带有伸缩舵面的电动舵机复合控制器设计
2016-11-26朱军伟彭科容刘振永
朱军伟,彭科容,刘振永
(中国空空导弹研究院,洛阳 471009)
带有伸缩舵面的电动舵机复合控制器设计
朱军伟,彭科容,刘振永
(中国空空导弹研究院,洛阳 471009)
电动舵机采用伸缩舵可以大幅度减缩机载制导武器的横向尺寸,有助于提高载弹量并适用于内埋发射方式。提出了一种带有伸缩舵面的电动舵机复合控制器方案,设计了限流电路,限制了电机的最大电流,简化了控制信号数量,采用分段PID控制,设计了基于数字信号处理器电动舵机舵面偏转与伸缩复合控制器,并进行了实验,实现了位置给定的准确跟踪,结果表明该系统控制效果良好,方案可行。
电动舵机;伸缩舵面;数字信号处理器;分段PID
0 引 言
电动舵机因具有结构简单、输出转矩大等一系列优点,已广泛应用于多种机载制导武器。对于机载制导武器,其横向尺寸直接影响载机载弹量的大小及是否适用于内埋发射方式,从而影响作战能力[1-2]。国内外已开展了一系列减小机载制导武器横向尺寸的研究,包括舵面小型化、小弹径设计等,小直径弹体的设计会减小制导武器内部容积,设计难度大幅度增加,影响作战效能;舵面小型化虽然可以减少制导武器的横向尺寸,但在一定程度上损失了系统飞行的稳定性和机动能力。由于横向尺寸中舵面尺寸占有很大的比例,采用伸缩舵可以大幅度减缩制导武器的横向尺寸,是一种相对理想的解决途径,因此研究带有伸缩舵面的电动舵机复合控制系统具有重要的现实意义。
结合伸缩舵面的控制需求,以数字信号处理器TMS320F2812为核心,本文提出了一种带有伸缩舵面的复合控制器方案,同时对系统硬件、软件进行了设计,并进行了实验验证。
1 总体方案设计
以单通道为例,电动舵机伸缩与偏转复合控制系统方案框图如图1所示,舵面由固定部分和伸缩部分组成,偏转控制采用永磁直流电机驱动,伸缩控制采用无刷直流电机驱动,采用同一控制器进行控制。

图1 系统方案框图
控制器接收控制指令,根据偏角位置反馈信号,形成控制量输出,驱动执行机构往复运动,形成偏角位置的闭环控制系统;接收伸缩指令控制舵面伸开,伸展到位时舵面触发到位检测开关,停止控制量输出,舵面需要收回时,手动解除锁紧装置,控制舵面收回。
一般情况下舵面只需快速展开,伸展过程中舵面位置不需精确控制,且电机输出经过了减速装置,因此可通过无刷直流电机转子位置传感器估算舵面伸展过程的位置,修正后作为反馈信号,构成位置闭环控制,该方案无需设计专用的反馈装置,可大幅度降低设计难度。电机为4对极无刷直流电机,采用三相霍尔作为位置传感器,减速机构采用二级齿轮,减速比均为1.5,滚珠丝杠导程为3 mm,则霍尔传感器能够分辨的最小伸缩量:
(1)
式中:P为滚珠丝杠导程;i1,i2为齿轮减速比;p为无刷直流电动机极对数;m为霍尔传感器相数。
驱动机构以减速机构为核心,实现电机旋转运动到舵面直线运动、偏转运动的转换。伸缩控制驱动机构与舵面伸缩部分相连,偏转控制驱动机构与舵面固定部分相连,二者同轴安装,通过到位开关检测舵面是否伸缩到位,并采用锁紧装置固定舵面。偏转执行机构上安装舵偏角传感器,检测偏角信息,形成位置反馈,驱动机构示意图如图2所示。
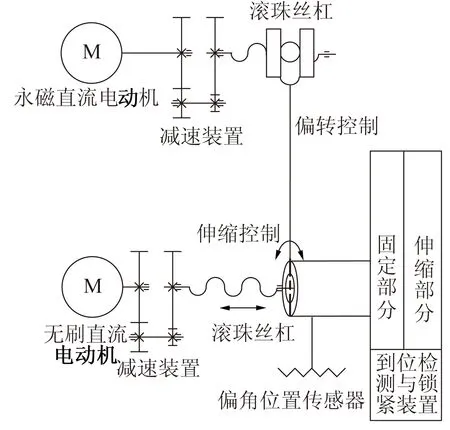
图2 驱动机构示意图
2 控制器设计与分析
2.1 控制器构成
控制器采用模块化设计思想,主要由控制电路、伸缩控制功率电路、偏转控制功率电路组成,各部分功能独立,接口简单,便于二次集成,实现小型化设计,控制器构成如图3所示。

