软管安装管卡的夹持力分析与试验验证
2016-11-25谢俊邓相红岳剑锋林臻裕陈达胜
谢俊++邓相红+岳剑锋+林臻裕+陈达胜


摘要: 为缩短软管管卡结构设计周期并降低成本,建立软管及管卡的三维模型和有限元模型,用Abaqus求解管卡夹持力与软管和管卡之间相对位移的关系.抽拉试验表明仿真分析结果与试验结果吻合较好.该仿真分析方法可以为今后的管卡设计提供参考.
关键词:
软管; 管卡; 夹持力; 相对位移; 抽拉试验; 有限元; 设计周期
中图分类号: TE53 文献标志码: B
0 引 言
海缆、脐带缆和软管是海上平台与平台,平台与FPSO之间电力、控制信号、通信及油气等传递的重要载体.铺设开始前和结束后,需要分别将其两端抽拉上平台进行永久锚固,但是在施工过程中,通常采用管卡对其进行临时锚固以完成抽拉工作和保证永久锚固工作的顺利进行.[1]
在实际工程中,根据海缆、脐带缆和软管等的外形尺寸,设计不同结构和尺寸的管卡.一般做法是:根据需要提供的抽拉力大小,基于库仑摩擦理论初步估算所需管卡夹持力的大小;参照以往管卡结构形式,完成管卡初步设计;然后,通过场地试验,观察管卡夹持效果,修改管卡结构;经过多次试验及修改结构,最终确定管卡结构尺寸.这种基于库仑摩擦理论的估算方法,无法考虑构件之间的相对变形,因而无法实现对管卡夹持力的准确估计,在管卡设计过程中需要投入大量的人力和物力,产生较高的资金和时间成本.本文通过建立管卡和软管有限元模型并求解计算,然后与试验进行对比分析,验证计算方法的准确性,为管卡设计提供有效的技术指导,减少试验次数,节约成本.
1 管卡结构设计
根据管卡的抱紧作用要求,利用三维设计软件Pro/E建模[2],设计的管卡结构见图1.由2个半圆板通过螺栓抱紧软管,在半圆板的内表面贴一层胶皮,以保护软管并增大摩擦因数.
2 有限元模型和边界条件
2.1 管卡和软管有限元建模
将三维设计软件建立的实体模型导入有限元软件HyperMesh中进行前处理[3],选择的模块为Abaqus/Standard3D.对管卡和软管划分网格,见图2.模型中单元尺寸约为10 mm,共包含278 790个节点,194 800个单元.此模型分析类型为接触分析,所有单元均采用六面体单元,单元类型为非协调单元C3D8I.非协调单元C3D8I是常规六面体单元C3D8修改而来的,具有较好的弯曲行为,能够消除剪应力.由于非协调效应,C3D8I单元内部增加额外的自由度,使其能消除在弯曲中因为泊松效应产生的僵硬.[4]管卡(除胶皮和软管外)的材质为钢Q235B,屈服强度为235 MPa.[5-6]
2.2 螺栓连接处理
管卡中共有22处螺栓连接,采用connectors中的bolt单元模拟螺栓连接,其主要思想是用2组刚性单元COUP_KIN分别连接2个被连接件的内孔节点,然后再用梁单元连接2组COUP_KIN的中心节点,即B31单元.[7]
2.3 接触的追踪方式和处理
2.3.1 接触的追踪方式
Abaqus/Standard提供2种接触的追踪方式计算接触表面之间的相对滑移:有限滑移和小滑移.
(1)有限滑移.
有限滑移的节点位置更新以主面的真实形状来反映.当接触约束产生时,从面节点将被约束在沿主面形状的路径上滑移,无论其方向与形状是否改变,允许相互接触的部件大变形、转动和大位移滑动.[8]
(2)小滑移.
小滑移追踪方式示意见图4.假定从面节点的位移相对于主面的局部曲率而言比较小,采用主面上相对应于从面节点的近似平面代表主面来更新节点位置.每个从面节点与自己的滑移面接触相互作用,数值计算更有效,但使用上有局限性,必须确定切向位移足够小才可满足其假设.小滑移方式只适用于接触对定义.
2.3.2 管卡与软管接触处理
在螺栓预紧力的作用下,管卡压紧软管;在拉力作用下,管卡与软管产生摩擦力,用于抵抗拉力的作用.
管卡与软管之间存在相对滑移,在其间建立接触对,形式设置为面面接触,滑移类型为有限滑移,摩擦因数取0.1[9].
