无位置传感器控制下的永磁同步电机在线参数辨识
2016-11-28张红
张 红
(广州铁路职业技术学院,广州 510430)
无位置传感器控制下的永磁同步电机在线参数辨识
张 红
(广州铁路职业技术学院,广州 510430)
针对永磁同步电机的参数辨识需求,采用模型参考自适应算法对电机的交直轴电感和永磁体磁链进行在线辨识。该方法将q轴电流方程作为参考模型,根据Popov稳定性理论推导出自适应律。辨识过程中需要用到转子位置,为此提出一种改进的脉振高频注入法对转子位置进行估计,该方法省去了带通滤波器,从而节省了运算资源。仿真和实验结果均表明,改进算法能够准确估计转子位置,在此基础上辨识的电机参数也能迅速收敛到真实值附近。
永磁同步电机;电机参数辨识;无传感器控制
0 引 言
永磁同步电机(以下简称PMSM)具有磁通密度大、体积小的优点,近年来应用越来越广泛,其矢量控制受到各国学者的关注。
在PMSM的矢量控制系统中,控制器、观测器的设计都需要知道准确的电机参数,而电机参数是变化的且不方便测量,因此许多学者对其在线辨识作了研究。常用的PMSM在线参数辨识的方法包括扩展卡尔曼滤波、状态观测器法、最小二乘法等[1-4]。其中扩展卡尔曼滤波等方法因为大量的矩阵运算对控制芯片提出了较高的处理能力要求,相比之下,模型参考自适应算法简单、鲁棒性强。
PMSM在线参数辨识的过程中需要用到转子位置。在一些应用场合下,由于成本、环境等限制无法安装机械传感器,此时无传感器算法可以用来估算电机的转子位置。PMSM的无位置传感器算法有两种:第一种是基于反电势模型的算法[5-6],该类算法的估计性能对电机参数的准确性比较敏感;第二种是高频注入类算法[7-8],这类算法的估计结果不会受到电机电气参数准确性的影响,且低速时能维持较好的估计效果。
无位置传感器运行下的PMSM电机参数在线辨识有着十分广泛的应用前景,是近年来的研究热点[9-10]。但目前的文献中大都采用基于反电势模型的算法来估计转子位置,使得转子位置估计算法和电机参数辨识算法耦合在一起,影响彼此的性能。
本文提出一种无位置传感器控制下的PMSM在线参数辨识方案。通过一种改进的脉振高频注入算法对转子位置进行估计,其估计性能不受电机参数准确性的影响,实现了转子位置估计算法和电机参数辨识算法的相互独立。在此基础上采用模型参考自适应系统对难以测量的交直轴电感和永磁体磁链进行在线辨识。整个方案简单且易于实现,占用资源少。最后,分别利用MATLAB/Simulink仿真和基于定点DSP的实验平台对该方法的有效性进行了验证。
1 PMSM在线参数辨识
模型参考自适应方法基于稳定性设计,具有鲁棒性好、实用性强的优点,在参数辨识中被广泛使用。在PMSM的电机参数中,定子电阻Rs可以方便地利用电表测量出来,而交直轴电感Ld,Lq和永磁体磁链ψr则不便测量,本文的在线辨识即是针对Ld,Lq和ψr。
PMSM在d,q坐标系下的定子电压方程:
式中:ud,uq和id,iq分别为d,q轴的定子电压和电流;ωr为电机的电转速;p为微分算子。
从式(1)可以得到PMSM的q轴电流方程:
(2)
(3)
将式(3)作为参考模型,设计可调模型如下:
(4)
(5)

根据Popov超稳定理论得到如下Popov不等式:
(6)
由Popov不等式逆向求解得到如下自适应律(推导从略):
(7)
式中:p为微分算子。
进而得到:
(8)
式(7)所示的自适应律能够保证误差eq逐渐收敛到零,从而保证模型参数Ld,Lq和ψr也能收敛到真实值。
2 转子位置的获取
在参数辨识的过程中,ud,uq分别是两个电流控制器的输出,即利用d,q轴电压给定值作为真实值,在忽略逆变器非线性因素时误差很小;id,iq是由三相电流的测量值经过坐标变换得到的,转子位置信息不准确会导致变换后的id,iq包含误差,进而影响参数辨识的精度。
PMSM的无传感器位置估计算法大多是基于反电势模型的,但这类算法涉及到电机参数,在和参数辨识结合的时候会相互影响性能。因此本文选择高频注入算法来获取转子的位置。
高频下的电机模型由式(1)简化:
(9)

