基于事实搜索方法的三相感应电机节能控制研究
2016-11-26孟昕元
孟昕元,范 峥
(河南工学院,新乡 453002)
基于事实搜索方法的三相感应电机节能控制研究
孟昕元,范 峥
(河南工学院,新乡 453002)
提出了一种基于事实搜索方法的新型控制策略。在工作点处(一定的转矩和转速条件下),利用该策略可以寻找到唯一的定子电压值使得电机工作于最优效率。通过仿真结果分析,论证了该控制策略的合理性。在轻载及低频工作条件下,为了减小转差率,还介绍了一种滑差补偿器的应用。
三相感应电机;节能控制;事实搜索方法;滑差补偿
0 引 言
感应电机具有结实耐用、成本低廉以及维修方便等优点,在工业领域中应用广泛。据统计,电动设备消耗了全部电能的一半以上,在电气驱动中提高效率非常必要[1-2]。
工作于额定转速和额定转矩的感应电机具有非常高的工作效率,但是在轻载情况下,由于感应电机内部铜损与铁损不平衡性的存在,使得效率会发生大幅下降。因此,合理选择电机磁通大小可以实现节能目标[2]。感应电机的主要损耗通常包括:定子铜损、转子铜损、铁心损耗、机械损耗以及杂散损耗等。为提高电机工作效率,磁通量必须减小以实现铜损和铁损之间的平衡。常见的最小损耗控制策略多数是基于感应电机驱动的标量控制和矢量控制方法。
感应电机驱动控制可以基于多个性能参数,如:输入功率、转速、转矩、气隙磁通、功率因数、定子电流、定子电压以及整体效率[3]。感应电机驱动的效率优化通常涉及三种控制方案:简单静态控制、模型控制和搜索控制。搜索控制方案相对于其它两个有着更强的优势。相对于温度变化和饱和特性所带来的参数变化对另外两个控制方案影响极大的问题,该方案对于参数变化不敏感,因此具有更好的适应性[4]。
