考虑激磁电感变化的感应电机模型
2016-11-28陈国强刘和平
陈国强,刘和平,刘 庆,周 奇
(1.重庆大学,重庆 400044;2.重庆赛力盟电机有限责任公司,重庆 400030)
考虑激磁电感变化的感应电机模型
陈国强1,刘和平1,刘 庆1,周 奇2
(1.重庆大学,重庆 400044;2.重庆赛力盟电机有限责任公司,重庆 400030)
从电机的固有模型出发,根据其固定参数电机模型在αβ坐标系中的状态方程,结合激磁电感变化对电机性能的影响,推导了参数可变的感应电机模型。通过MATLAB/Simulink仿真分析激磁电感变化对感应电机性能的影响,在Ansoft软件平台上对额定功率为10 kW的三相感应电机进行有限元计算分析,得到激磁电感随电压、频率变化的关系曲线。再将激磁电感实时变化值用到参数可变的电机模型中,用矢量控制算法进行试验验证。结果表明,提出的参数可变化模型是可行的,得到的矢量控制算法可以提高感应电机控制性能,研究成果可为高精度感应电机模型的建立奠定基础。
电机参数;电机模型;激磁电感;矢量控制
0 引 言
为解决燃油汽车所带来的能源问题和环境问题,急需一种节能、污染少的新型交通工具,因此靠电力驱动的电动车应运而生。感应电机具有结构简单、价格低廉、可靠性高、数学模型易获得等优点,满足于电动汽车的控制,所以感应电机在电动汽车的应用越来越广泛。目前大量文献都是对感应电机的控制策略进行研究[1-2],但是往往忽略了电机参数变化对控制性能的影响,而好的控制策略是以精确的数学模型为基础的,所以研究控制策略之前应该把某些重要因素对电机参数的影响进行考虑。高性能的控制非常依赖电机的动态数学模型,而动态数学模型具有非线性、多变量等特点[3],导致模型建立困难、前提假设条件较多,所以感应电机数学模型的建立就显得尤为重要。
MATLAB/Simulink是一种非常适合于对动态系统进行建模、仿真和分析的软件包,开发方式包括:① 用已有的模块和模型组合建模;② 用S-Function 模块编程构造。方式①移植性差,方式②更接近于数学表达,且参数的改变比较容易,可以通过程序的调试,分析参数变化对电机控制性能的影响。
随着电机的运行工况、电机内部铁心环境温度的改变,电机的定子电阻、转子电阻、定子漏感、转子漏感和激磁电感等参数也将发生变化。参数的改变会导致电机磁路饱和水平改变,这样会引起激磁电感改变[4],导致定转子的时间常数发生激烈的变化,进而影响电机的控制性能。在感应电机固有模型,即线性化数学模型中,通常认为激磁电感是恒定值,即使考虑磁饱和,也仅仅是将工作点处激磁电感的稳态饱和值代入模型中,认为激磁电感保持不变[5],但是随着运行工况的改变,电机饱和程度不同,使得激磁电感参数也随之改变。文献[6]把主磁通作为状态变量,但是其建立的状态方程也对电机参数有较强的依赖性。文献[7]提出的自定义PMSM模型,虽然可以在线修改电机参数,但其方法还是基于常规的线性化数学模型,没有考虑电机实际工作状态的参数变化,仍存在一定的局限性。文献[8]通过引入激磁电感系数实时修正电感值来描述电感的饱和特性,但该模型中电感参数与磁链角度息息相关,分析比较复杂。文献[9]也仅仅讨论了异步电机空载条件下激磁电感随压频比变化的规律,不适于工程应用。因此,提出一种参数可变的感应电机模型是非常有必要的。
