基于特征点光流聚类的复杂背景中运动车辆检测
2016-11-23李忠海李建伟
李忠海,李建伟
(沈阳航空航天大学自动化学院,沈阳 110136)
基于特征点光流聚类的复杂背景中运动车辆检测
李忠海,李建伟
(沈阳航空航天大学自动化学院,沈阳110136)
为了准确、快速的在动态场景中对运动车辆进行检测,提出一种基于特征点光流聚类的车辆检测方法;该方法取Harris角点为车辆特征量,通过特征点匹配来剔除一些没有运动的干扰角点,然后对剩余的特征点做光流提取并利用模糊U邻域(FUNN)聚类算法实现光流的聚类,从而剔除噪音、孤立点和不感兴趣样本实现前景和背景的分离,最后通过设定阈值判断前景目标是否是车辆;实验结果证明在复杂的动态场景中该算法对遮挡、光照变化、阴影处理等有很好的鲁棒性,相较于其他算法具有更高的车辆识别率。
特征提取;光流法;FUNN聚类;车辆检测
0 引言
目前,关于车辆检测的算法有很多,常用的算法主要有帧差法、背景减法和光流法[13]。上述几种算法在理想情况下都能成功检测到运动车辆,但是在实际生活中,由于目标车辆所处环境复杂、背景多变,使的车辆的检测变的比较复杂,主要表现在以下几点:目标遮挡、光照变化、阴影等。本文中提出的特征点光流聚类算法在复杂的场景下能有效的抑制遮挡、光照变化、阴影等干扰因素带来的影响,提高车辆检测的准确率和效率,非常适用于交通监控中的车辆检测。
1 算法流程
1.1Harris角点提取
为了避免遮挡、光照变化等干扰因素的影响,我们需要在视频序列中提取车辆不变特征量来实现车辆的检测。由于选择特征的可靠性直接影响算法的准确率和效率,因此选择合适的特征量是非常有必要的。通常,我们会选择提取图像序列中的直线或点作为特征量。提取直线的常用方法是随机Hough变换,而提取点的常用方法有边缘检测、角点检测等。本文针对交通监控视频的特点选择Harris角点作为特征量[45]。
Harris角点的检测算法如下:

式(1)和式(2)为Harris角点检测的像素相关函数。其中I为图像的像素矩阵,w为减少噪声的平滑窗口函数,(x,y)为相应图像的像素坐标。I(x,y)为(x,y)点像素值,IxIy分别为图像中像素在水平方向和垂直方向上的一阶偏微分,I2xIy2分别为图像中像素在水平和垂直方向上的二阶偏微分,(u,v)为图像中像素偏移坐标。最后,计算角点响应函数R,从而得到图像角点。
R=λ1λ2-k(λ1+λ2)2(k∈[0,0.06])(3)λ1,λ2为矩阵M的特征值。k为经验值。
Harris角点检测运用于车辆检测中起到了很好的效果,并且Harris角点对于光照变化和遮挡等干扰因素有很好的鲁棒性。图1为对视频序列中第89、90帧图像提取Harris角点后的图像。
1.2角点匹配去干扰
由图1可以看出,Harris角点能很好的反映车辆的特征信息,但是也有很多与车辆无关的角点被检测出来,在对车辆进行识别时有很大的干扰作用。为了去除那些与车辆无关的角点,利用相邻视频帧的相关性来去除一些无运动的角点。
首先,从视频序列中提取两帧视频,分别对两帧图像做角点检测(如图1),将图(a)中角点集合记为E1,图(b)中角点集合记为E2。然后对E 1中角点进行判断,看其在E 2中是否依然存在,若存在则说明是无运动的角点,将其删掉。若在E 2中不存在,则保留。同样,对以后的视频帧进行相同的处理。对图1中 (a)图做去除无运动角点处理后的图片如图2所示。
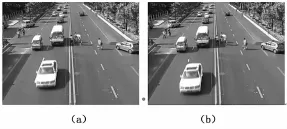
图1 第89、90帧图像做Harris角点提取结果

