管状电机的改进设计与转速分析
2016-11-28周锦添
周锦添
(广东工程职业技术学院,广州 510520)
管状电机的改进设计与转速分析
周锦添
(广东工程职业技术学院,广州 510520)
介绍了在研发过程中3种类型管状电机的主要性能参数,阐述了组成管状电机的旁磁制动电动机、三级行星齿轮减速器、机械双旋转行程定位记忆开关3个主要部件的结构特点,并总结了在研制过程中确定各零件所使用的各种材料。同时应用运动简图分析方法,确定3种管状电机速度的计算方法,指导管状电机生产厂家调整技术参数,以便用户获得精确的电机输出速度。
管状电机;鼠笼镶铸制动磁极;减速器;运动简图
0 引 言
近些年,管状电机的生产及应用在国内得到迅速发展,尤其在浙江、广东两省,产量累计每年几百万台,产品大部分以出口为主。管状电机在日常工作、生活中经常应用,在家庭中使用的窗卷帘,在办公场所中使用的投影屏幕,在智能家居中使用的卷闸门、遮阳棚等,这些产品均用到管状电机。它的主要功能就是为这些门窗、投影屏幕、卷闸门、遮阳棚等提供动力。此外,管状电机还有一个功能就是在提升或下降过程中,实现行程的自动定位及制动。现有管状电机主要存在行程定位不正确(俗称走位)、减速器噪声大(噪声值大于52 dB)、电机提升力矩和制动力较小、由于传统的结构设计原因导致的制造工艺复杂等技术缺陷。
1 管状电机总体构造及其技术参数
1.1 管状电机总体构造
管状电机从构造来看,实际就是由输出端的一台三级行星齿轮减速器、连接减速器的动力源旁磁制动单相异步电动机以及末端的精确定位的机械双向行程定位记忆开关3个主要部分组成,并依次内装在一根细长型的圆型钢管内,引出电源线后形成整体组合体。某35型管状电机产品实物如图1所示,其特点是结构紧凑、体积较小、转矩较大、噪声较小、隐蔽性好、使用方便。

图1 35型管状电机实物图
1.2 管状电机主要种类及其技术性能参数
目前在应用上主要有3种不同尺寸的管状电机,直径分别为Φ35 mm、Φ45 mm和Φ60 mm,以此命名为35型、45型和60型,其主要技术参数如表1所示。它们的输出扭矩、输出转速、功率、旋转最大定位计数圈数等主要参数各异。
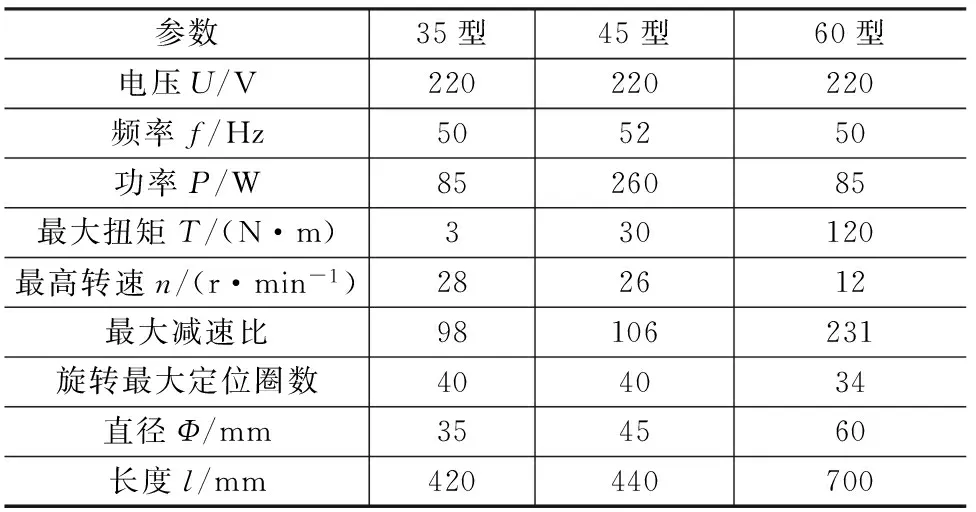
表1 3种型号管状电机主要技术参数
2 管状电机设计的新型结构
管状电机设计上有三大新型结构,分别为采用长型旁磁制动单相异步电机、高减速比三级行星齿轮减速器、机械双向旋转行程定位记忆开关。
2.1 采用长型旁磁制动单相异步电机设计[1]
