永磁同步电机无位置传感器矢量控制的实验研究
2016-11-26闫茂德石浩然
闫茂德,石浩然,林 海
(长安大学,西安 710064)
永磁同步电机无位置传感器矢量控制的实验研究
闫茂德,石浩然,林 海
(长安大学,西安 710064)
研究了一种永磁同步电机无位置传感器矢量控制方案。为了降低传统系统设计成本和复杂性,在矢量控制技术的基础上深入研究了空间矢量脉宽调制策略,并设计了一种由检测的直流母线电流重构出电机三相电流的方法。同时,在此基础上进一步设计了基于转子磁链的电机转速观测器,该观测器可以精确估计出电机的转速和转子位置信号。所提出的系统不仅能有效降低系统成本和复杂性,而且具有优良的稳态和动态特性。系统具有较好的起动特性并对于参考输入扰动和负载扰动具有较强的鲁棒性。实验结果进一步验证了提出方案的正确性和有效性。
电动汽车;永磁同步电机;矢量控制;无位置传感器控制
0 引 言
直流电机由于成本较低,不需要检测磁极位置,控制方法简单等原因多年来一直广泛应用于工业领域。但是由于直流电机带有整流电刷,也导致直流电机效率低,寿命短,维修困难等问题。而且直流电机也不适用于高速、大转矩运行。随着电机工业的快速发展,交流电机、永磁电机和开关磁阻电机等其他类型的电机广泛应用于电动汽车之中[1-2]。其中,由于永磁同步电机具有体积较小、功率因数高、效率较高和维护简单等优点更受到人们的重视。
虽然永磁同步电机在工业应用中具有很大的优势,但是也存在不足之处:控制系统较复杂、需要较多的传感器、永磁体有退磁问题,成本较高等。国内外学者和专家也为此提出了很多解决方法。文献[3]提出了无位置传感器控制技术,在系统中去除了电机位置传感器,在保持原系统性能的同时进一步降低了系统的复杂度和成本。文献[4]针对交流驱动提出了系统中电流检测技术的改进方案。文献[5-9]开展了一系列关于交流驱动系统中电流检测改进方案。主要思路是只使用一个直流母线电流传感器替代了传统系统中的三个电流传感器,利用单电流信号重新构造电机的三相电流。文献[10]针对无刷直流电机提出了一种基于单电流传感器技术的驱动技术,进一步降低了无刷直流电机驱动系统的成本。文献[11]提出了采用直接转矩控制技术的感应电机驱动技术电流检测改进方案,也仅使用一个电流传感器实现了电机三相电流的重构。
为了进一步减小系统成本和复杂度,本文针对微电动车用永磁同步电机研究了单电流检测技术和无位置传感器控制技术。整个系统仅采用一个直流母线电流传感器,通过该传感器和矢量控制技术可以实现三相电流的重构,在此基础上,利用重构的电机三相电流设了一种基于转子磁链的转速观测器。该观测器可以准确估计电机的转子位置和转速。提出的系统方案在保持传统方案的优异工作性能的同时可以有效减少系统的传感器数量,极大地降低了系统成本和简化了系统的结构。最后,通过硬件实验验证了提出方案的正确性和有效性。
1 永磁同步电机无位置传感器矢量控制方法
本文研究的无位置电动车用永磁同步电机(以下简称PMSM)矢量控制系统结构如图1所示。系统主要组成部分为:转速PI调节器,d轴电流PI调节器,q轴电流PI调节器,Clarke坐标变换模块、Park坐标变换模块、Park坐标反变换模块、脉宽调制模块、转速观测器、三相电流重构模块、逆变器和PMSM。

图1 PMSM无位置传感器矢量控制系统结构图
系统主要采用基于转速和电流的双闭环矢量控制方法。其工作原理为:三相电流重构模块利用测流电阻检测得到通过该电阻的电流并通过解析得到三相定子电流;利用Clarke坐标变换模块和Park坐标变换模块将三相静止坐标系下的电流转换成两相旋转坐标系下的电流。它们与两相旋转坐标系下的参考电流相减分别输入到两个电流调节器得到两相旋转坐标系下的电压。再经过Park坐标反变换得到两相静止坐标系下的电压。它们输入到脉宽调制模块进一步为逆变器提供PWM开关信号。其中,转速观测器利用两相静止坐标系下的电压和电流可以估计出电机转速和转子位置信号。可以看出,提出的系统仅使用了一个电压传感器,与传统的系统需要2个电流传感器和1个位置传感器相比较,新系统可以在保证不影响系统性能的前提下能有效减小系统复杂度和成本。
在系统中,脉宽调制模块、三相电流重构模块和转速观测模块是最为重要的部分,详细的工作原理如下。
1.1 脉宽调制策略
在提出的系统中,脉宽调制模块主要采用了空间矢量脉宽调制技术(SVM)[6-8]。该项技术的主要内容:在一个采样周期内选择出相邻的两个非零矢量和零矢量,然后可以计算出每个矢量作用的时间,从而可以合成任意一种我们所需的电压矢量。对于常见的六开关三相电压源型逆变器而言,通过对开关组合的变更可以产生八个基本空间电压矢量。其中有6个非零矢量为V1(100),V2(110),V3(010),V4(011),V5(001)和V6(101)。两个零矢量为V0(000)和V7(111)。如图2所示,这6个非零电压矢量幅值相等并将矢量平面分成了6个60°扇区(I, II, III, IV, V,和VI),两个零矢量位于矢量平面中心。

