基于多输入多输出被动式室内定位算法研究∗
2016-11-28张亚军王洪君
张亚军,王洪君
(1.昌吉学院计算机工程系,新疆昌吉831100;2.山东大学信息科学与工程学院,山东济南250100)
0 引言
定位是各种基于位置服务(location based services,LBS)的最主要的部分.在室外环境下使用全球定位系统(Global Positioning System,GPS)能够相当精确的完成定位,但是在室内环境,由于现代建筑材料和结构、GPS信号的衰减等原因,造成室内定位的精确度严重下降,从而引起研究人员对室内定位的研究热潮.前人已经在室内定位方面使用射频技术(Radio Frequency,RF)进行探索研究,如WLAN[1−3]、无线传感器(Wireless Sensors)[4]和Radio-frequency Identification(RFID)[5,6].此类技术大多有一个共同点——需要携带具有无线上网智能手机或者RFID标签,即主动式(或有源)定位.
在一些紧急情况下,主动式定位会受到限制,而被动式(或无源)定位(Device-Free Passive Localization,DfP)作为热门研究,受到研究者的青睐.被动式定位是被定位的目标在未携带任何电子设备的情况下准确定位其目标位置的一种技术.如在来访者不需要携带特殊硬件设备的情况下,进入大型展览馆、博物馆、大型购物中心、贵重物品仓库等,相关部门的管理人员希望能够预防盗窃和人员迷路.另外室内被动式定位技术亦可应用在医院和家庭住宅,在不侵犯个人隐私的情况下,帮助医护人员定位其目标人员的活动情况,在突发事件时可及时提供医疗帮助[7,8].同时,被动式定位也可为人质营救和边境监测方面提供帮助,警务人员可以利用被动式定位技术对室内人质周边的情况进行监测和分析,便于制定营救方案,而在边境重点地区可以部署传感器,组建传感网络,对人员活动进行监测[9,10].
文献[11]是基于RSSI设计分析并部署的Nuzzer系统.该系统使用概率统计技术,实现室内多径环境下针对单目标的定位和追踪功能,定位中值误差小于2 m,同时具有统计人数的功能.由于RSSI是介质访问控制(MAC)层多种信息的叠加效果,易受室内复杂环境的影响,RSSI值变化范围较大,导致定位精度和鲁棒性效果不好,而CSI是物理层(PHY)信息,具有较好的细粒度和鲁棒性[12,13],因此基于CSI技术的方案逐渐受到重视.文献[14]则提出基于CSI的被动式目标统计方案,讨论CSI和运动目标之间的关系,发现CSI特征和移动目标数量之间的一种单调函数,在不需要现场勘查的情况下实现群聚计算.文献[15]提出一种非入侵式的监测移动和静止目标的DeMan方案,利用CSI的相位和振幅信息监测移动目标,同时依据目标的呼吸情况监测静止目标.文献[16]分析物理层信道状态信息并解释RSSI技术的缺点,探索正交频分复用系统的子载波的频率多样性,提出FILA方案–利用信道状态信息(CSI)构造传播模型和指纹定位系统,实验对比相应的RSSI方案,FILA具有较高的定位精度.
本文是基于CSI的细粒度特性,利用无线MIMO系统和指纹定位法,实现被动式目标定位,并部署实验和验证其效果.
1 信道状态信息及被动式定位
1.1 被动式定位(DfP)
不像RFID、GPS等常见的主动式感知或定位系统,被定位的目标需要携带电子设备主动发送信号或者信息交换,从而获取覆盖范围内的目标感知和定位,如手机地图、儿童智能定位手表等.被动式(感知)定位是指在无线传感覆盖范围内,被感知或定位过程中,目标不需要携带任何电子设备或者不需要目标主动参与感知定位等活动,从而达到目标被动式感知或定位的一种新型技术.
在之前研究人员提出的被动式定位方案,基于射频层析成像的RTI方案[17]是研究的重点,但是此类方案的共同点–需要部署大量的传感器节点,不仅工作量大,而且收集RSSI时容易导致网络阻塞、耗费参数设置校准时间等,还需尽可能减少室内多径效应,因此付出的代价较大.目前较为流行的是采用普通的商用设备即可组建无线传感网络,节约硬件成本,附加成本较低.本文通过获取细粒度的CSI,利用室内多径效应,提高定位效果.
1.2 信道状态信息(CSI)
在此简要的讨论CSI基本原理.无线传感网络中,在发射机和接收机之间的通信链接的属性是可以由CSI描述的.CSI不但能够解释信号从发射机到接收机的工作原理,而且解释散射、衰落及功率的共同效应.在窄带衰退信道中,一个MIMO系统可以用下式表示:

其中Y=[y1,y2···yi,···yn]接收矩阵,是X=[x1,x2,···xi,···xn]发送矩阵,代表H信道矩阵,是N高斯白噪声矩阵.而信道矩阵H(即全部子载波的CSI)可以用公式(2)估计:

公式(2)说明在MIMO系统中CSI是具有p×q×m维的PHY的细粒度值,描述从发送端到接收端基带的信道增益.其中p和q分别是发送端和接收端的天线数目,m代表子载波的数量.由以上分析可知,信道矩阵H由公式(3)表示:

其中


图1 系统框架图
其中Hi和∠Hi分别是第i个子载波的振幅和相位值.对于MIMO系统来说,Hi是具有p×q维的,可以由公式(5)表示:
经过本次实验的前期验证对比工作,发现编号为16的子载波定位效果较为明显,因此采集的CSI都是编号为i=16的子载波,即Heff=H16,本文p和q的值分别取2和3.
2 指纹定位方法与原理
在本节介绍指纹定位法,重点是构建指纹库和定位阶段两个部分.同时将探索定位和位置估计的射频地图信息.
2.1 构建指纹库
图1是本方案的定位系统架构.在构建指纹库阶段,作为指纹方案的基础,我们需要收集CSI进行处理为生成一个电子地图位置信息构建指纹库信息.通常情况下,我们认为是在2维平面上进行定位.因此,一个2维参考点坐标lj=(lx,j,ly,j),整个采样参考点位置见图2所示.我们收集所有参考点的物理层信息CSI,同时利用滑动窗口技术,进行平滑处理,作为指纹库训练值存储起来.整个参考点的Radiomap将会在2.2节详细介绍.
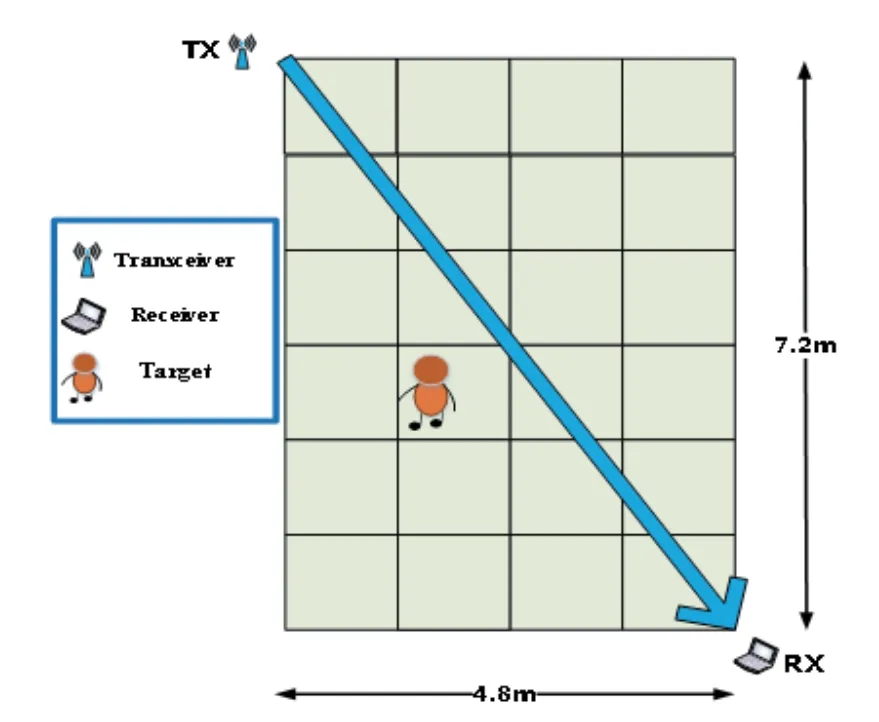
图2 实验部署及位置参考点
2.2 定位和位置估计
定位阶段主要任务是把当前单目标进入传感范围内,获取目标在当前位置时的CSI,进入位置指纹库对比,依据定位算法寻找最好的匹配.根据前人提出的概率模型可以解决室内环境下的定位问题.我们在此使用改进的最大似然值法(maximum likelihood,ML),认为在固定位置的AP观察到的Heff作为高斯变量.在实验过程中,构建向量IH=[Heff,1,...,Heff,K],位置估计问题等价于最大化后验概率li.通过贝叶斯定理,