由于中英文在语言形式、语序结构、表达方式等方面存在较多差异,而合同中又常常使用长句来使得语义更加明确,因此在翻译长句时,常常出现逻辑混乱、语意不明的情况。这是因为中文结构在形式上较为松散,主要靠语义衔接,而英文更重视严密的逻辑关系和形式上的连接。在进行英译汉长句处理时,则经常打破英文行文的原有顺序,进行形式调整,以追求中文译文的准确、自然、流畅。在这些操作中,稍有不慎,就可能出现语句逻辑不清晰甚至混乱,造成译文让人感到费解的情况。因此,复杂长句的处理需要反复斟酌,慎之又慎,把每个成分之间的关系彻底理清再开始翻译。
经过缜密调研和市场的需求分析,管状电机其中一部件均采用两极旁磁制动单相异步电动机,设计的三维图如图2所示。正反转速均为2 800 r/min,电机采用短时间歇工作制,最大连续工作时间为4 min,电动机定子绕组设计成主副绕组匝数相同。根据其应用场合短时工作、电动机频繁起动和大扭矩输出的工作特点,电动机容易过热,因此,电动机绝缘材料如漆包线、绝缘漆和绝缘槽纸等均采用F绝缘等级,定子绕组内还需埋装热保护器,防止绕组过热烧毁。

图2 旁磁制动单相异步电动机三维图
管状电机使用中频繁提升重物,为防止提升重物后物体坠落,设计必须采用制动结构,经过多个方案的比较,最终采用机构简单、成本低、制动可靠安全的内置式旁磁制动结构。这种制动形式为电磁失电弹簧张力制动式。制动原理为在通电后,电动机转动时,所产生的电磁力带动鼠笼转子及制动磁极转动,由于磁力吸合磁靴的作用,制动滑块克服了弹簧的张力,与制动磁极吸合,此时弹簧为压缩状态,制动滑块与刹车摩擦片不接触;但在电动机定子失电后,制动磁极和制动滑块之间的电磁吸力消失,制动滑块在弹簧的张力推动下向外移动,与刹车摩擦片接触,实现制动[2]。旁磁制动三维结构如图3所示,产品实物如图4所示。

图3 旁磁制动结构三维图
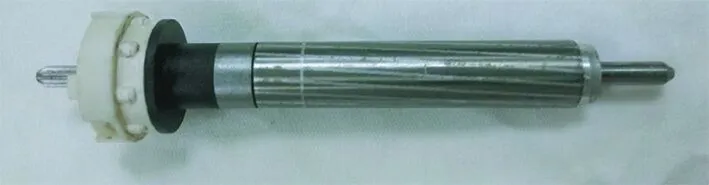
图4 旁磁制动结构实物图
制动磁极为圆盘状,分布着数个独立磁靴,定子铁心长度比鼠笼式转子铁心长度多出一个制动磁极距离。制动磁极与鼠笼式转子同时铸出,就在转子铁心比定子铁心短的这块区域,与鼠笼转子叠压在一起。而制动弹簧安装在鼠笼式铸铝转子与制动滑块之间,并套进电机轴处于转子中心处,在电机刹车制动时起提供制动张力的作用。制动磁极前方为制动滑块和刹车摩擦片,刹车摩擦片依靠固定座固定。
这种新型的制动结构,我们称之为转子鼠笼镶铸制动磁极。与传统制动磁极的制造方式不同,传统鼠笼转子铁心和制动磁极由两种不同材料制造,其中转子铁心用硅钢片、制动磁极用导磁性高的材料独自制造成磁靴,两者分别制造后再与制动弹簧等零件组装成一体。而这种创新机构的制动磁极直接采用转子铁心片叠加而成,并叠成磁极需要的一定长度,不再需要另外加工数个独立的磁靴,它是利用铁心片的转子槽分隔开的自身铁心片经过加工后作为独立的磁靴,在转子铁心片与磁极铁心片之间还需放置冲压而成的铝合金薄片,铝合金薄片铸造后熔成鼠笼转子的一端铝环,在镶铸时将转子铁心片、铝合金薄片和磁极铁心片依次用一支假轴通过各自中心孔组装成一体,并一道采用离心铸造方法铸成。