本文利用MATLAB/Simulink模块,模拟仿真激磁电感变化对感应电机性能的影响;利用Ansoft软件对额定功率为10 kW的四极三相感应电机进行有限元计算,得到额定负载下感应电机激磁电感与定子电压和频率的非线性关系。将得到的激磁电感动态变化值作为输入变量导入电机模型,得到参数变化的感应电机模型。除此之外,在矢量控制系统中将激磁电感作为变量导入磁链观测器中,得到考虑激磁电感变化的矢量控制算法。最后对提出的数学模型进行实验验证,结果表明,本文的可变参数电机模型是可行的,得到的控制策略能为高精度感应电机模型的建立奠定基础。
1 感应电机参数变化
电动汽车对其电气动力系统的性能要求较高,要求电机控制系统具有动态响应快,鲁棒性好等特点。其感应电机具有多输入、多输出的特点,动态数学模型是一个多变量、高阶数、强耦合的非线性系统。对控制系统建模仿真是高性能电机控制中必不可少的阶段,MATLAB/Simulink因其功能强大,非常适合于对感应电机进行建模分析。在研究分析感应电动机数学模型的建立时,通常作以下假设[10]:
1) 不考虑空间谐波,三相绕组分布对称,且在空间互差2π/3的电角度,则三相绕组所产生的磁动势沿气隙按正弦规律分布;
2) 不考虑磁路饱和,则定转子各绕组的自感和互感都是不变的;
3) 不考虑铁心耗损;
4) 不考虑温度变化、频率变化引起的肌肤效应对定转子绕组电阻值的影响。
基于以上假设,常用的固定参数感应电机模型在αβ坐标系中的状态方程如下:
(1)

利用上述固有参数电机模型来对鼠笼式感应电机进行模拟仿真,保证仿真和实验的激励源、运行工况以及运行环境一致,把仿真数据与实验数据进行对比分析,发现仿真波形与实验波形有较大偏差,仿真模拟没有达到和实验数据相互验证的目的,说明仿真模型没有真实的反应实际情况。由式(1)分析可知,仿真常用的模块化电机模型有太多的假设条件,过于理想化。而电机实际运行的工况比较复杂,上述假设条件在实际情况中不满足,导致所建立的固定参数电机模型不适用。影响电机模型建立的参数有很多,比如定子漏感、转子漏感、定子电阻、转子电阻和激磁电感等,其现实物理模型,如图1所示。

图1 感应电机的物理模型
利用S-Function函数建立感应电机模型时,可以将电机实际运行工况下各个参数变化的函数曲线作为状态输入量,导入电机的模型,使得建立的电机模型尽可能的接近实际电机物理模型,如图2所示。

图2 参数可变的感应电机数学模型
由图2知,实时更新电机数学模型的各个参数,使得电流估计值is_e和转速估计值ne分别接近电流实际值is和转速实际值n,将估计值运用于电机控制算法中,可以得到较好的控制性能。这样得到的Simulink仿真模型还可以通过生成代码,直接用于控制台控制电机。
2 考虑激磁电感变化的感应电机状态模型
2.1 激磁电感对感应电机性能的影响
本文以一台额定功率为10 kW的鼠笼式感应电机为例进行分析,样机参数如表1所示。
表1 样机电阻电感参数
为方便分析,本文只考虑激磁电感变化对感应电机定子侧输出相电流的影响,即本文提出的参数可变感应电机模型,忽略了温度变化、涡流、铁心损耗以及漏磁通饱和[9]对电机参数的影响。下面用MATLAB仿真来说明激磁电感变化对电机性能的影响,如图3所示,额定负载TL=31.3 N·m,相电压有效值u=50 V,频率f=105 Hz时,待电机输出电流稳定后,激磁电感从额定值0.8 mH跳变到1.2 mH。
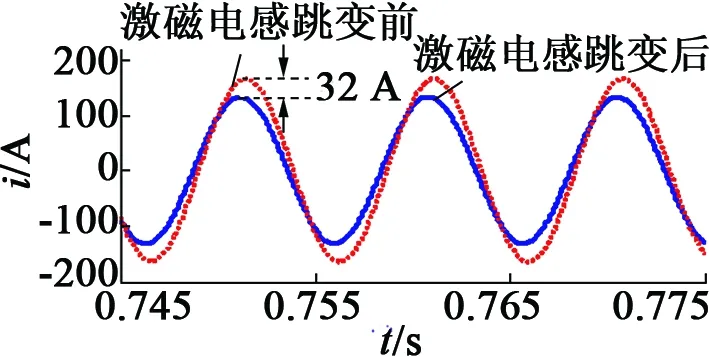
图3 激磁电感跳变时的A相电流
由图3可知,当激磁电感增大50%时,激磁电感跳变前后的电流输出值之差为32 A。控制策略需要足够精确的反馈信号,而定子电流作为电机控制中必不可少的反馈量,它的精确度好坏将严重影响电机的控制性能。所以用固定参数电机模型仿真得到的控制策略往往不能用于高性能的电机控制中。
