逆向工程与激光制造技术在工艺品上的应用研究
2016-11-23夏名祥石光林陈晨宋恩权
夏名祥,石光林*,陈晨,宋恩权
(1.广西科技大学机械工程学院,广西柳州545006;2.柳州鑫鼎科技有限公司,广西柳州545007)
逆向工程与激光制造技术在工艺品上的应用研究
夏名祥1,石光林*1,陈晨1,宋恩权2
(1.广西科技大学机械工程学院,广西柳州545006;2.柳州鑫鼎科技有限公司,广西柳州545007)
以木鼎工艺品为研究对象,简述了光栅投影测量的基本原理,分析了三点坐标对齐变化算法的实现.使用ATOS光学扫描仪取得木鼎的点云数据,在GOM Inspect软件中构建木鼎数字模型,转换为STL数据格式输入PreForm软件,采用SLA激光快速成型机打印木鼎模型;运用激光内雕加工方法,设计加工出新的玻璃内雕工艺品,为工艺品数字化保护和开发提供一条新的途径.
逆向工程;光学测量;SLA快速成型;激光内雕
0 引言
逆向工程(Reverse Engineering,RE)是在只有产品实物的前提下,使用测量设备获取实物的表面数据,通过三维几何建模的方法重构实物的数字模型,然后将数字模型进行产品分析和再设计、模具制造和加工生产的过程[1].
工艺品、文物和艺术浮雕等物品,通常具有曲面造型复杂、细节特征明显、缺少CAD数据等特点,难以用正向设计的方式得到这些物体的数字模型.运用逆向工程技术,能够得到物体的表面数据模型,并进行相应的设计加工,从而实现对工艺品、文物等物品的保护和开发[2].
本文采用ATOS三维光学测量系统对木鼎进行扫描,得到工艺品的数字模型,采用SLA激光快速成型机加工出工艺品模型;同时在测量的木鼎数据基础上,使用激光内雕机设计加工出新的工艺品,对工艺品的保护和开发有一定的参考作用,具体流程如图1所示.

图1 工艺品保护开发流程图Fig.1 Flow chart for the protection and development of the arts and crafts
1 三维数据采集
物品表面三维数据的采集是重构模型的首要环节,根据测量方式的不同,数据采集系统可以分为接触式测量和非接触式测量两大类.基本原理都是通过测量设备和方法,获得物体表面离散点的几何数据.
木鼎工艺品具有表面纹理复杂、细节特征明显、曲面过渡较大的特点,接触式测量在速度和精度上难以满足实际需要.采用基于结构光法的非接触式测量,能够较好地获取物体表面的几何数据.
1.1光栅投影法
光栅投影法是一类主动式全场三角测量技术,与其他结构光方法不同之处在于:它投影的是一个在空间中周期分布的光栅场,在测量中以相位来描述光栅场的空间分布,并在条纹图像中求出相位得到点的三维坐标[3].
如图2所示,投影点射出的光源在没有放置被测物体时应照射在A点,在CCD上对应的像点为A′点.放置被测物体后,照射到被测物体的C点,从图示方向观察,A点移动到新的位置B点,在CCD上对应的像点为B′点.距离AB包含了高度信息z=H(x,y),即高度受到了表面形状的调制,通过解调变形光栅影线可解算出被测物面的空间坐标.
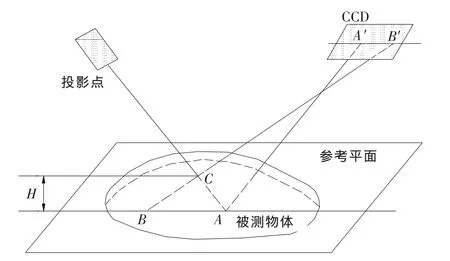
图2 光栅投影测量系统光路图Fig.2 Optical path of grating projection measuring
德国GOM公司研发的ATOS三维光学测量系统利用光栅投影单元,将一组具有相位信息的光栅条纹投影到测量工件表面,左右2个高分辨率数模相机进行同步测量,可以在极短时间内获得物体表面的高密度三维数据.其单幅测量可创建多达4×106个三维坐标点,形状误差不大于0.005mm,整体拼合扫描精度为0.1mm/m[4].
1.2三点坐标对齐变换
在实际测量中,由于受扫描仪测量范围、物体外部形状等因素的影响,需要对物体进行多次测量,然后将测量的多视点云进行数据的对齐和拼接,从而得到完整的反映物体全貌的三维点云数据,为后续操作提供可靠的数据模型[5].