最后,采用车削加工,把磁极铁心片内外连接的材料切除掉,这样磁极铁心片被加工成互不相连接的并由转子铁心槽分割开的小片,形成数个独立磁靴。独立磁靴切削加工前后比较图如图5所示。这种结构设计获得实用新型专利,它不需外置制动装置,旁磁磁场强度高,制动力大,结构简单,制造工艺特别简单,成本低,旁磁制动效果好。

图5 形成的独立磁靴切削前后比较图
2.2 采用高速比三级行星齿轮减速器的设计
以35型管状电机为例,经调研定型减速器主要性能参数:减速器输出转速为nout=28 r/min,传动转速比为i≈98,其输出最大转矩为T=3 N·m,外径Φ为34 mm。三维设计图如图6所示。
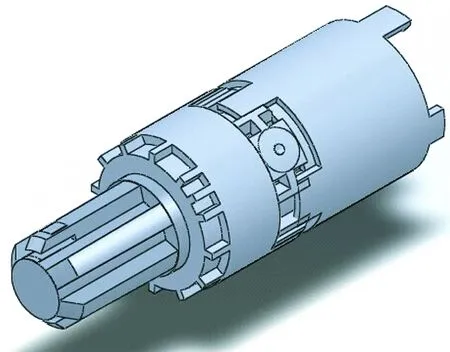
图6 行星齿轮减速器三维图
应用场合要求传动比大,承载能力强,结构紧凑,体积小,因此宜采用三级行星齿轮减速结构。根据行星齿轮传动的传动特点和型式,把一、二、三级行星轮系的传动比[3]初定分配为i1级∶i2级∶i3级=7∶3.5∶4。每一级行星齿系均为主动轮是太阳轮,内齿圈固定,从动是行星架的装置,因内齿圈固定,属于减速传动。这种减速器设计出行星架滑槽与行星齿轮转轴的向心滑槽创新结构,而不是采用已有技术行星架圆柱孔与行星轮圆柱轴的配合。这种结构设计与已有的设计不同,每一级行星架与行星轮轴的配合型式采用滑槽配合型式,即行星架加工出均匀分布的3条径向滑槽,而行星轮轴两端圆柱头铣削加工出对称扁形形状,这样使得安装着行星轮的行星轮轴就可以沿着径向在运转过程中自由浮动,补偿了由于加工尺寸精度误差引起的啮合间隙,能大幅降噪减震。内部结构三维图如图7所示。
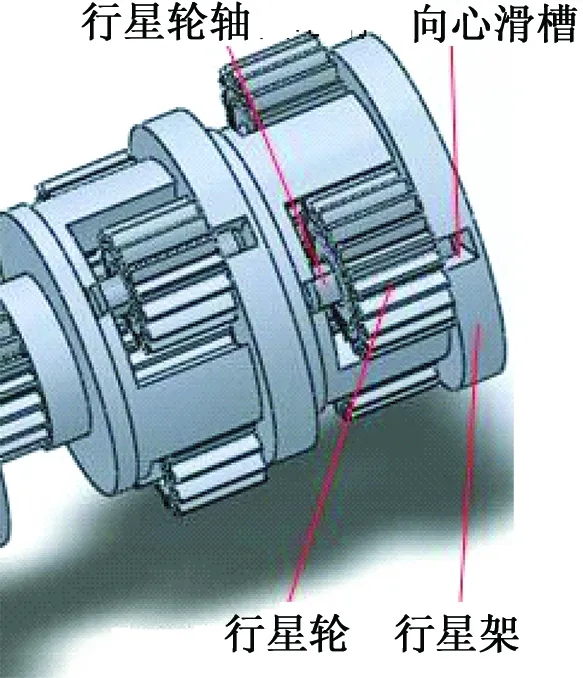
图7 行星架与行星齿轮转轴的向心滑槽创新结构三维图
这样的设计,对于各级的行星轮系来说,在各级行星架内的行星齿轮转轴处,设计出2个自由度、1个约束的径向向心滑槽创新结构。不再采用传统的1个自由度、2个约束的圆柱孔结构。各级行星齿轮的转轴均与相应的各级行星架的径向滑槽各自配合,并安装于各级行星架上,如图7所示。由于所有的行星齿轮转轴与行星架均采用了径向向心结构,转动时行星架能自动浮动,自动消除间隙,并校正偏心,补偿了尺寸误差,并减少了由于行星架偏垂、偏心产生的径向跳动,保证了运转精度,降低了运转噪声和振动,噪声测试低至42 dB。三级行星齿轮减速器三维爆炸图如图8所示。这种创新结构,获得了实用新型专利[4]。

图8 三级行星齿轮减速器三维爆炸图
2.3 采用专用机械双向旋转行程定位记忆开关设计