2.2 考虑激磁电感变化的感应电机状态模型
考虑激磁电感变化的感应电机模型在αβ坐标系中的状态方程如下:
(2)
(3)
(4)
式(2)~式(6)中的激磁电感Lm是关于定子相电压u和频率f的函数。传统方式均认为激磁电感Lm是激磁电流im的函数,而im依赖于检测到的定子电流和转子电流,而这两个参数又难以获得,所以本文考虑激磁电感是定子相电压和频率的函数。利用Ansoft软件对感应电机进行有限元分析,当电动机温度为75°时,计算额定负载下不同电压u和频率f对应的激磁电感Lm,如图4所示。定义基频f=103Hz,在基频以下时,电机输出转矩恒定,通常为保持足够强的磁通并且充分利用铁心,使得激磁电感并非某个特定的饱和值,而是随着电压和频率的变化也在改变;在基频以上时,电机处于弱磁状态,输出功率基本不变,随着频率的增加,激磁电感基本不变。
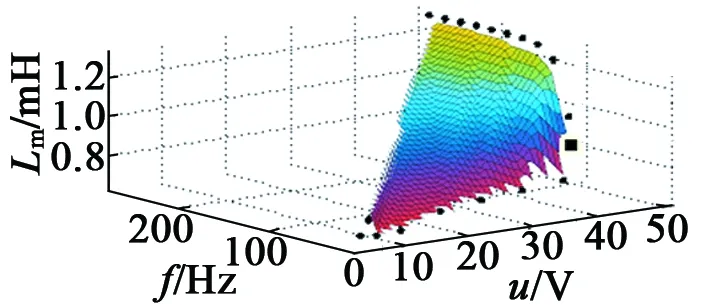
图4 激磁电感随相电压和频率变化关系图
由图4可知,f在87~120Hz范围内时,激磁电感的变化规律是非线性的,所以用一个线性值或饱和特定值作为激磁电感参数,将会对电机的控制性能造成很大的影响,有必要将激磁电感实时值提供给电机模型和相应的控制策略。
由Ansoft有限元计算结果分析,得到不同电压u和频率f下的激磁电感Lm,而异步电机的主磁路饱和特性可以用一条激磁电感跟随压频比变化的曲线进行描述[9],如下:
(7)
利用MATLAB/Curve Fitting Tool工具中的Nearest neighbor interpolant方法拟合出Lm关于u/f的关系曲线,如图5所示。
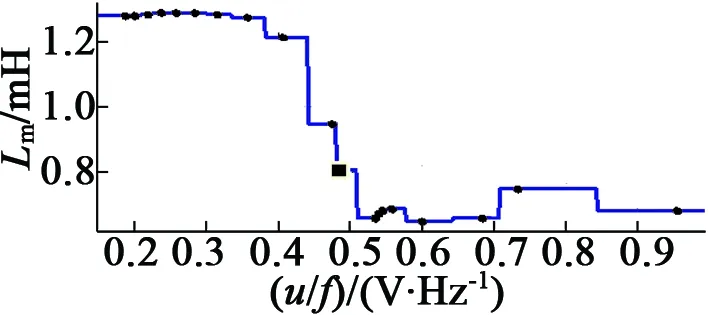
图5 Lm关于u/f的函数关系图
由图5可知,由于电机铁心磁饱和的影响,随着压频比的增大,激磁电感逐渐减小。本文的可变参数电机模型和其矢量控制算法中磁链观测器中的激磁电感实时值可以由图5所示的关系曲线得到。
3 实验验证
电机闭环控制能取得很好的控制性能,但要求精确采集定子电流作为反馈信号,且电流波形的好坏直接决定了电机的驱动性能的优劣。为简化控制,本文采用常用的有速度传感器矢量控制来验证上述设计方案,本文可变参数电机模型中激磁电感是关于定子A相相电压有效值和频率的函数,矢量控制算法考虑了激磁电感对磁链观测器的影响,其控制框图如图6所示,去掉虚线框部分即为传统的固定参数电机模型对应的矢量控制框图。
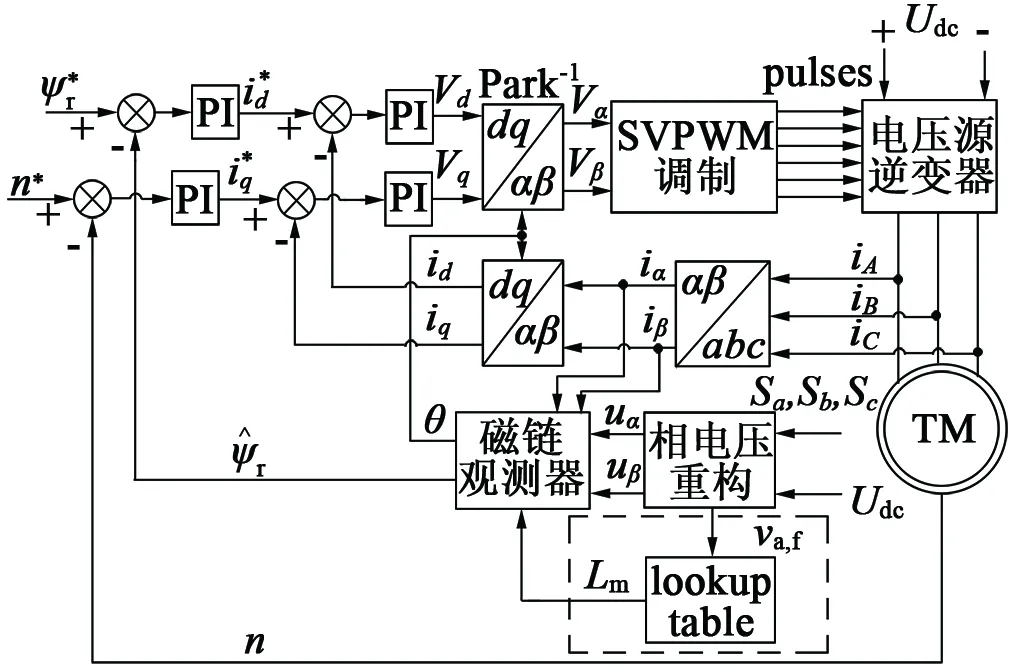
图6 矢量控制框图
如图6所示,在考虑激磁电感变化的可变参数电机模型的控制算法中,利用相电压重构技术得到定子侧A相相电压有效值ua和频率f,作为由Ansoft有限元分析得到的激磁电感曲线中的电压和频率,通过lookup table查表,即对照图5所示关系,得到激磁电感实时值,将其反馈到电压型或电流型磁链观测器中,构成激磁电感实时更新的闭环控制系统。分别对固定参数电机模型的控制系统和可变参数电机模型的控制系统进行理论推导,得到两个模型下不同矢量控制算法用于下面实验验证。
验证实验在三相感应电机驱动实验台上进行,对一台额定功率为10 kW的感应电机进行实验研究,控制实验台的实物及其连接情况如图7所示。
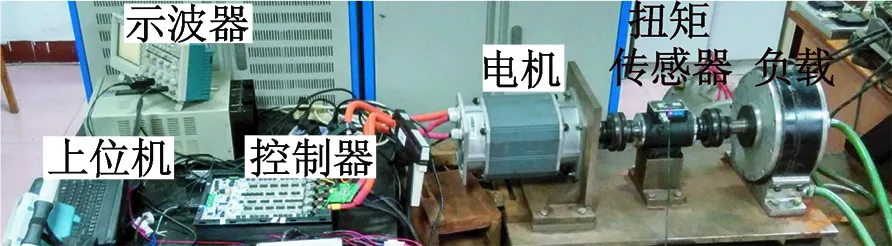
图7 实验台的实物图