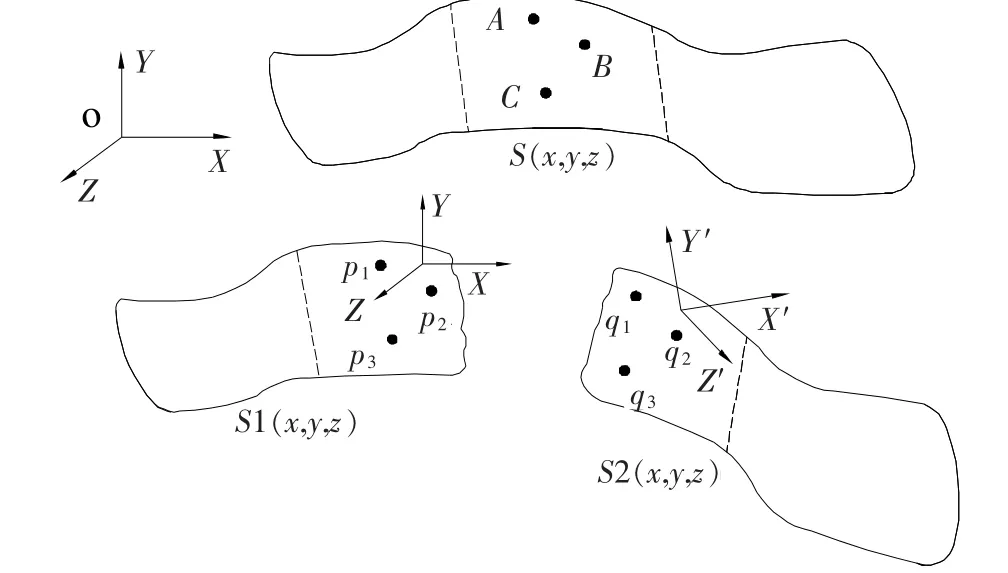
图3 三点对齐示意图Fig.3 Schematic diagram of three point alignment
分块测量的点云数据可看作一个刚体,两块点云数据的对齐属于空间刚体移动;因此,多视点云的对齐可看作空间两个刚体的坐标转换.由于三点可以确定一个完整的坐标系,因而单个零件多次测量的坐标转换可以使用三点对齐变换方法[6].其基本原理如下:
在被测S曲面上选取3个不共线且在2次定位状态下均可测量的点A,B和C,如图3所示.
设第1次测量时A,B和C点的坐标值分别为p1,p2和p3,第2次测得的坐标值q1,q2和q3.
刚体变换通过3个步骤实现:Step1变换p1到q1;Step2变换矢量(p2-p1)到(q2-q1);Step3变换包含3点p1,p2和p3的平面到包含q1,q2和q3的平面.
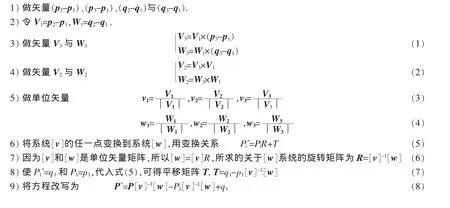
算法如下:
1.3木鼎的ATOS光学测量
在使用ATOS光学测量系统对木鼎进行扫描前,要在木鼎表面随机粘贴5mm的圆形标识点(黑底白圈)作为拼接基准参考点,如图4所示.
多次扫描测量得到的点云数据,通过“三点坐标变换”进行数据拼合:每个单幅测量范围内必须含有3个以上同时也属于上一幅测量的参考点(位于重叠/连接部分),第2批测量的点序列被转化到前一次测量所定义的坐标系中,测量数据拼合如图5所示.