2.4 边界条件和载荷施加
在HyperMesh中处理完网格、材料属性、螺栓连接及接触后,再导入到Abaqus中定义边界条件和施加载荷.
在软管一端进行约束,约束6个自由度:U1,U2,U3,UR1,UR2,UR3,见图5.
计算模型的载荷为螺栓预紧力和拖拉力.在求解过程中,拖拉力可能超过管卡与软管之间的摩擦力,产生滑移,采用隐式求解方法,进行非线性动态求解.
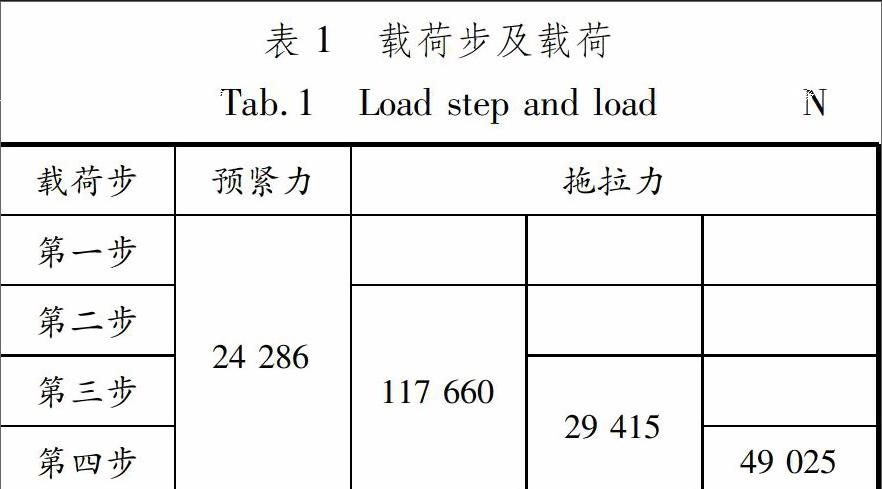
拖拉力的施加分3步进行,第一步载荷大小为1.2×104 kg,第二步载荷大小为1.5×104 kg,第三步载荷大小为2.0×104 kg,均为斜坡加载.
在拖拉力载荷施加之前,先加载螺栓预紧力,通过改变螺栓预紧力大小实现.在拖拉力施加的载荷步中,预紧力的施加通过保持螺栓长度不发生变化来实现,符合螺栓的实际受力情况.
螺栓预紧力大小根据公式T=K×F×d[10]求得,其中K为拧紧力矩因数,F为螺栓预紧力,d为螺纹的公称直径,T为扭矩.
为更好地与试验拖拉力的大小和方向相符,通过刚性单元COUP_KIN连接拖拉板孔上的节点,在COUP_KIN单元的主节点上施加拖拉力(见图5),施加的预紧力大小与拖拉力大小见表1.
在载荷步中设置初始载荷为0.01 N,使得接触缓慢进行,以便求解收敛.设置好边界条件和载荷后,使用Abaqus求解器进行求解计算.
3 模拟抽拉试验
现场准备好试验所需软管、管卡、螺栓、导链、吊带、卸扣和测力计等.在试验中,通过螺栓预紧将2个管卡抱紧软管,其中一个管卡经由吊带和卸扣固定在地面吊耳结构上(见图6),另一个管卡通过吊带和卸扣与测力计相连,再由导链固定在某处结构上.试验前,在管卡与软管接触端部喷上白漆,方便后期测量管卡与软管的滑动情况.在试验中,通过调节导链长度使得吊带张紧,待测力计读数稳定一段时间后,读取其数值;同时,测量此时管卡与软管的相对滑动情况.螺栓的直径为30 mm,使用扭矩扳手进行拧紧,设计安装扭矩为150 N·m.试验用的拖拉力分别为1.2×104 kg,1.5×104 kg和1.8×104 kg.
4 结果分析和试验对比
4.1 应力结果分析
加载螺栓预紧力及最大拖拉力的应力结果见图7,最大等效应力分别出现在螺栓附近和加载区附近,分别为34.7和42.4 MPa.最大等效应力均小于屈服强度,满足强度设计要求.
4.2 计算分析和试验变形结果分析
在试验中,当导链张紧力达到一定程度的时候,软管、管卡和索具等变形,系统出现松弛,测力计读数缓慢减小.在试验操作时,在测力计读数减小的同时,人工张紧导链,使得测力计达到试验的数值,尽量减小试验误差.试验测量的距离为沿软管轴向方向软管与管卡的相对滑移距离,试验结果见表2.