图2 空间电压矢量调制原理
在图2中,Ts为系统采样周期,T1和T2分别为第一个基本矢量(V1)和第二个基本矢量(V2)的持续作用时间,且Ts=T1+T2+T0,其中T0零矢量(V0或V7)的作用时间。θ为参考矢量(Vs)与第一个基本矢量的夹角。在扇区Ⅰ内的参考矢量(Vs)的合成可采用下式:
根据式(1),可得:
(2)
其中,|Vs|,|V1|和|V2|分别为参考矢量和两个基本矢量的幅值。为了将逆变器的开关频率降为最小,本文采用七段式对称SVM技术,即在开关波形的中间以及首尾处分别插入零矢量。如此便可通过在不同的扇形区域中选择不同的基本矢量来合成任意一个空间矢量,与此同时又可以保证逆变器的开关频率最小且保持恒定。
1.2 三相电流重构技术
在三相电流重构模块中,利用空间矢量调制技术的特点由采样电阻电压解析出电机三相电流。系统主要采用单电流采样电阻的逆变器结构。该结构中,采样电阻的一端分别连接到逆变器三个桥臂下管发射极,另外一端连接到电源负极。详细结构如图3所示。其中,Rdc为电流采样电阻,通过该电阻的电流为Idc。

图3 带有单电流采样电阻的逆变器
如图3所示,逆变器主要由一个采样电阻Rdc、6个功率开关(S1~S6)和并联的反向二极管(VD1~VD6)构成。其中逆变器3个开关桥臂的一个公共点连接到直流电源正极,另外一个公共点通过一个电流采样电阻Rdc连接到直流电源负极。该逆变器向一个三相Y型绕组连接的PMSM供电,其中n为三相绕组公共连接点。如图4所示,先以扇区I为例进行分析,在一个采样周期Ts内,采用七段式对称SVM技术,在开关波形的中间以及首尾插入零电压矢量。生成的PWM波形可以分为七段(R1,R2,R3,R4,R5,R6和R7)。其中,R1和R7对应零矢量V0,R4对应零矢量V7,R2和R6对应非零矢量V1,R3和R5对应非零矢量V2。

图4 逆变器开关状态与母线电流关系(扇区I)
在一个采样周期Ts内的任意时刻,电机三相绕组电压为:
(3)
式中:Van,Vbn,Vcn分别为电机三相相电压;ia,ib,ic分别为电机三相相电流;ean,ebn,ecn分别为电机三相相反电动势;Rs为电机单相绕组等效电阻;Ls为电机单相绕组等效电感。
该逆变器的主要工作原理:以R1为例,此时的开关状态为000,逆变器上桥臂的三个功率开关管S1、S3、S5关断,下桥臂的3个功率开关管S2、S4、S6导通。此时,采样电阻Rdc无电流流过,即Idc=0,电机三相相电流也都为零;以R4为例,当开关状态为111时,逆变器上桥臂的3个功率开关管S1、S3、S5导通,下桥臂的3个功率开关管S2、S4、S6关断。此时,母线电流不经过次采样电阻,即Idc=0,电机三相相电流也都为零。
以R2为例,当开关状态为100时,逆变器上桥臂的功率开关管S1导通,下桥臂的2个功率开关管S4和S6导通,逆变器其它功率开关都断开。此时,母线电流由电机的A相绕组流进,经过电机的B相绕组和C相绕组,经采样电阻Rdc流出。采样电阻Rdc上流过的电流与流过A相绕组的相电流相同,即Idc=Ia。此时,由于电机电感较小,可以忽略电感压降,电机三相相电压瞬态值为:
(4)
由于本文使用的PMSM采用星形接法三相绕组结构,根据三相电流之和为零的原则和上面的分析结果,可以知道:其余两相定子绕组相电流瞬态值为ib=ic=-0.5Ia。
以R3为例,当开关状态为110时,逆变器上桥臂的两个功率开关管S1和S3导通,下桥臂的功率开关管S6导通,逆变器其它功率开关都断开。此时,母线电流由电机的A相绕组和B相绕组流入,经过电机C相绕组和采样电阻Rdc流出。采样电阻Rdc上流过的电流与流过C相绕组的相电流大小相同,但方向相反,即Idc=-Ic。此时,由于电机电感较小,可以忽略电感压降,电机三相相电压瞬态值:
(5)
同样可以知道,其余两相定子绕组相电流瞬态值为ia=ib=-0.5Ic。同理,如以上分析,可以类似推理出R5、R6、R7三段时利用采样电阻电流计算出电机三相电流的瞬态值。
如图2和图4所示,逆变器在扇区I内,一个PWM周期内采用电阻电流的大小是有规律的:在每个PWM周期内都有两个非零电压矢量,那么在每个PWM周期内,都会出现电机三相绕组中的两相绕组的电流与母线电流相同或相反,利用电机三相绕组电流关系,可以确定第三相绕组的电流。为了采样的准确性,需要在开关状态的中间时刻进行采样。表1列出了电压空间平面中的6个扇区在不同的七段式对称SVM波形下的母线电流与电机三相绕组电流的关系。