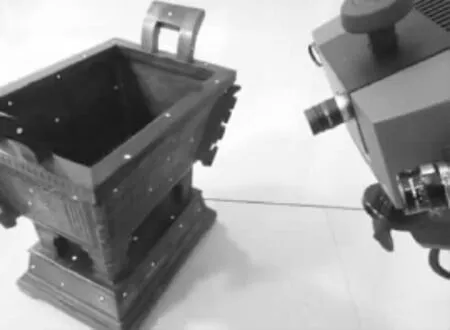
图4 木鼎的ATOS光学测量Fig.4 ATOS optical measurement of wooden tripod
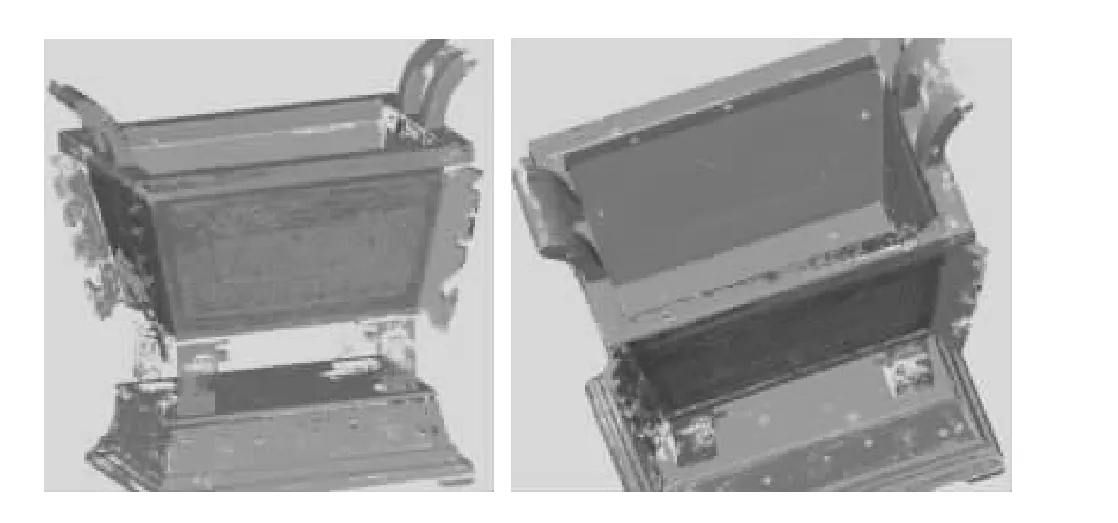
图5 测量数据拼合Fig.5 Registration of measuring data
ATOS系统测量的第一幅数据将确定物体在ATOS Professional中的坐标系,通过ATOS逐步对木鼎的4个侧面、内外面、上下面等进行多次测量,得到不同测量视图下的点云数据,ATOS Professional将利用参考点把不同的视图对齐和拼合到一个坐标系中,从而得到木鼎完整的点云数据.
2 数字模型的重构
完成木鼎测量得到完整的点云数据后,需将测量的点云转变到一个没有重叠的、由不同三角形组成的网格里[7].通过GOM Inspect软件进行多边形计算,并进行网格编辑,包括补孔、创建网格桥、光顺网格和稀化网格等操作,实现测量数据预处理.
在数字化测量物体时有时可能无法涉及所有表面,缺失数据表现在多边形网格上就是网格上有孔,需要在ATOS软件中修补填上这些缺孔.通过GOM Inspect软件对网格处理,可以得到完整的木鼎多边形网格数据[8],如图6所示,同时可以输出STL格式数据.
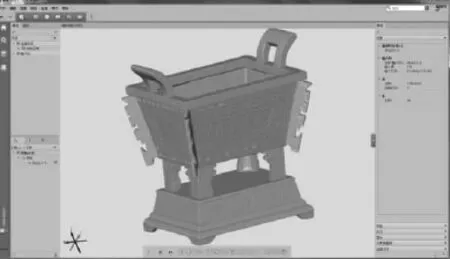
图6 木鼎数字模型Fig.6 Digital model of wooden tripod
3 工艺品保护与开发
3.1SLA激光快速成型
光固化快速成型(Stereo Lithography Apparatus,SLA)技术,是通过计算机控制激光按零件的分层截面信息在液态光敏树脂的表面进行逐点扫描,树脂薄层产生光聚合反应而固化.一层固化完成后,工作台下移一个层厚的距离,依次不断扫描新的一层液态树脂,直至得到完整的三维实体模型[9].
采用SLA工艺加工木鼎的过程主要包括前期数据准备阶段、成型加工阶段和后处理阶段[10].其工艺流程如图7所示.