图3 控制器构成图
2.2 控制电路设计
控制电路以数字信号处理器TMS320F2812为核心,采用TPS767D318提供3.3V和1.8V数字电源,利用串行通讯专用芯片MAX3490与上位机进行RS-422通讯,提高测试性;各通道偏角信息滤波通过运放LM148转换为-10V~+10V的电压信号,送至外置14位高精度A/D转换器TLC3578进行转换;永磁直流电机采用一路PWM控制,无刷直流电机采用一路PWM和一路方向信号DIR控制,简化接口数量,采用同一数字信号处理器可实现多个通道的控制。
2.3 功率电路设计
伸缩控制功率电路和偏转控制功率电路主电路采用IRFP260分别构成H桥电路和三相逆变电路,最大电流可达46A,满足系统需要;功率电路采用IR2103驱动。采样电阻采集电机直流母线电流,经信号处理后送至比较器LM119与参考电压进行比较,形成过流保护信号,过流保护信号参与逻辑运算,实现过流保护,电路原理如图4所示。

图4 过流保护电路图
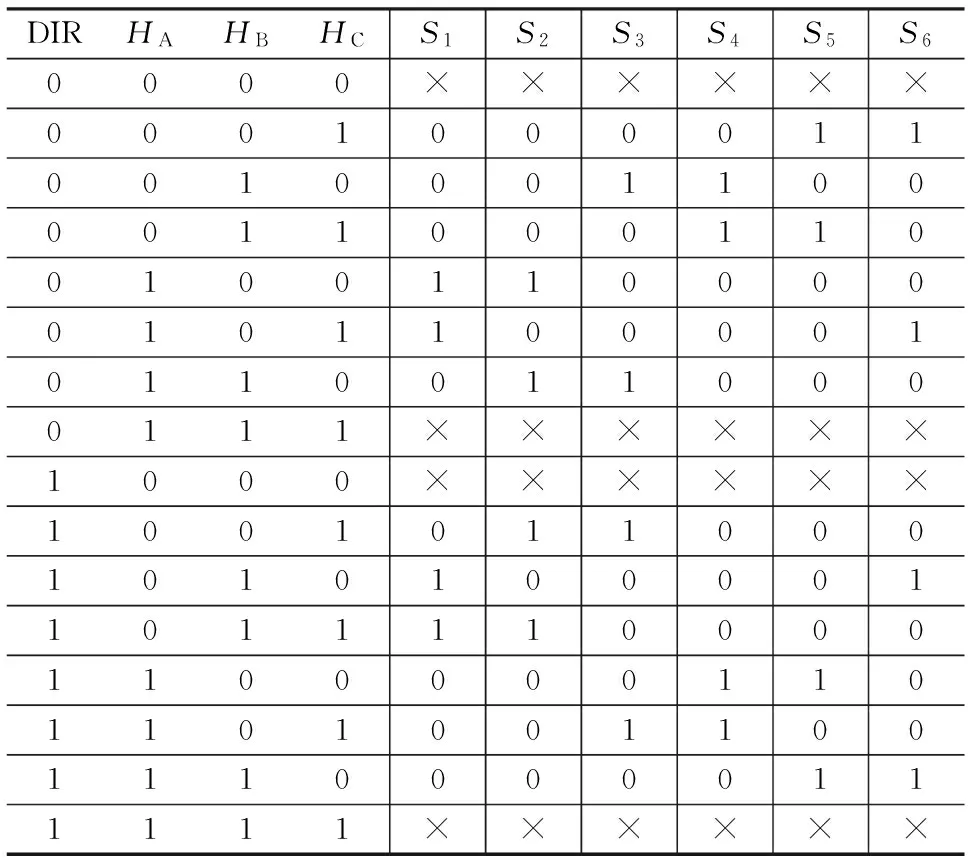
伸缩控制功率电路接收到PWM信号和DIR信号后通过光耦HCPL5231进行隔离,并与三相霍尔信号进行综合,无刷直流电机采用两相导通六状态换相逻辑。换相逻辑如表1所示,表中“1”表示逻辑高电平,“0”表示逻辑低电平,“×”表示状态不会出现。
根据无刷电动机换相逻辑真值表,以“OC”表示过流信号,可以得出以下逻辑关系:
(2)
(3)