1 驱动系统的建模与仿真
感应电机原始驱动系统由三部分构成:基于IGBT逆变器的AC/AC变换器、三相笼型感应电动机、V/f控制器。为分析系统性能,首先应建立电机的数学模型。
基于磁链和电压方程,笼型三相感应电机在同步旋转d-q坐标系下的机电模型见文献[5-6]。仿真感应电机模型的参数如表1所示。
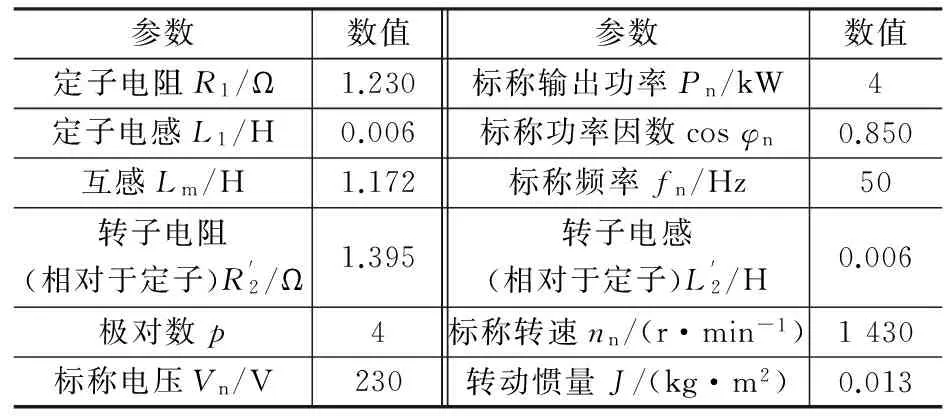
表1 平板式直线电机参数
2 效率优化控制器的设计
目前常用的优化方案主要有以下两种:损耗模型优化控制和功率在线搜索寻优控制[7]。其中损耗模型控制对电机参数依赖性较高,而电机参数在运行过程中不断变化,建立精确的模型非常困难,所以优化效果会受到影响;而功率在线搜索寻优则不受电机参数的影响,且可做到全局的优化,所以具有较高的实用价值[8]。
在稳态工作点处,驱动系统的效率可以用下式计算:
(1)
式中:Pm为输出机械功率,Pm=Lω,Ps为定子的输入总功率,Ps=1.5(vsdisd+vsqisq)。
基于搜索方法设计效率优化控制器,首先建立一个矩阵表格,如表2所示。该表格由负载转矩、频率值及定子电压值(即优化电压)构成,它是使用研究对象的实测数据建立的。

表2 最优定子电压(负载转矩与频率的函数)
根据表2中的数据,可得负载转矩、频率与优化电压、系统效率之间的关系如图1所示。
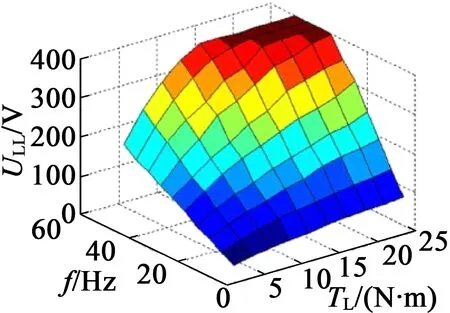
(a) 优化电压与负载转矩、频率关系图
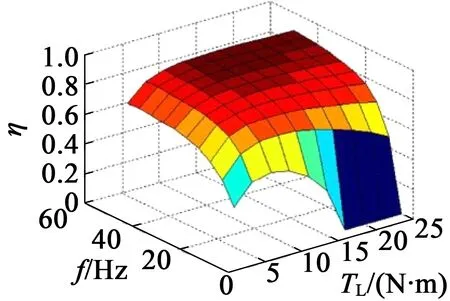
(b) 原始系统效率与负载转矩、频率关系图

(c) 最大效率与负载转矩、频率关系图