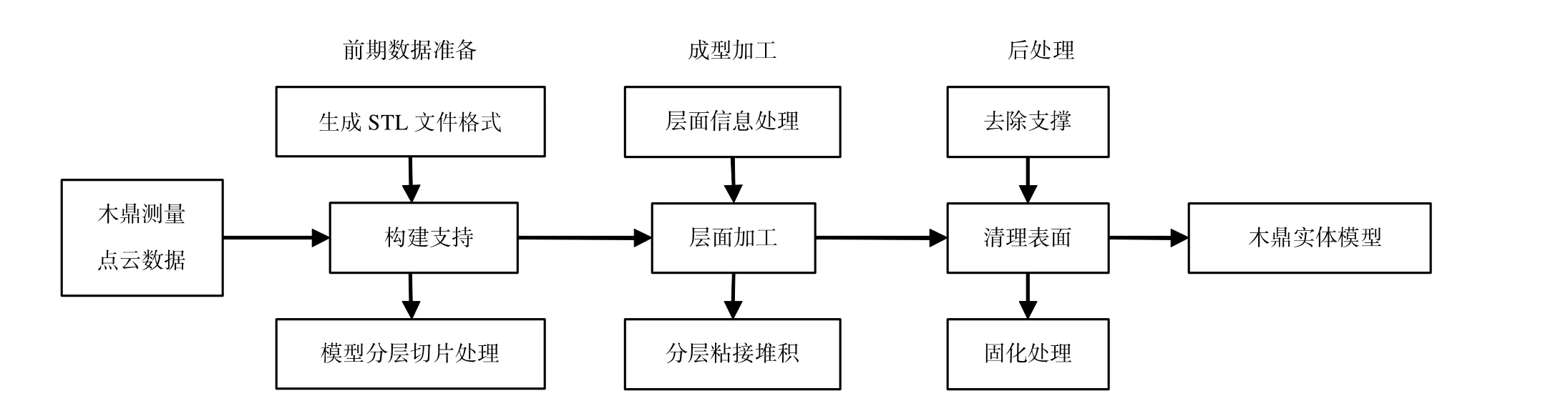
图7 SLA加工工艺流程Fig.7 Machining process of SLA
使用FormLabs型SLA激光成型打印机加工木鼎模型的操作步骤如下:
Step1在液槽中装入液态光敏树脂,将木鼎的STL格式数据输入PreForm软件后,进行模型的移动、旋转、缩放比例等布局操作,设置模型支撑结构的间距和斜度系数,查看模型的分层切片数据;
Step2完成模型预操作后,连接打印机进行打印,激光束将材料进行逐层打印,直至完成打印.
最终打印模型如图8所示.

图8 木鼎的快速原型模型Fig.8 Rapid prototype model of wooden tripod
3.2激光内雕加工
激光内雕技术是内部破坏技术,它通过计算机控制激光束的扫描路径,使激光束在玻璃体内部聚焦.激光束的能量密度在需要加工的区域超过玻璃的破坏阈值,能够在瞬间使玻璃受热破裂,产生大量微米量级大小的爆裂白点,从而在玻璃内部雕出预定的2D/3D形状,而玻璃其余未爆裂的部分则保持原样完好无损[11].
本文所述HSGP-3KC型激光内雕机采用半导体泵浦固体激光技术,产生的激光经倍频处理输出波长为532 nm的激光,侧面泵浦结构原理如图9所示[12].激光内雕机通过专用点云转换软件将二维或三维图形转换成点云数据,振镜扫描器在计算机控制下高速摆动,同时工作台进行联动运行,输出激光在玻璃中扫描点的位置,从而完成点云图像的激光内雕加工.
HSGP-3KC型激光内雕机的激光波长为532 nm,激光频率3 000Hz,最快雕刻速度为3 500点/s,进行木鼎工艺品的加工步骤如下:
Step1点数据生成.将木鼎的模型数据转换为DXF格式文件,输入Dot Cloud软件中,进行模型调整,设置加点方式为线面加点,输入线点距、面点距值,生成点云数据,保存DXF点云文件;
Step2激光雕刻.将计算的木鼎DXF点云文件导入雕刻加工软件中,设置玻璃体和工作台尺寸,完成设置后,开始激光加工,得到的木鼎玻璃内雕工艺品如图10所示.