脉振高频注入是在估计的旋转坐标系中注入信号:
(10)
式中:Uh为注入信号幅值,ωh表示注入信号的角速度,fh是其对应的注入频率。
(11)


图1 脉振高频注入法位置跟踪过程

事实上,只要LPF的截止频率选择合适,便可以直接将iswitch,itorque和iharmonics的影响消除掉,此时BPF可以省掉,具体推导如下。
(12)
式中:itorque用于产生转矩,一般是直流;iswitch的频率是开关频率fs;iharmonics的频率是5~11倍的基波频率,即(5~11)f0。
从而,
(13)
(14)
式(14)所示的误差信号经过软件锁相环之后便可以得到转子位置,如图2所示。
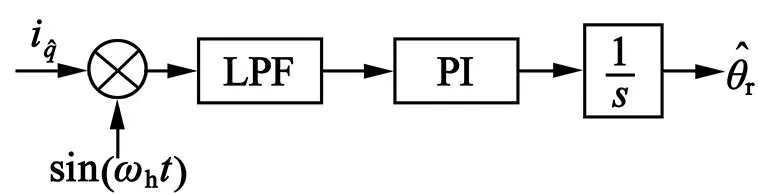
图2 改进高频注入法位置跟踪过程
从图2和图1的对比中可以看出,改进后的高频注入法省去了BPF,从而避免了由数字滤波器带来的舍入误差和相位变化,同时减小了算法的运算量,这在低性能的定点处理器上是十分有利的。
3 仿真和实验验证
为了验证上述无传感器控制下PMSM在线参数辨识方案的有效性,分别在基于MATLAB/Simulink的仿真平台和基于定点DSP的实验平台上搭建了PMSM的控制系统。图3为整个控制和辨识方案的框图。

图3 无传感器控制下PMSM参数辨识系统框图
电机参数如下:额定电压24V,额定功率0.3kW,极对数3,定子电阻0.6Ω,d轴电感6.8mH,q轴电感17.2mH,永磁体磁链0.117Wb,转动惯量1.2×10-3kg·m2。在转子位置估计模块中,注入的高频电压频率为500Hz,注入信号幅值为母线电压的3%,图2中所示的低通滤波器截止频率为50Hz。在参数辨识模块中,检测到的id,iq先经过了低通滤波器以滤除注入的高频分量,避免高频分量在辨识结果中造成误差。辨识过程中定子电阻Rs视为已知且恒定的。
3.1 仿真结果

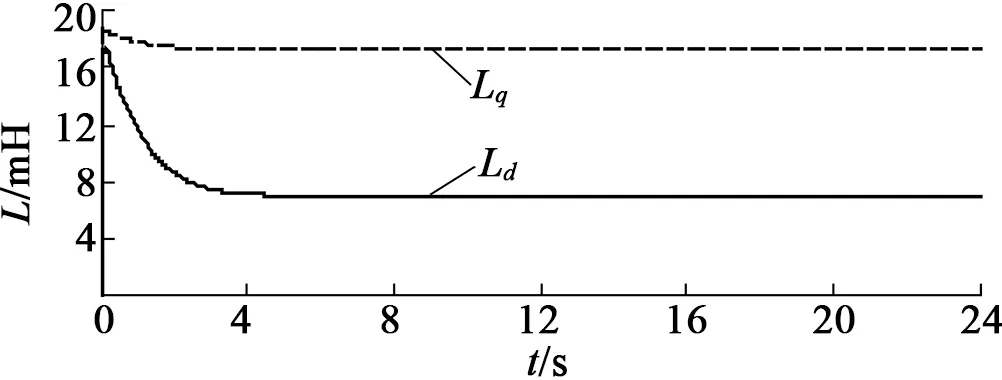
(a) 电感估计曲线
(b) 磁链估计曲线
图4 仿真结果
从图4可以看到,无论是电感Ld,Lq还是永磁体磁链ψr,都可以收敛到真实值,其误差几乎为0。