表2中:当拖拉力为1.2×104和1.5×104 kg时,未出现相对滑移;随着拖拉力的增大,在拖拉力为1.8×104 kg时,产生的相对滑移值为15 mm.由试验结果可以判断,开始产生相对滑移的拖拉力为1.5×104~1.8×104 kg,故取此管卡安全拖拉力为1.5×104 kg.
为使计算结果与试验具有对比性,取计算结果中沿软管方向软管和管卡的位移相减,即为软管与管卡的相对滑动距离.计算结果见图8.当时间到3.25 s时,相对滑移值开始急速增长,说明此时拉力刚好克服软管与管卡之间的摩擦力.根据载荷的加载曲线,此时对应的拖拉力载荷为159 kN,即1.625×104 kg.
从试验结果中得知,软管与管卡产生相对滑动的临界拖拉力为1.5×104~1.8×104 kg,计算结果为1.625×104 kg,由于试验的摩擦因数及操作与计算工况存在一定误差,因此可认为在误差允许范围内,即计算结果与试验结果吻合.在试验中,拖拉力为1.8×104 kg时,相对位移为15 mm,而计算结果远大于15 mm.在试验中,当导链张紧到1.8×104 kg时,软管与管卡变形,数值瞬间减小,而计算中则是维持恒定的力,故数值相差较大.
从有限元分析与试验的结果可以看出,管卡的结构强度满足设计要求;同时,在误差范围内,计算结果与试验结果基本吻合,达到数值模拟试验的目的,为今后的管卡设计提供技术指导.
5 结 论
本文以实际工程项目中的管卡与软管为例,进行拉力试验,测量滑移情况;同时,应用有限元软件进行数值计算分析,与试验进行对比,结论如下.
(1)运用HyperMesh对管卡及软管建立有限元模型,得到高质量的六面体网格,同时,使用bolt连接单元,使得模型真实合理,计算精度比较高.
(2)Abaqus在求解接触问题上具有一定优势,并可以施加螺栓预紧力,可以满足本文所描述工程问题的求解要求.
(3)对比有限元分析结果与试验结果,认为计算结果在误差范围内,与试验吻合度较高.计算与试验结果相互验证,使计算结果更加可靠.
(4)本文所描述的有限元法可用于此类管卡的结构设计,节约试验成本,实现有限元分析驱动设计的思想.
参考文献:
[1] 岳剑峰, 叶海宾, 王靖翔, 等. 海缆平台抽拉工艺方法研究[J]. 机械工程师, 2015(7): 273-275. DOI: 10.3969/j.issn.1002-2333.2015.07.138.
YUE J F, YE H B, WANG J X, et al. Study on the process methods for pulling the subsea cable[J]. Mechanical Engineer, 2015(7): 273-275. DOI: 10.3969/j.issn.1002-2333.2015.07.138.
[2] 邱会朋, 杜贵明. Pro/E产品现代设计方法与实例精解[M]. 北京: 清华大学出版社, 2009: 44-47.
[3] 王钰栋, 金磊, 洪清泉, 等. HyperMesh & Hyperview 应用技巧与高级实例[M]. 北京: 机械工业出版社, 2012: 79-82.
[4] 匡博. 盘式制动器制动噪声有限元分析[D]. 长沙: 湖南大学, 2013.
[5] 碳素结构钢: GB/T 700—2006[S].
[6] 单辉祖. 材料力学(Ι)[M]. 3版. 北京: 高等教育出版社, 2009: 34-39.
[7] 查生凯, 唐景春. 基于HyperMesh的磁悬浮储能飞轮模态分析[J]. 机械工程师, 2015(7): 10-13. DOI: 10.3969/j.issn.1002-2333.2015.07.007.
ZHA S K, TANG J C. Mode Analysis of magnetically suspended energy storage flywheel based on HyperMesh[J]. Mechanical Engineer, 2015(7): 10-12. DOI: 10.3969/j.issn.1002-2333.2015.07.007.
[8] 江丙云, 孔祥宏, 罗元元. Abaqus工程实例详解[M]. 北京: 人民邮电出版社, 2014: 124-128.
[9] Technical policy board guidelines for load-out: GL 0013/ND[S].
[10 ] 钢结构用高强度大六角头螺栓、大六角螺母、垫圈技术条件: GB/T 1231—1991[S].