我们改进的ML利用空间相关性来确定P(li).为了确保当前观察值Hobs和指纹库的训练值Htra相似性,采用皮尔逊相关系数来表示,如公式(7)

相关系数越高,则估计的位置越接近真实位置.先验概率P(li)使用公式(8)计算:

其中L是在Radio-Map中的真实位置数总和.
公式(9)计算似然值P(IHeff|li):

而本文中每个参考点的信号强度认为是高斯变量,则可计算P(IHeff,k|li)

其中Heff,k和σeff,k分别是对应Heff,k的期望和方差.
依据以上公式,可计算未知位置的估计值:

3 实验部署和实验结果讨论
本部分重点讨论实验部署及其对实验结果的分析.
3.1 实验部署
实验场景:在室内环境选择上,我们选择常见的休息大厅.整个实验区域呈矩形,面积约34.56 m2.在本次实验中,设置一对AP-DP,详细见图2,休息大厅被划分为数十个正方形区域,我们选择其中的24个位置作为参考点,每个小区域为边长为1.2m面积为1.44m2的方格.
数据收集和处理:实验使用TP-LINK TL-WR842N无线路由器作为无线AP(Access Point)通过射频链接向DP(Device Point)发送信息,而DP端是装备有商业802.11n 5300 NIC的电脑.一对AP-DP有两个发送天线和三个接收天线.本实验中,AP和DP安放在距离地面0.95m高的方凳上面,我们使用一对AP(2个)和DP(3个)全部的天线,从而达到提高定位精度的目标.同时,将对收集的数据使用滑动窗口技术进行预处理(窗口长度为20),降低定位误差.
3.2 实验结果
本实验区域内所采集的24个参考点坐标用*号表示,根据指纹定位法估计的位置用·表示,单向箭头由估计位置指向实际位置,见图3.注意:此段分析的估计位置是根据6条链接的情况下所得出的结果.依据图2和图3可以发现,在图2对角线附近的位置估计比较准确,分析其原因:主要在对角线附近由于目标是“穿过”直射链路,对CSI的影响较为明显.而在实验场景中,图2左侧是靠近展览板和墙壁,对信号具有较强的反射和散射作用(即多径效应),对比实际位置第一列的估计位置(自左向右),该6个估计位置和真实位置的误差较小,由此可见,本文的方法在多径环境下,亦能够实现高精度的定位.
均值误差计算我们采用欧氏距离:

图3 位置图

其中N是采样点数目,(x,y)表示采样点坐标,(xn,yn)代表对应的估计位置坐标.
根据我们改进的方法计算估计位置,讨论链接数和均值误差的影响.对比文献[18]中的所提出的Horus方案,本文的方法具有优势.尤其是体现在链接数目增加的情况下,我们方案优势明显,如图4所示:链接数目在1-3之间时对比Hours方案,本文方案均值误差降低约10%-15%之间,而在4-6条链路时,均值误差降低20%以上,最优均值误差值为1.18m.
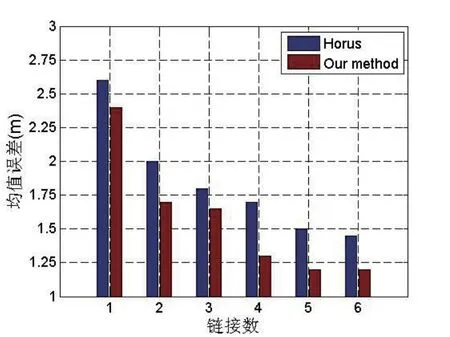
图4 链接数对均值误差影响

图5 定位距离误差的累计分布
根据定位误差分析,使用6条链路估计定位,绘制定位误差累计分布图(cumulative distribution function,CDF).在图5中,整体上可知本文方案CDF高于Horus方案:在距离误差为1.2m时,本文方案和Horus方案的CDF分别为0.66和0.41;而在距离误差在1.8m时,本文方案和Horus方案的CDF分别为0.9和0.8.
4 总结
虽然室内被动式定位逐渐成为研究热点,但是实际研究过程中遇到的室内情况较为复杂.本文提出一种基于无线MIMO系统的被动式室内定位方法,同时改进最大似然值法,进行位置估计.经过实际场景及其实验分析对比,本文的方法具有较低的定位误差,且在多径效应下,定位误差进一步的降低,提高室内定位的准确性.在后续研究过程中,将在实验平台上,开展室内被动式目标追踪技术研究.