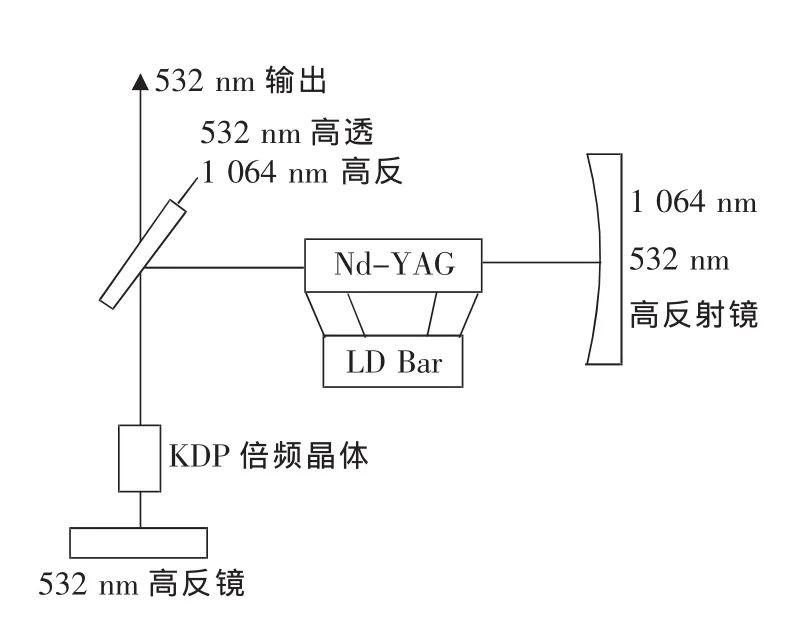
图9 侧面泵浦结构原理Fig.9 Principle of side pump laser

图10 木鼎激光内雕工艺品Fig.10 Crafts of wooden tripod made by laser carving
4 总结
采用ATOS三维光学扫描系统对具有复杂型面及细节特征的木鼎进行表面数字化,解决了以往测量精度难以满足实际需要的难题.运用SLA快速成型与激光内雕技术,成功地实现了木鼎的复制与开发,为此类工艺品或文物的保护开发提供了新的途径和手段.
[1]张德海,李艳芹,谢贵重,等.三维光学扫描技术逆向工程应用研究[J].应用光学,2015,36(4):519-525.
[2]成思源.逆向工程技术综合实践[M].北京:电子工业出版社,2010.
[3]达飞鹏,盖绍彦.光栅投影三维精密测量[M].北京:科学出版社,2011.
[4]张坤,冯兰芳,惠延波,等.基于逆向工程技术的某微客车排气系统的快速开发[J].制造业自动化,2014,36(16):30-33,42.
[5]康兰,冯亚娟,陈正鸣.多视点云数据快速对齐方法[J].机械设计与研究,2009,25(1):7-9,14.
[6]牟小云.基于RE/RP集成的复杂外型产品快速成型技术研究[D].西安:西安理工大学,2008.
[7]胡迎春,余兵浩,欧亚龙.人体腰椎节段CT图像的反求建模和有限元分析[J].广西科技大学学报,2014,25(2):13-16.
[8]靳龙,袁爱霞,胡迎春.基于Mimics和ProE的人体腰椎生物力学分析[J].广西工学院学报,2013,24(4):45-49.
[9]龚运息.基于SLA和FDM的3D打印发动机风扇工艺与性能分析[J].制造技术与机床,2015(11):111-115.
[10]刘杰.光固化快速成型技术及成型精度控制研究[D].沈阳:沈阳工业大学,2014.
[11]何文浩.三维激光微雕技术在玻璃深加工中的应用发展[J].硅酸盐通报,2015,34(S):311-313.
[12]苏维均,刘贇喆,王群.激光内雕机的使用及相关问题的解决方案[J].北京工商大学学报(自然科学版),2008,26(3):25-28.
(学科编辑:黎娅)
Application and research of reverse engineering and laser manufacturing technology in the arts and crafts
XIA Ming-xiang1,SHI Guang-lin*1,CHEN Chen1,SONG En-quan2
(1.School of Mechanical Engineering,Guangxi University of Science and Technology,Liuzhou 545006,China; 2.Liuzhou Xin Ding Technology Co.,Ltd.,Liuzhou 545007,China)
Taking a wooden tripod craft as the research object,the basic principle of grating projection measurement is described briefly.The realization of the three point coordinate change algorithm is analyzed.The point cloud data of wooden tripod has been obtained by using ATOS optical scanner.The digital model has been established with the GOM Inspect software.And it is converted to STL data format to input PreForm software,using SLA laser rapid prototyping machine to complete the model of printing;the laser processing method has been used to design and process the new glass carving arts and crafts.And this provides a new way for the digital protection and development of arts and crafts.
reverse engineering;optical measurement;SLA rapid prototyping;laser engraving
TB472
A
2095-7335(2016)03-0045-05
10.16375/j.cnki.cn45-1395/t.2016.03.008
2016-02-25
广西科技开发计划项目(桂科能1598024-2-1)资助.
石光林,教授,研究方向:先进制造技术,E-mail:sgl8913@163.com.