实验台主要由电池组(72 V,200 Ah)、四极三相感应电机(10 kW,50 V,103 Hz)、控制器、磁粉加载器、示波器、数据采集卡和上位机等配套设备组成。实验样机参数如表1所示,控制器采用功能强大的DSP控制芯片TMS320F28035来实现控制算法,PWM开关频率为10 kHz,即系统控制周期为100 μs,死区时间为4 μs。

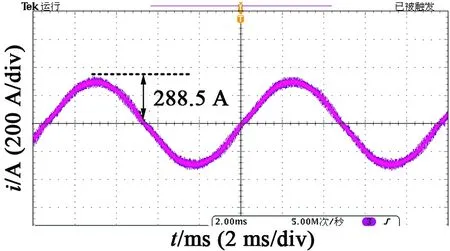
(a) 固定参数电机模型
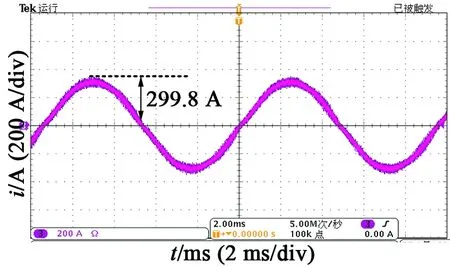
(b) 可变参数电机模型
由图8可以看出,两电流波形均为带高频谐波的正弦波,频率为105.4Hz和105.3Hz,可忽略差异,但幅值相差11.3A,且可变参数电机模型的相电流均方根标准差仅为3,远小于固定参数电机模型的相电流均方根标准差。可以看出,应用可变参数电机模型的矢量控制算法得到的实际电机输出电流波形比固定参数电机模型矢量控制算法得到的实际电机电流波形好,幅值更真实,且电流均方根值更稳定。所以参数可变的感应电机模型及其引起的矢量控制算法变化对提高感应电机控制性能十分必要。
4 结 语
本文首先通过固有参数的电机模型仿真数据与实验数据的对比,发现参数变化对电机模型的重要性,提出了参数可变化的电机模型。通过MATLAB/Simulink仿真分析激磁电感变化对感应电机性能的影响,利用Ansoft计算得到激磁电感随电压和频率变化的关系。把考虑激磁电感变化的电机模型运用于矢量控制算法,对参数可变化的感应电机模型进行了实验验证,结果表明本文模型正确性,为后续高精度感应电机模型的建立及控制提供了一种快速、有效的方法。
[1] 陈桂兰.交流异步电机无速度传感器矢量控制方法及其在电动汽车中的应用研究[D].北京:中国科学院研究生院,2005.
[2] 王庆义.交流变频驱动系统关键技术及应用研究 [D].武汉:华中科技大学,2008.
[3] 程启明,程尹曼,王映斐,等.交流电机控制策略的发展综述[J].电力系统保护与控制,2011,39 (9):145-154.
[4] 崔霆锐,张立伟.矢量控制异步电机参数敏感性仿真研究[J].计算机仿真,2014,31(7):187-192.
[5] 张代红,王明渝.磁饱和及参数变化对速度观测器精度的影响[J].重庆大学学报(自然科学版),2006,29(3):36-39.[6] HUANG Yingwei, CHAPARIHA M, THERRIEN F,et al.A constant-parameter voltage-behind-reactance synchronous machine model based on shifted-frequency analysis[J].IEEE Transactions on Energy Conversion,2015,30(2):761-771.
[7] 王莉娜,杨宗军.SIMULINK中PMSM模型的改进及在参数辨识中的应用[J].电机与控制学报,2012,16 (7):77-82.
[8] MOULAHOUM S,TOUHAMI O.An approach to an induction machine modeling in presence of saturation and iron loss[C]//2005 IEEE Power Engineering Society General Meeting.IEEE,2005:2272-2276.
[9] 王建渊,安少亮,李洁,等.考虑主磁路饱和与铁损的异步电机模型[J].电工技术学报,2010,25(10):44-50.