表1 不同扇区内的母线电流分布
1.3 无位置传感器速度估计方法
本文主要采用基于定子磁链的电机转速估计方法。如图5所示,在定子两相静止坐标系下可以分析电机定子和转子磁链关系。其中,θs和θr分别为定、转子磁链矢量的空间角位置。转子磁链矢量可以通过转子磁链矢量和定子电流矢量合成得到。

图5 电机定子和转子磁链矢量关系
定子磁链可以通过电机绕组相电压和电流估计得到:
(6)
转子磁链可以由定子磁链和定子电流计算得到:
(7)
通过转子磁链可以计算出电机转子角度:
(8)
根据转子位置可以得到电机转子速度:
(9)
因此,利用式(6)~式(9)可以精确估计出电机的转子位置和转速。
2 实验结果分析
为了验证我们上面提出的理论是否可行,可以通过实验来进行测试。以一台额定转速为3 000 r/min的永磁电机作为研究对象,利用TI公司的TMS320F2812作为主控DSP芯片和6个MOSFET开关功率管组成的逆变器进行实验。由图1控制策略可以设计出图6所示的系统硬件实现方案,其包含5部分:控制器、逆变器、PMSM、上位机和示波器。

图6 系统实验方案
在系统中,使用的PMSM参数:电机额定转速为3 000 r/min,定子绕组等效电阻为1.2 Ω,定子绕组等效电感为8.5 mH,极对数为4。系统设定直流母线电压为310 V,逆变器的开关频率为18 kHz,电机的设定运行转速为2 000 r/min。图7和图8为提出的系统分别在扇区I和扇区II内的PWM波形和采样电阻Rdc的电流实验波形。图9为稳态时的转速、转子位置、重构后的两相静止坐标系下的定子电流响应实验波形。

图7 扇区I时系统PWM波形和采样电阻电流响应

图8 扇区II时系统PWM波形和采样电阻电流响应
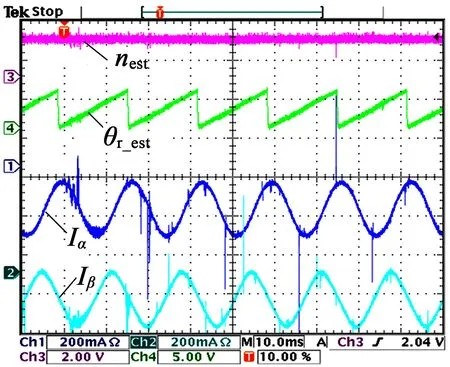
图9 系统稳态时的估计转速、估计的转子位置、重构后的两相静止坐标系下的定子电流响应
由图7、图8和图9可以知道,在电压矢量平面内,分别在扇区I和扇区II内的开关波形和采样电阻的电流波形符合理论分析。所生成的7段对称式SVM开关波形在不同的电压矢量作用下,其采样电阻的电流按照作用矢量的特性发生有规律的变化。提出的系统可以根据采样电阻有效重构电机三相电流,同时设计的转速观测器也可以准确估计电机的转速和转子位置。
为了进一步验证提出系统的动态性能,在系统实验测试中,主要研究三种条件下的系统响应性能。
(1) 系统起动性能。电机参考转速在0.01 s时系统由开环起动。在0.012 s时系统由开环切换为闭环运行状态。系统响应曲线如图10所示。