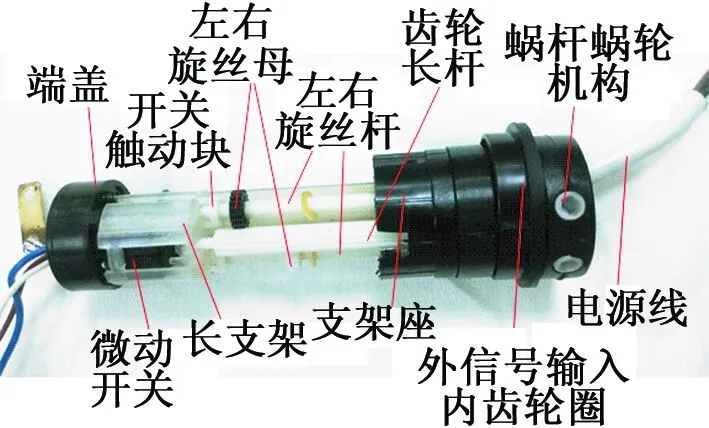
图9 行星齿轮减速器三维实体爆炸图
开关初次使用前的准备:将机械双向旋转行程定位记忆开关组装于管状电动内,并连接需管状电机驱动的产品圆筒上,将外信号输入内齿圈的凸键套装上圆筒末端的键槽上。接着调节电机端头上的两个蜗杆,旋动其中一个丝母,使其与其中一个开关触动块触碰,致使微动开关触头压下接通,另一个蜗杆也需调节,使其丝母旋至行程距离所需位置。
开关的动作流程:当接通电源电机转动后,圆筒就转动,利用凸键带动外信号输入内齿轮圈旋转,通过啮合驱动着两根齿轮杆转动,其上的左右旋丝母亦随之移动。由于两根左右旋向丝杆的螺旋方向相反,必然驱使两个左右旋丝母相背或相向移动。原先与触动块触动的丝母将后移,另一个丝母则前移。当另一个丝母前移至触动块并压住另一个微动开关触头时,电源切断,电机与圆筒停止转动。当电机再次启动后,由于控制线路改变,电机反转,圆筒又跟着转动,随后的开关动作如上述一样,如此循环,便可实现圆筒行程自动控制。在使用过程中,如需设置行程上限和下限的位置,只需分别调节蜗杆,调节两个丝母的相对纵向距离,就可控制卷帘上下位置。
这种新型双丝杆双向设计已获实用新型专利[5]。这种新型双丝杆比原有的单丝杆设计行程长,且开关体积小,能套进管状电机内部,并不需外接行程开关,具有隐蔽性好、行程调节容易、圆筒安装方便等优点,解决了现有单丝杆设计的功能缺陷。
2.4 管状电机零件所使用材料的特点
管状电机3个主要部件在选材上也与传统考虑不同,主要的3个部件旁磁制动单相异步电动机、三级行星齿轮减速器、机械双向旋转行程定位记忆开关所选用的材料多采用粉末冶金零件和强度较高耐高温的塑料。减速器初级行星轮首创采用了新型材料弹性体塑料,达到了降噪减震、寿命长的效果。经过试验,确定三主要部件的材料如表2~表4所示。

表2 三级行星齿轮减速器零件材料表
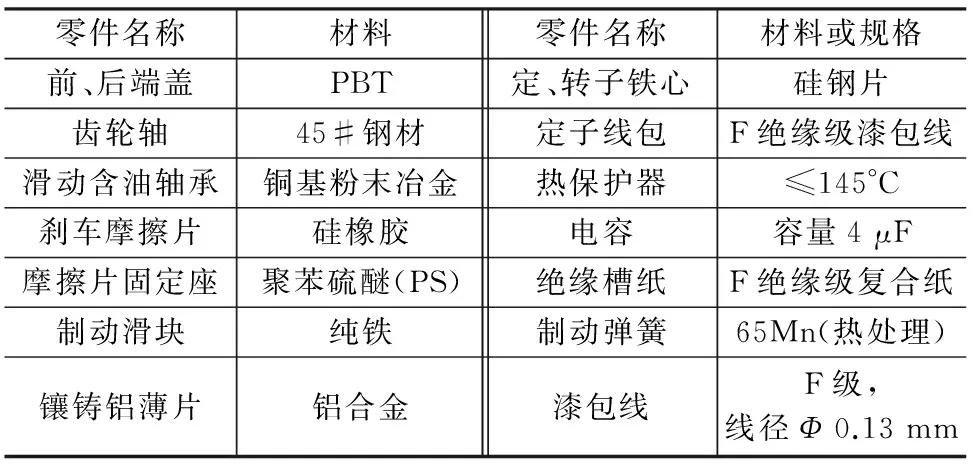
表3 旁磁制动单相电动机材料表

表4 双向行程定位记忆开关材料表
3 60型管状电机转速的分析计算
3.1 60型管状电机运动简图及其速度分析计算
60型管状电机减速器为2K-H(NW)行星齿轮传动型式[6],电机转子齿轮轴设定为主动太阳轮,行星架为输出从动装置,内齿圈固定,属于减速传动,其运动结构剖面简图如图10所示。
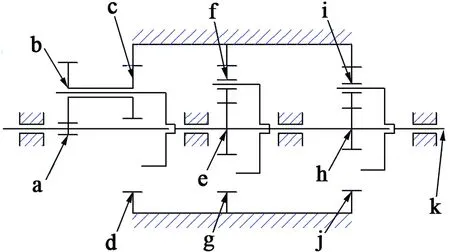
图10 60型管状电机传动运动简图
图10中,a—k为各齿轮符号,根据2K-H(NW)型行星齿轮传动的常用传动型式、特点和齿数选配方法,确定各齿轮的齿数如表5所示。
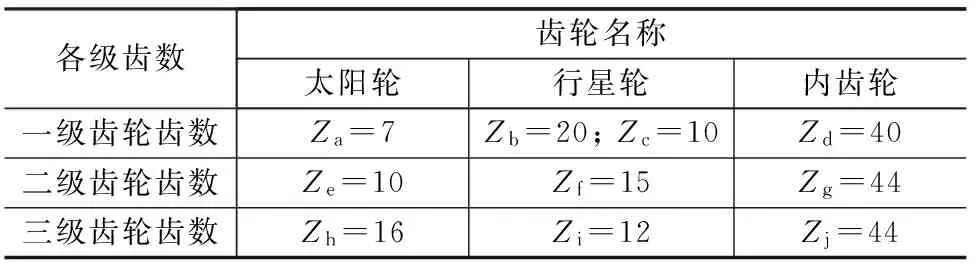
