结论
该文以小磨路为研究对象,以实现道路景观设计的“安全可控”为根本目标,综合考虑驾驶员、车辆及道路(环境)三者之间的相互作用机理,采用计算机仿真和实验研究相结合的手段开展公路景观与车辆转向和行驶轨迹的关系研究,得到了不同公路景观对行驶轨迹和车辆转向的影响规律。结论如下:汽车在全封闭空间景观下,方向盘转角和行驶轨迹的波动情况最小,说明在该景观下驾驶员的驾驶稳定性最好;而在全开敞空间景观下,方向盘转角和行驶轨迹波动最大,说明在该景观下驾驶员的驾驶稳定性最差。
[1] 郭忠印,方守恩.道路安全工程[M].北京:人民交通出版社,2003.
[2] 刘翰东.汽车操纵稳定性的评价与试验[J].客车技术与研究,2008(4).
[3] 俞孔坚.景观、文化、生态与感知[M].北京:科学出版社,1998.
[4] 吴绍,斌李剑,峰高利.车辆稳定性控制的虚拟实验[J].农业机械学报,2008,39(5).
[5] 陈振日.对汽车操纵稳定性现行评价指标的分析与建议[J].汽车技术,2006(9).
[6] 肖将,秦雅琴,王圆圆,等.基于驾驶模拟实验的驾驶员气质与驾驶行为关系研究[J].人类工效学,2014,20(5).
[7] 林雨,方守恩.双车道公路弯道行车轨迹特性研究[D].上海:同济大学,2009.
U491.2
A
1671-2668(2016)05-0053-04
国家自然科学基金资助项目(71261012);云南省交通运输厅科技计划项目(2010(A)16-a)
2016-04-25