表2中的矩阵数据用来建立一个2维的搜索模型,它是效率优化控制器的主要部分。其搜索算法采用模糊搜索控制算法(FLSC)[9],如图2所示。

图2 模糊搜索控制单元
图2中,Pb和ψb分别是输入和输出的比例因子,通过大量实验总结出ψb为 0.16,而Pb在电机运行于稳定状态时与转速存在一定关系,所以选择转速作为计算模糊比例因子的参数,计算公式如下:
(2)
式中:ωr是电机的转子角速度;a,b是通过实验调试出来的参数,在本文中它们的值分别为 0.2,-40。

根据上述分析和在仿真中的不断调试得到表3的控制规则:


ΔP*d(k)Δψ*d(k-1)NPPBPMNMPMPSNSPSPSNSZOZOZONSNSPSNMNMPMNBNBPB
模糊控制的隶属度函数如图3所示。
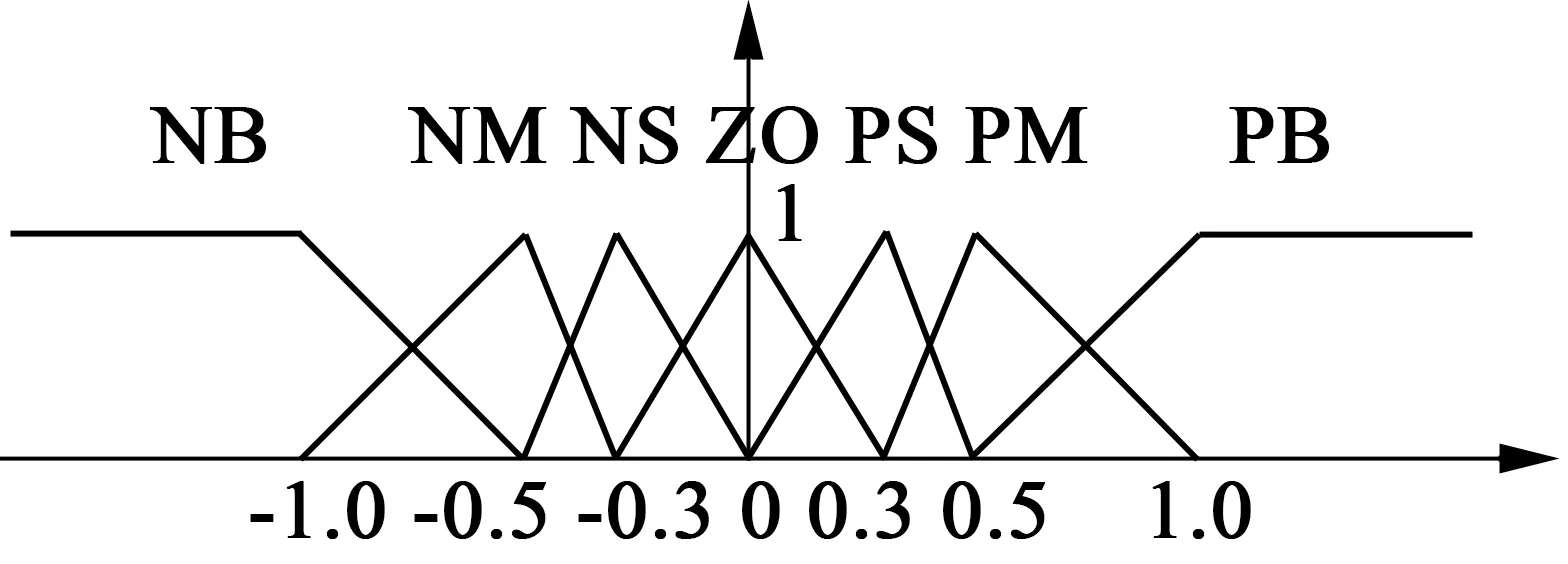
的隶属度函数
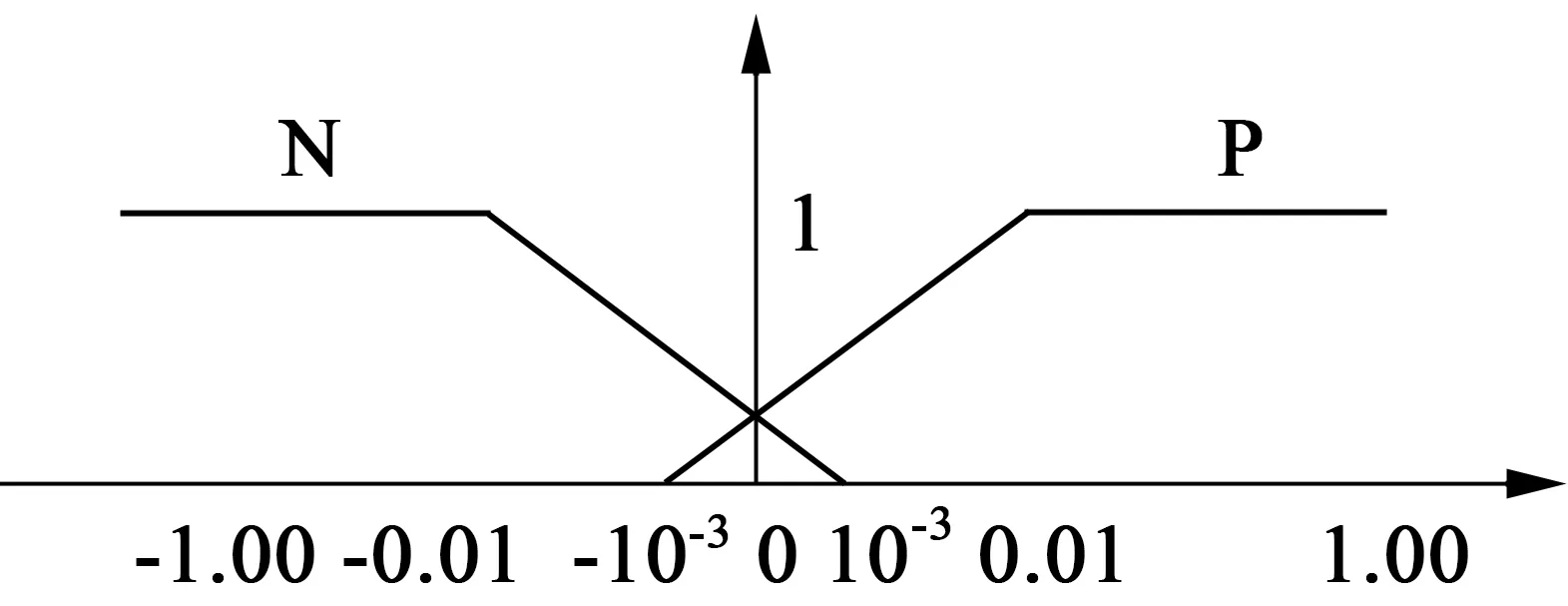
的隶属度函数
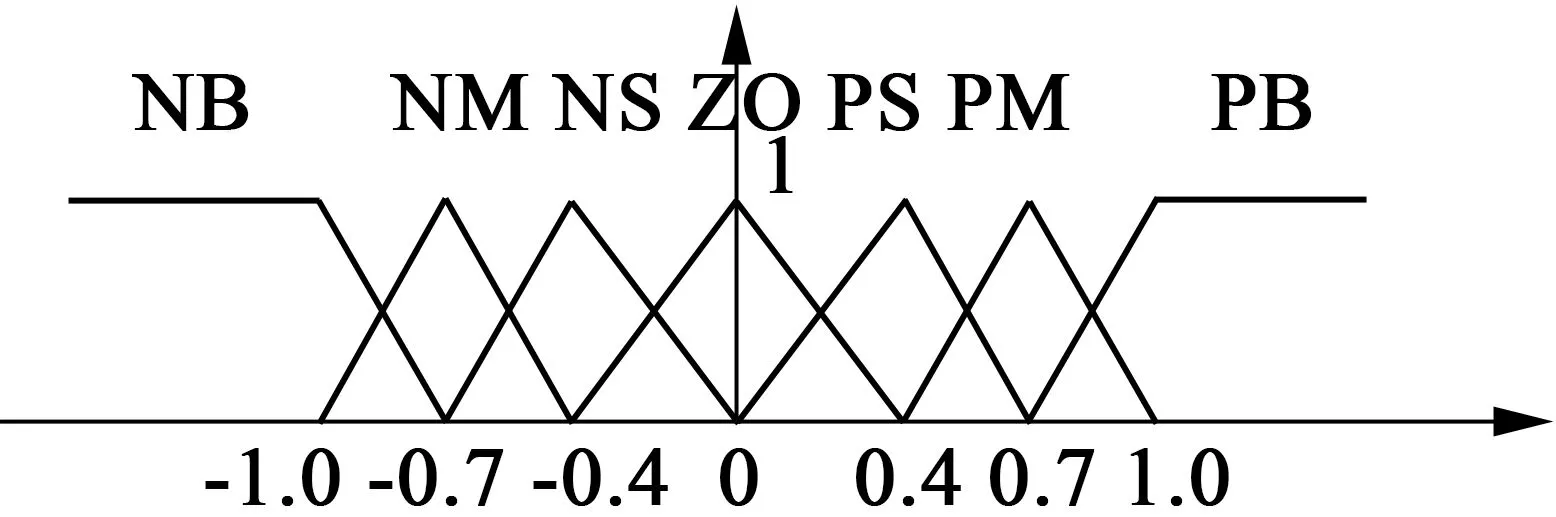
的隶属度函数
该方法能够实时在线得到电机各种稳态工况下的比例因子数值,具有自适应功能;算法对模糊集合的不对称隶属度函数设计,能够较好地解决系统在效率最优点处的振荡问题。
仿真结果显示,所提出的效能优化技术的主要缺陷在于转差率的增加,特别是在轻载和低频时,如图4所示。所以,应按照某个参考值sref对转差率进行补偿,这可以通过增加优化系统定子电压的方式增加电机电磁转矩来实现。在这种情况下,通过静差率误差的积分来获得补偿电压值,然后叠加到优化系统的电压之上。