[10] 阮毅,陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2009:155-156.
Model of Induction Motor Considering the Variation of Magnetizing Inductance
CHENGuo-qiang1,LIUHe-ping1,LIUQing1,ZHOUQi2
(1.Chongqing University, Chongqing 400044, China;2.Chongqing Sailimeng Motor Limited Liability Company, Chongqing 400030, China)
Based on the intrinsic model of a motor, the induction motor model with variable parameters was derived, which combined with the influences of magnetizing inductance's variation on the performance of the motor, according to the fixed motor parameters in αβ coordinates equation of state. First, the effect of magnetizing inductance's changes on the performance of induction motor was simulated and analyzed with MATLAB/Simulink, and the finite element analysis was implemented in the three-phase induction motor with rated power of 10 kW to get the curve of magnetizing inductance's changes with voltage and frequency. Then, applying the magnetizing inductance's real-time changes in value to the motor model with variable parameters, the vector control algorithm was tested and verified. The results show that the proposed motor model with variable parameters is feasible and the vector control algorithm can improve the control performance of the induction motor. The research results can provide a basis for the establishment of the precise induction motor model.
motor parameter; motor model; magnetizing inductance; vector control
2015-10-28
TM346
A
1004-7018(2016)06-0023-04
陈国强(1990-),男,硕士研究生,研究方向为电力电子与电力传动。