(a) 转速

(b) d轴参考电压

(c) q轴参考电压
由图10可以知道,电机转速在0.03 s内由静止状态达到设定转速。在进入稳速运行前,转速出现10 r/min的超调,系统具有快速的起动特性。在进入稳速运动阶段后,系统具有优异的速度响应特性。
(2) 转速突变系统性能。电机参考转速在0.04 s时由2 100 r/min突变至3 200 r/min; 在0.11 s时由3 200 r/min突变至2 100 r/min。系统响应曲线如图11所示。

(a) 转速

(b) d轴参考电压
(c) q轴参考电压
由图11可以知道,电机稳定运行在2 100 r/min。系统在0.04 s时,参考转速突变为3 000 r/min,电机实际转速在0.02 s内达到设定值。系统在0.11 s时,参考转速由3 000 r/min突变为2 100 r/min,电机实际转速在0.02 s内快速恢复到参考值。系统对于参考转速扰动具有较优异的动态响应特性。
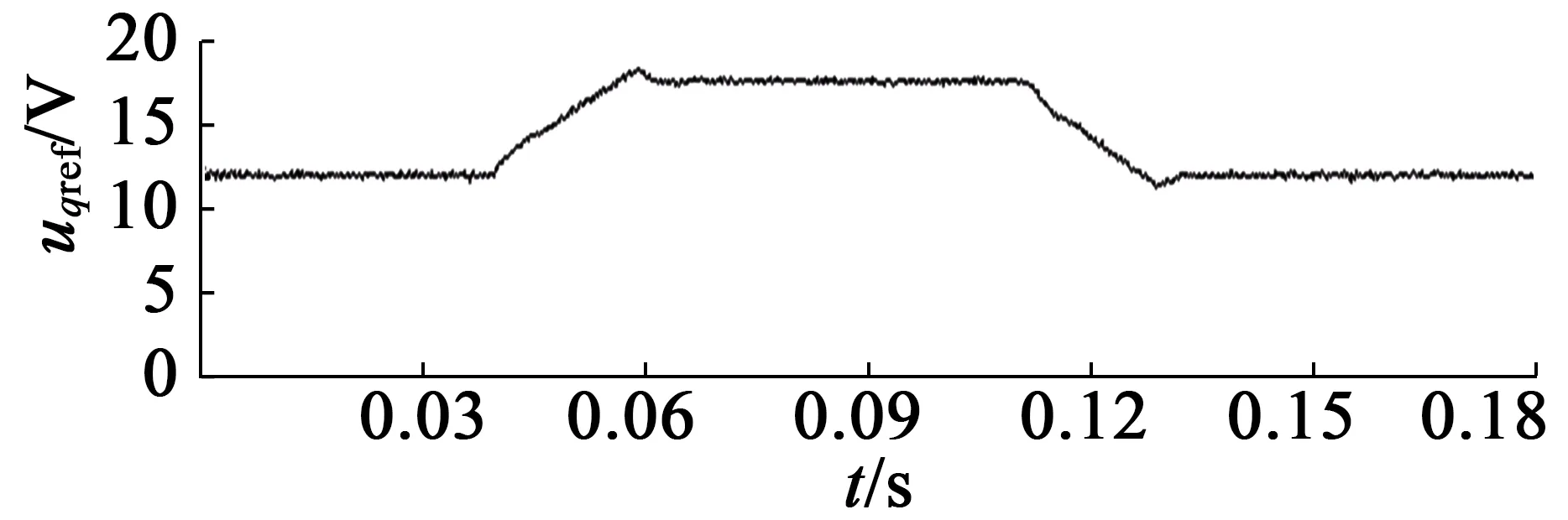
(3) 负载突变系统性能。电机负载转矩在0.065 s时由空载突变至1 N·m; 在0.135 s时由1 N·m突变至空载。系统响应曲线如图12所示。