表5 60型管状电机2K-H(NW)型减速器各齿轮齿数
由计算及选用模数原则,一级减速内齿轮均采用同一小模数m=0.9 mm的变位齿轮,二级、三级内外齿轮均采用统一小模数m=1 mm的变位齿轮。一级传动的行星轮设计 成双联齿轮,它为2K-H(NW)型内外啮合方式,二级、三级为常见的2K-H(NGW)型[6],它们具有公用行星轮的啮合方式,因此管状电机输出速度为nout,其输出速度按如下式(1)计算,其中iak为减速器总传动比,iae为第一级传动比,ieh为第二级传动比,ihk为第三级传动比,n电机为旁磁制动单相异步电动机输出速度。管状电机输出速度nout计算过程如下:
(1)
因此,iak=iae×ieh×ihk=231.43。
若n电机=2 800 r/min,则管状电机输出轴转速nout=12.1 r/min。
3.2 35型和45型管状电机运动简图及其速度分析计算
由于35型和45型管状电机传动型式、安装方式和传动原理相同,均为2K-H(NGW)行星齿轮传动型式,它们只是齿轮齿数、模数和变为系数等不相同,因此,它们的也可分析其传动简图后,其三级减速器每一级的速比iac计算方法可按式(2)得出,其中za为太阳轮齿数,zc为内齿轮齿数,这里不再详细分析。
(2)
4 结 论
管状电机包含零件数量达90种之多,大部分采用塑料注塑成型和粉末冶金压制而成,零件尺寸小,要求尺寸精度高至IT7,而且管状电机的设计是短时工作制,运转温度最大至摄氏145°C,为了保证零件精度和变形量更小,保障运转平稳,降低运转噪声,我们在研制过程中,创造性地设计了行星齿轮减速器的行星架与行星轮轴向心滑槽结构,且十多次改变了设计方案,不断掌握了各种材料的使用特性和其制造工艺,不断的变换不同的制造方法,合理选取微注塑成型工艺[7],合理选用适合各种零件的材料,达到了降噪减震的预期效果,按GB标准管状电机运转噪声在半消声室按声功率工程级测试结果低至:40~42dB;并通过分析运动简图,找出各种行星齿轮减速器的速度的计算公式,指导设计、生产和应用。通过几年优化方案,管状电机产品取得3项实用新型专利,并获第十六届中国专利博览会发明专利金奖,产品性能稳定,噪声低,寿命长,受到客户青睐。
[1] 广东凯科机电有限公司.长型旁磁制动单相异步电动机:CN03223022.2[P].2004-02-11.
[2] 柏远康,许爱华.提高旁磁式制动电机的刹车性能[J].电机技术,2013(5):32-33.
[3] 徐灏.机械设计手册[M].北京:机械工业出版社,1995:32.
[4] 广东凯科机电有限公司.低噪声三级行星齿轮减速器:CN03222819.8[P].2004-01-07.