3.2 实验结果
本文搭建的实验平台采用ST公司的低成本32位定点处理器STM32F030作为控制芯片,系统时钟设为48MHz,功率模块的开关频率设为8kHz。
PMSM运行在200r/min,无传感器位置估计性能和在线参数辨识性能如图5所示。
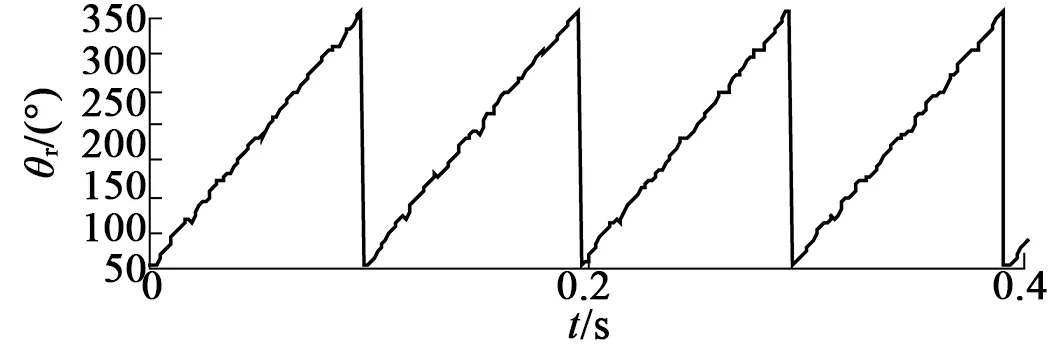
(a) 改进高频注入法转子位置估计结果
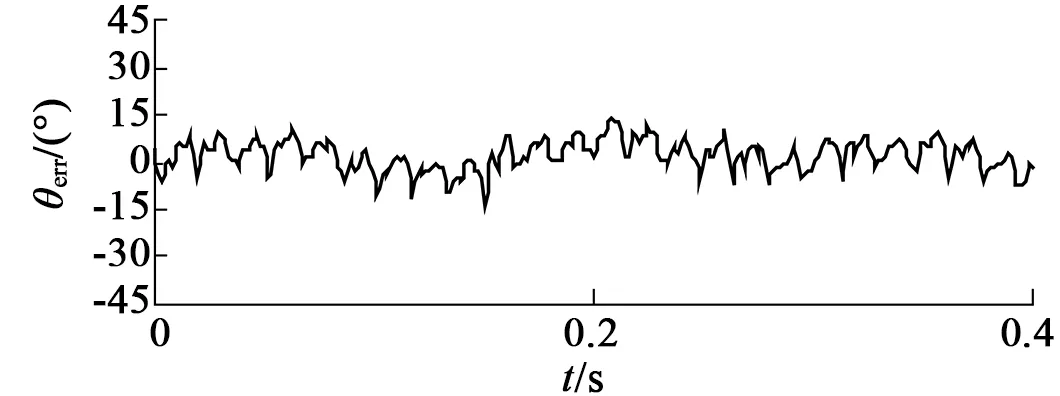
(b) 改进高频注入法转子位置估计误差