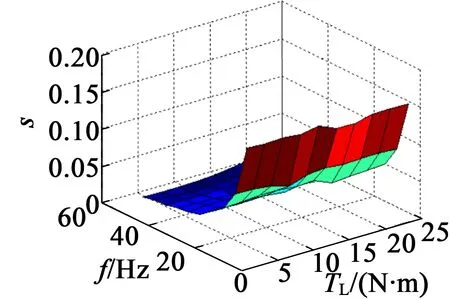
图4 优化系统转差率与力矩、频率关系图
补偿电压Vcom可以按照下式计算:
(3)
式中:Ki为积分常数。
上式可通过在优化驱动系统中增加一个积分作用的反馈环路来实现。
3 优化驱动系统分析
在此将具有转差率补偿的优化系统的效率与V/f=常数的初始系统在相同的操作条件下进行定量分析,所得运行频率为10Hz时转矩与效率关系,如图5所示。可以看出,效能优化控制方案增加了驱动系统的效率,使其在各种负载条件下能够基本保持恒定。同时根据现场实测数据显示,转差率补偿降低了大约4%的能耗,达到了节能效果。
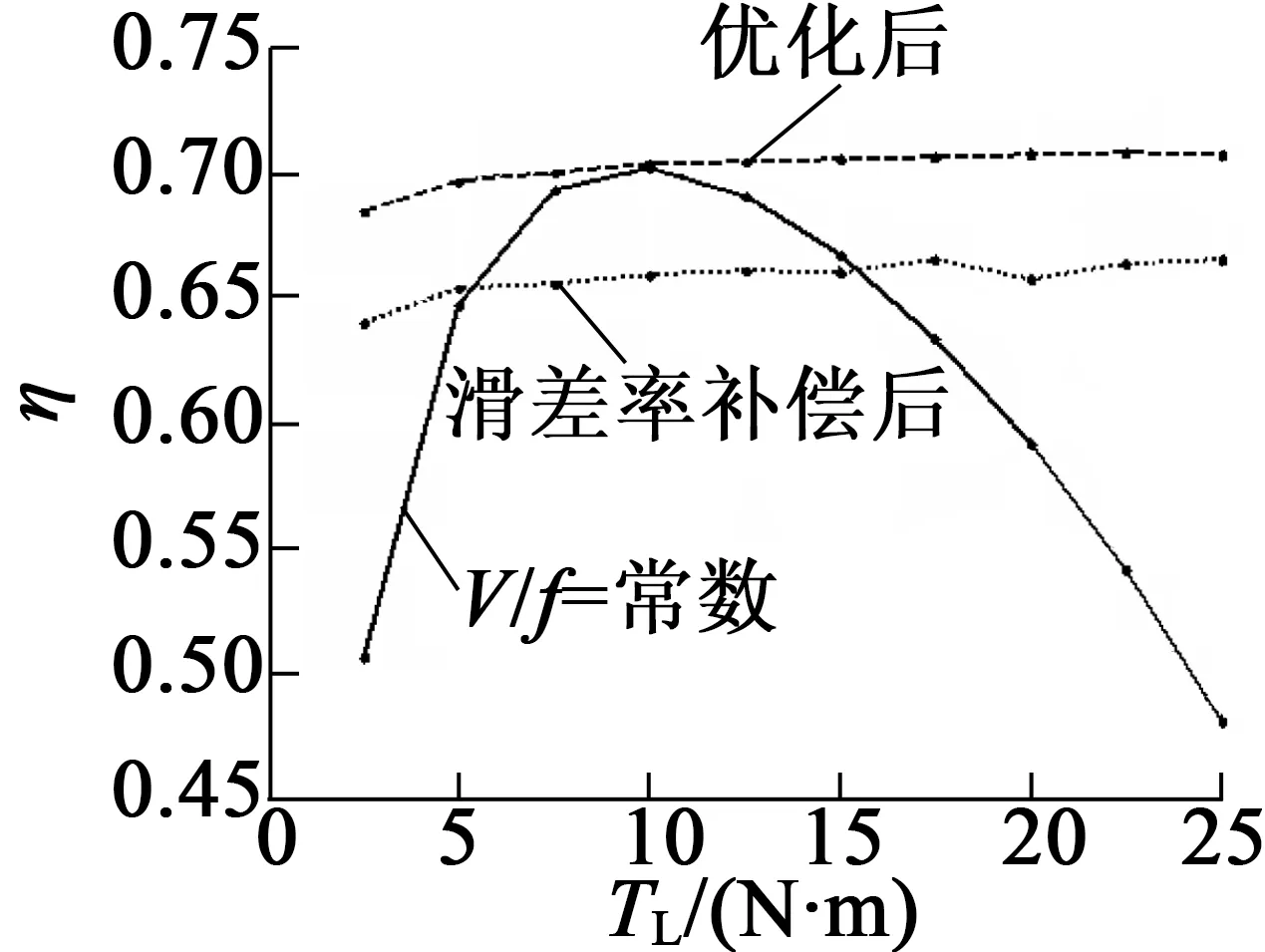
图5 频率为10 Hz情况下效能与转矩关系图
图6给出了效能与频率在负载恒定为10N·m条件下的关系,从图中可以看出,优化算法对于驱动系统的输出转矩性能并没有明显的影响。

图6 转矩为10 N·m情况下效能与频率关系图
图7显示在负载转矩恒定为15N·m及频率为5Hz时转差率的变化情况,可以看出优化和转差率补偿算法对于控制效果有明显的不同,优化方法的转差率曲线震荡较小,稳定性明显优于转差率补偿算法。

图7 转矩为15 N·m、频率为5 Hz情况下转差率的时间响应曲线
4 结 语
综上所述,基于搜索方法的效能优化控制器,控制器控制定子电压值,使得在给定的工作点之上效能达到最优化的同时能够在很大程度上提高效率。另外,为了将转差率降低到一定的范围,驱动系统中增加了转差率补偿器,在输出特性不变的条件下,综合节能4%以上且转差率更加稳定,使得电机运行更加平稳。该技术可广泛应用于变频、变负载驱动系统,在低频、轻载工作条件下性能提升尤为明显。