(a) 转速

(b) d轴参考电压

(c) q轴参考电压
由图12可以知道,电机在空载状态下稳定运行在2 000 r/min。系统在0.065 s时,负载转矩突变为1.0 N·m,电机实际转速在0.01 s内出现较小的波动后迅速恢复到设定值。系统在0.135 s时,参考转矩由1.0 N·m突变为空载状态,电机实际转速在0.01 s内快速恢复到参考值。系统对于负载扰动具有较优异的动态响应特性。
综上,所进行的实验结果和理论分析一致,利用单电阻电流可以有效重构出三相电流,设计的转速观测器可以准确估计出电机的转速和转子位置。系统具有较优异的稳态和动态性能,尤其是对于输入参考转速扰动和负载扰动具有较强的鲁棒性。
3 结 语
(1)本文研究了一种PMSM无位置传感器控制方案。所设计的控制方案具有优异的工作性能,所设计的控制方案具有较大的理论研究意义和市场经济价值。
(2)在传统的矢量控制技术的基础上深入研究了空间矢量脉宽调制技术。利用该技术的工作特性,进一步设计了一种单电阻测量直流母线电流并能有效重构出电机三相电流的方法;通过一系列的实验测试,所提出的三相电流重构技术是正确和有效的,系统对于参考转速扰动和负载绕组具有较强的鲁棒性。
(3)设计了一种基于电机转子磁链的无位置传感器转速观测方法。设计的速度观测器可以精确估计电机的转速和转子位置信号。
[1] 陈清泉.电动车的现状和趋势[J].科技与经济,2003,16(1):56-59.
[2] 侯赛因.纯电动及混合动力汽车设计基础[M].2版.北京:机械工业出版社,2012.
[3] 汪贵平,马建,闫茂德.永磁直流电动机驱动汽车的数学模型[J].中国公路学报,2011,24(1):122-126.
[4]COLLIVD,STEFANORD,MARIGNETTIF.Asystem-on-chipsensorlesscontrolforapermanent-magnetsynchronousmotor[J].IEEETrans.Ind.Electron., 2010,57(11):3822-3829.
[5]SONGSH,CHOIJW,SULSK.CurrentmeasurementsindigitallycontrolledACdrives[J].IEEEInd.Appl.Mag., 2000,6(4):51-62.
[6]JOOHG,YOUNMJ,SHINHB.EstimationofphasecurrentsfromaDC-linkcurrentsensorusingspacevectorPWMmethod[J].ElectricMachinesandPowerSystems,2000,28(9):1053-1069.
[7]HONGRAEK,THOMASMJ.CurrentcontrolforacmotordrivesusingasingleDC-linkcurrentsensorandmeasurementvoltagevectors[J].IEEEInd.Appl.,2006,42(6):1539-1547.
[8]SUNK,WEIQ,HUANGL,etal.Anover-modulationmethodforPWM-inverter-fedIPMSMdrivewithsinglecurrentsensor[J].IEEETrans.Ind.Electron.,2010,57(10):3395-3404.
[9]HAJI.Currentpredictioninvector-controlledPWMinvertersusingsingleDC-linkcurrentsensor[J].IEEETrans.Ind.Electron.,2010,57(2):716-726.
[10]SARITHAB,JANAKIRAMANPA.Sinusoidalthree-phasecurrentreconstructionandcontrolusingaDC-linkcurrentsensorandacurve-fittingobserver[J].IEEETrans.Ind.Electron.,2007,54(5):2657-2664.
[11]HAFEZB,ABDEL-KHALIKAS,MASSOUDAM,etal.Single-sensor-basedthree-phasepermanent-magnetsynchronousmotordrivesystemwithluenbergerobserversformotorlinecurrentreconstruction[J].IEEETransactionsonIndustryApplications,2014,50(4):2602-2613.
[12]BERTOLUZZOM,BUJAG,MENISR.Directtorquecontrolofaninductionmotorusingasinglecurrentsensor[J].IEEETrans.Ind.Electron.,2006,53(3):778-784.
Experimental Study on Sensorless Vector Control for Permanent Magnet Synchronous Motor
YANMao-de,SHIHao-ran,LINHai
(Chang'an University,Xi'an 710064,China)
To reduce the cost and complexity of the traditional drive, a sensorless control scheme for the permanent magnet synchronous motor (PMSM) was proposed. By the technique of space vector pulse width modulation (SVPWM) used in the vector control, a method to reconstruct three phase stator currents from a DC-link current was investigated to reduce the number of current sensors of the traditional drives. Meanwhile, a flux based observer was designed to estimate the speed and rotor position of PMSM accurately. The system with the proposed scheme has a good steady and dynamic performance compared with the normal one, especially a good start-up performance and better robustness for the external disturbance of the reference input speed and the load. The experimental results verify the correctness and validity of the proposed algorithm.
electric car; permanent magnet synchronous motor; vector control; position sensorless control
2016-03-08
陕西省国际科技合作与交流计划项目(2015KW-023);教育部留学回国人员科研启动基金项目(教外司留 [2014] 1685号);2015年长安大学研究生高水平课程建设项目;长安大学2015年度教学改革研究项目(1525)
TM341;TM351
A
1004-7018(2016)08-0099-06
闫茂德(1974-),男,博士,教授,主要研究领域为非线性系统控制、电力电子与交流传动等。