[5] 广东凯科机电有限公司.内置式旋转行程开关:CN03223021.4.[P].2004-04-07
[6] 张展,姚振甫.实用机械传动设计手册[M].上海:科学出版社,1994:565-566.
[7] 赵雅珠.微型行星齿轮减速机构制造工艺概述[J].机械设计与制造,2010(9):242-243.
Improvement Design and Revolving Speed Analysis of Tubular Motor
ZHOUJin-tian
(Guangdong Engineering Polytechnic,Guangzhou 510520,China)
Three different types of tubular motors' major performance parameters during the period of research and development were introduced. Major components of tubular motors include side-magnetism brake motors, planetary reducers and ovonic mechanical stroke positioning memory switches. Structural features of components above were explained. Different materials utilized for various components during research and development process were concluded. At the same time, kinematic diagram analysis method was exploited to confirm calculation methods for three kinds of tubular motors. Thus tubular motor manufacturers can be directed to adjust technical parameters, making users acquire more accurate motor output speed.
tubular motor; squirrel cage with cast brake magnet; reducer; kinematic diagram
2015-09-18
TM343
A
1004-7018(2016)06-0013-04
周锦添(1965-),高级工程师,主要研究方向为电机生产系列设备研发、电机制造工艺研究、机械设计、机电一体化技术。