(4)

(5)

(6)

(7)
按照上述逻辑可实现三相逆变电路上桥臂的H_PWM-L_ON控制,电路原理如图5所示。

图5 无刷直流电动机换相电路图
死区产生原理电路如图6所示。偏转控制功率电路接收到PWM控制信号后进行采用光耦HCPL5231隔离并反相处理,形成两路互补的PWM,考虑到信号传输、逻辑处理存在一定的延时,设计了由电阻、电容、二极管形成的充放电回路和逻辑电路构成的死区产生电路,死区时间约为1~2μs,可避免H桥电路直通。
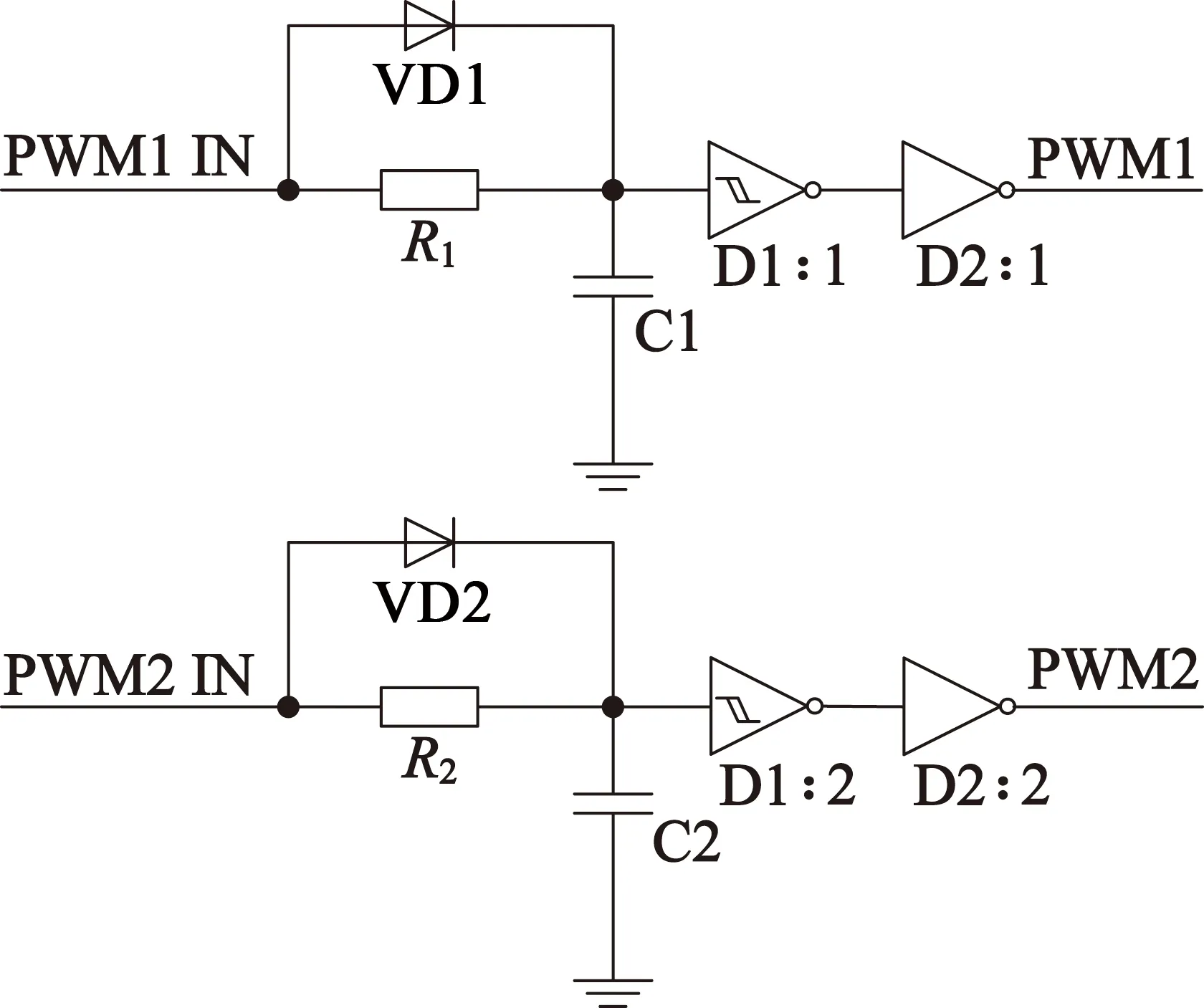
图6 死区产生电路原理图
在Saber软件中建立仿真模型,仿真结果如图7所示。