(c) 电感估计曲线

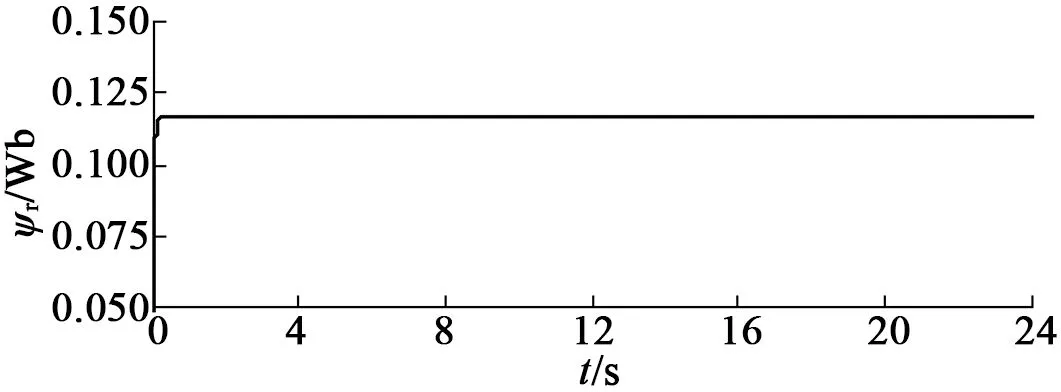
(d) 磁链估计曲线
图5 实验结果
从图5(a)和图5(b)可以看到,转速稳定时,转子位置估计误差很小,不超过15°,而且误差平均值是零。因此,即使省去了带通滤波器,改进后的脉振高频注入法也还是有很好的转子位置估计性能,能够满足矢量控制和参数辨识的要求。
图5(c)、图5(d)和表1都描述了电机参数辨识的结果。可以看到,电感和磁链都很接近真实值,这表明式(7)所示的自适应律是有效的,同时也验证了本文提出的在无传感器控制下进行PMSM在线参数辨识的可行性和有效性。此外,参数辨识结果均存在误差,且Ld,Lq的辨识值偏小,ψr的辨识值偏大。经分析,误差产生原因是由于逆变器非线性导致的指令电压和输出电压不一致,后面的工作将进一步研究消除逆变器非线性的影响。
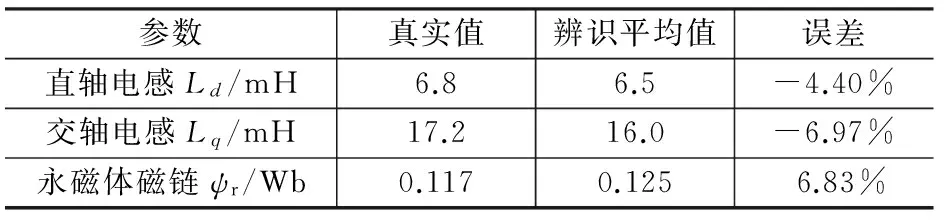
表1 参数辨识结果
4 结 语
针对PMSM的在线参数辨识,本文提出了一种无传感器控制下的永磁同步电机参数辨识方案。该方案利用模型参考自适应法实现了电感Ld,Lq和磁链ψr的辨识。以q轴电流方程为参考模型,设计自适应律来估计出模型参数,再从模型参数获得电气参数信息。在参数辨识中要用到转子的转速和位置信息,为了避免机械传感器带来的成本和安装问题,本文提出了一种改进的转子位置估计算法。改进算法在原有的脉振高频注入法的基础上省去了带通滤波器,理论分析了方法的可行性和滤波器的设计准则。最后,搭建了仿真和实验平台。结果表明,改进的高频注入算法有着良好的转子位置估计性能,稳态误差很小,在此基础上进行的在线参数辨识也收获了很好的辨识结果,辨识的电感和磁链都能够很快地收敛到真实值。
[1] KAN L,ZHU Z Q,QIAO Z,et al.Influence of nonideal voltage measurement on parameter estimation in permanent-magnet synchronous machines[J].IEEE Transactions on Industrial Electronics,2012,59(6):2438-2447.
[2] 陈振锋,钟彦儒,李洁.嵌入式永磁同步电机自适应在线参数辨识[J].电机与控制学报,2010,14(4):9-13.
[3] 肖曦,许青松,王雅婷,等.基于遗传算法的内埋式永磁同步电机参数辨识方法[J].电工技术学报,2014,29(3):21-26.
[4] INOUE Y,KAWAGUCHI Y,MORIMOTO S,et al.Performance improvement of sensorless IPMSM drives in a low-speed region using online parameter identification[J].IEEE Transactions on,Industry Applications,2011,47(2):798-804.
[5] SMIDL V,PEROUTKA Z.Reduced-order square-root EKF for sensorless control of PMSM drives[C]//Conference of the IEEE Industrial Electronics Society.IEEE,2011:2000-2005.
[6] MISHRA A,MAHAJAN V,AGARWAL P,et al.MRAS based estimation of speed in sensorless PMSM drive[C]//Power India Conference.IEEE,2012:1-5.
[7] 贾洪平,贺益康.基于高频注入法的永磁同步电动机转子初始位置检测研究[J].中国电机工程学报,2007,27(15):15-20.
[8] JANG J,SUL S,HA J,et al.Sensorless drive of surface-mounted permanent-magnet motor by high-frequency signal injection based on magnetic saliency[J].IEEE Transactions on Industry Applications,2003,39(4):1031-1039.
[9] 史宇超,孙凯,马鸿雁,等.内埋式永磁同步电机永磁磁链的在线辨识[J].电工技术学报,2011,26(9):48-53.
[10] SHI Y,SUN K,MA H,et al.Permanent magnet flux identification of IPMSM based on EKF with speed sensorless control[C]//Conference of the IEEE Industrial Electronics Society.IEEE,2010:2252-2257.
Online Parameter Estimation for PMSM with Position Sensorless Control
ZHANGHong
(Guangzhou Railway Polytechnic,Guangzhou 510430,China)
Targeting at the need of parameter identification for permanent magnet synchronous motor, the model reference adaptive method was utilized to online identify the inductances and the permanent magnet flux. Theq-axis current equation was referred as reference model, and the adaptation law was deduced on the basis of Popov stability theory. Rotor position is needed in the identification process, thus a modified pulsating injection method was proposed to estimate the rotor position. The band-pass filter was omitted from the modified scheme and the computation resource was saved. Simulation and experimental results show that the modified method can precisely estimate the rotor position, and the parameter identification results can converge to the true values rapidly.
permanent magnet synchronous motor (PMSM); motor parameter identification; sensorless control
2015-12-29
TM351
A
1004-7018(2016)06-0066-04
张红(1967-),女,硕士,副教授,研究方向为电工新技术、控制理论与控制工程。