[1] 陈伟华,李秀英,姚鹏.电机及其系统节能发展综述[J].电机与控制应用,2008,35(11):1-5.
[2] 陈鹏,赵影,梁雪慧.基于 EMD-EKF 的异步电机效率优化控制研究[J].电气传动,2012,42(11):18-22.
[3] 崔纳新,张承慧,孙丰涛.异步电动机的效率优化快速响应控制研究[J].中国电机工程学报,2005,25(11):120-123.
[4] 刘小虎,谢顺依,郑力捷.一种改进的感应电机最大效率控制技术研究[J].中国电机工程学报,2005,25(6):95-98.
[5] 何光东,俞健,蒋静坪.利用斐波那契法实现交流电机的效率最优控制[J].控制与决策,1999,14(4):349-353.
[6] BLANUSA B,MATIC P,DOKIV B.New hybrid model for efficiency optimization of induction motor drives[C]//2010 Proceedings of ELMAR.IEEE,2010:313-316.
[7] 张立伟,温旭辉,郑琼林.异步电机用混合式模糊搜索效率优化控制研究[J].中国电机工程学报,2007,27(27):83-87.
[8] 李宗臣.基于矢量控制的异步电机效率优化控制研究[D].北京:北京交通大学,2010.
[9] 张立伟,温旭辉,郑琼林. 异步电机用混合式模糊搜索效率优化控制研究[J].中国电机工程学报,2007,27(9):83-87.
Research of Energy Efficiency Control of Three-Phase Induction Motor Based on the Fact Search Method
MENGXin-yuan,FANZheng
(Henan Institute of Technology,Xinxiang 453002,China)
A new control scheme based on search method taking advantage of the fact was proposed. At the operating point (a certain torque and speed), there is only one value of stator voltage that operates the motor at optimum efficiency. By analyzing the simulation results, the rationality of the controller was proved. Under the light loads and low frequencies conditions, a slip compensator was also introduced to reduce the slip.
three-phase induction motor; energy efficiency control; fact search method; slip compensation
2015-10-19
河南省科技厅科技攻关重点项目(122102210256)
TM346
A
1004-7018(2016)08-0076-03
孟昕元(1974-),男,硕士,副教授。