图7 死区产生电路仿真结果
3 软件设计
控制器采用数字控制,控制软件是控制系统的重要组成部分,将控制器各部分有机地联系起来,实现闭环控制。软件采用模块化设计,主要功能通过中断实现,流程图如图8所示。

图8 软件流程图
系统初始化完成系统配置,设定工作模式,进行系统控制和状态寄存器配置、PWM、A/D、SCI初始化,结束后进入循环等待。
中断是整个软件的核心,中断过程中完成通讯模块SCI、电路自检模块SELF_CHECK,反馈信号采集与处理模块POSITION_BACK、伸展控制及到位检测模块RATR_CONTROL等子程序的调用,根据控制指令调用控制算法PWM_CALCULATE形成控制量输出,实现偏角的准确跟踪。
控制算法采用分段PID控制,根据误差量Δθ绝对值大小而采用不同的控制规律:



E,F,G表示不同的常数,P1,P2表示控制算法,根据上述思路设计控制算法如下:



4 实验研究
试验采用的直流电机电感约为1.5mH,无刷直流电动机为无槽电机,电感约为0.35mH,给定系统伸展控制指令和舵偏角阶跃指令,测试电机起动时的电流波形,分别如图9、图10所示。从试验结果可以看出,直流电机起动时电流最大约为18.9A,无刷直流电机最大电流约为11A,最大电流得到有效限制,限流时控制器维持电流最大输出,可保证系统不间断控制,无槽电机电感小,限流频率高,电流波形较平。
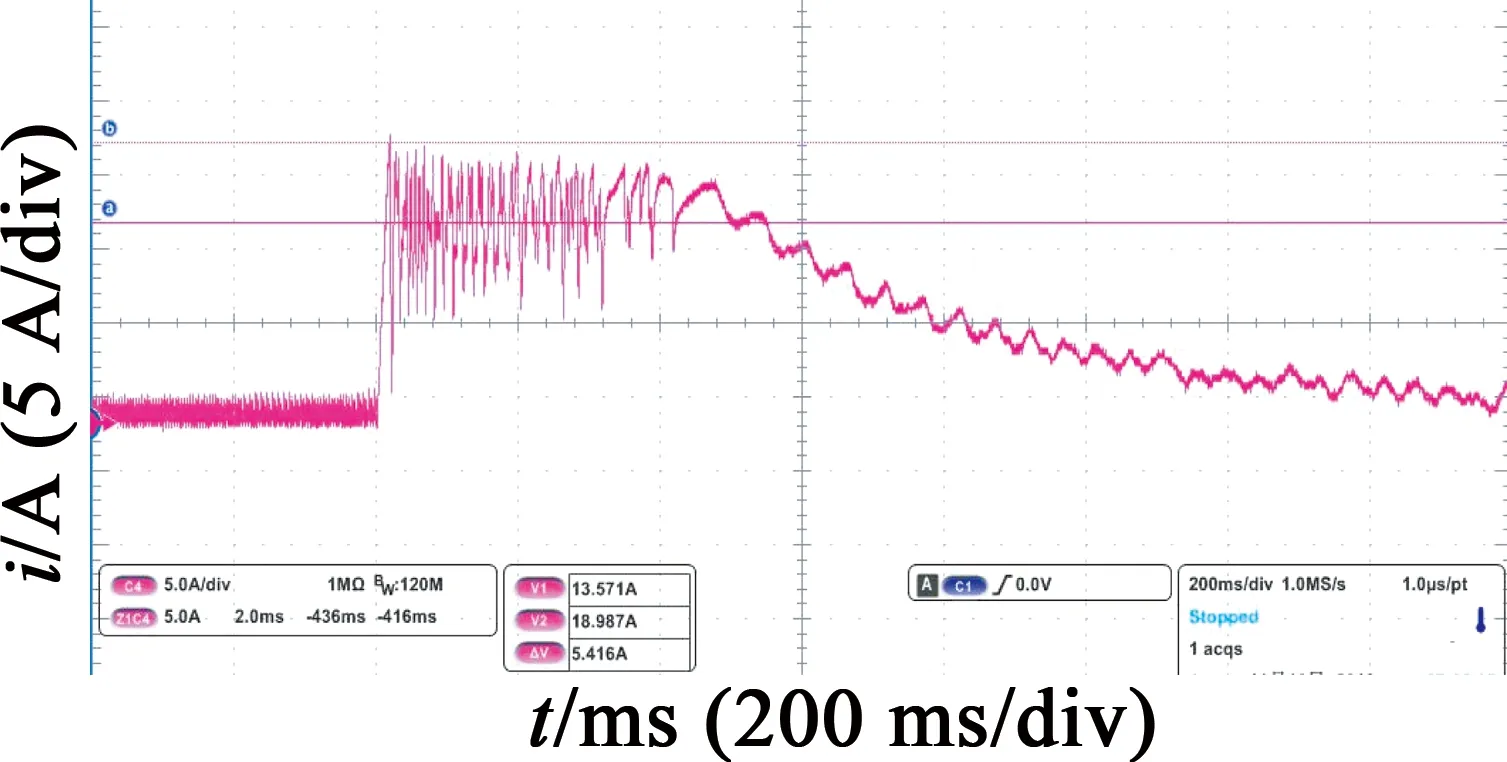
图9 无刷直流电机起动时电流波形(截图)

图10 直流电机起动时电流波形(截图)
通过上位机给控制器发送偏转控制指令,图11为给定10Hz典型正弦给定时位置响应曲线,系统实现了位置正弦给定的较好跟踪,相移约18.5°,动态特性好;图12为给定阶跃信号时的响应曲线,系统能够快速响应位置给定,超调约6.8%,超调小。

图11 正弦给定时位置响应曲线

图12 阶跃给定时位置响应曲线
5 结 语
本文提出了一种电动舵机舵面伸缩、偏转控制的复合控制器方案,采用死区产生电路设置死区,有效防止H桥电路直通,无刷直流电机采用一路PWM和一路方向信号DIR控制,直流电机采用一路PWM控制,简化了控制信号数量,使舵机各个通道的伸缩与偏转控制可采用一只数字信号处理器实现。实验结果表明,该系统动态特性好,响应快,对后续伸缩舵的研究具有一定的参考意义。
[1] 吴继飞,罗新福,徐来武,等.内埋武器分离特性及其改进方法研究[J].空气动力学学报,2014,32(6):814-818.
[2] 刘浩,张士卫.空空导弹新型内埋轴向弹射发射技术探析[J].四川兵工学报,2013,34(9):28-31.
[3] 庞佑兵,吕果,马朝骥.脉宽调制放大器死区技术研究[J].微电子学,2015,44(4):459-462.
[4] 赵志刚,林辉,张庆超,等.电动舵机伺服控制器的设计与研究[J].微特电机,2013,41(9):44-46.
[5] 任永春,孙建永,罗玉香.一种新型低功耗采样电阻短路保护电路设计[J].微电子学,2015,45(3):331-334.
[6] HEMATI N,LEU M C.A complete model characterization of brushless DC motors[J].IEEE Transactions on Industry Applications,1992,28(1):172-180.
[7] OVERMARS A H,TONCICH D J. Application of DSP technology to closed-position-loop servo drive systems[J].International Journal of Advanced Manufacturing Technology,1996,11(1):27-33.
The Hybrid Servo Controller Design of Electromechanical Actuator with Retractile Control Surfaces
ZHUJun-wei,PENGKe-rong,LIUZhen-yong
(China Airborne Missile Academy,Luoyang 471009,China)
The sectional dimension of a airborne guided weapons can be greatly reduced by using retractable rudders, it is also useful in improving the load of bombs and suitable for buried transmission mode. A hybrid servo controller used in electromechanical actuator was given forth in this paper. A current limit protection circuit was designed to limit the maximum current of the motors. The hybrid servo controller was carried out based on a digital signal processor by reducing the number of control signals which can track the given position exactly. The results of experiments show that this scheme is effective and practical.
electromechanical actuator; retractile control surfaces; DSP; segment-PID
2016-03-21
TM33
A
1004-7018(2016)08-0109-04
朱军伟(1983-),男,硕士,工程师,研究方向为永磁电机控制、机电一体化。