图2 图1(a)去除无运动角点结果图
1.3特征点光流提取
本文采用金字塔Lucas-Kanade光流法对图2中特征点进行光流提取[610]。
算法流程如下:首先,对金字塔最上层图像的光流做出计算,根据计算结果求出次上层光流的初始值,然后再估算次上层光流的实际值。最后,再用次上层的光流结果估算其下一层的光流初始值,估算其实际值后再利用其值计算下一层的光流值,直至金字塔的最底层。光流提取结果如图2所示。
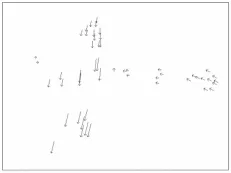
图3 图2中角点的光流场
1.4光流聚类
通过计算Harris角点的光流场,可以得到光流链和角点链,由于同一个目标角点的光流近似相同,不同目标的角点光流都不相同,可以先对光流链进行一次聚类,然后再根据同一目标上的角点分布规律再对角点进行一次空间聚类[1112]。
本文采取模糊U邻域聚类算法(FUNN)对角点光流进行聚类分析,在通过对聚类的面积大小设定阈值来判断聚类类别是否为车辆。
模糊U邻域聚类算法(FUNN)是基于数据集特征的模糊特征软性聚类,具体的算法步骤如下:
首先给控制参数赋值并初始化聚类的中心和个数。设定聚类的中心个数为C、类中最小的隶属度阈值为θU、类中最小的特征点个数百分比为θN、最大迭代次数为I、模糊权重系数m=2.0、当前的迭代次数l=0。参数设定完毕后计算隶属度矩阵U和聚类中心V。
然后通过下面两式来计算特征点的隶属度矩阵和聚类中心。上式中,,若dij=0,则使uij=1,且当i≠j时,uij=0。
上式中K为特征点总个数,uij为隶属度系数,xi为第i个特征点。
若uij>uik,k=1,2,3,.....,C且j≠k,则xi∈Sj。并且当某个类中的特征点数目不大于θN,则把此类除掉,并把类中的特征点重新分类。将其与剩下的一些未进行分类的特征点,重新组建一个新的集合。将新的集合送入基于统计信息的聚类算法模型中,设置初始聚类数C=1,输出结果为新类的类中心vnew。如果对新类的隶属度不小于θU的特征点数不少于θN,则增加新类。
该算法采用FCM算法更新聚类中心和隶属度矩阵,保证了分类的准确性。采用U邻域思想对隶属度系数进行约束,可以剔除噪音和孤立点;对类内样本数目进行约束,可以控制类的规模;通过建立补充新类模型,可以避免初始聚类中心的个数不能完整表述特征点类别的可能。
对上文中特征点光流场利用该聚类算法进行分类后,用最小的且包含类中所用特征点的矩形将类标记出来,然后计算矩形的面积,设定面积阈值,通过矩形面积与设定的面积阈值相比较去掉一些不是车辆的类。得到结果图如图4所示。

图4 车辆检测结果
由图4可以看出,一些噪音、孤立点和不感兴趣的特征点可以被有效的剔除掉。当设定的面积阈值太小时,算法可能把行人也判断成车辆,从而造成误检。而如果把阈值设的太大,也可能造成远处的车辆无法识别。因此阈值的设定是算法中关键的环节。但是总体来说,算法的分类准确性、稳定性和自适应能力还是比较强的,对于目标遮挡、阴影、光照变化等产生的影响具有很好的鲁棒性。
2 实验和数据分析
本文中采用三段经典的运动车辆视频对本文算法进行实验验证。视频(a)中车辆的种类不同,大小不一,路边树木等干扰因素较少。视频(b)中车道是横向的,是从高空俯拍的视频,车辆较小且车辆行驶缓慢,识别难度较大。视频(c)中车辆的个数比较少,视频中也几乎没有什么干扰因素。视频的数据参数如表一所示,视频截图及视频数据如图5所示。

图5 实验视频截图及视频数据
对三段视频进行车辆识别分析,本文比较混合高斯背景建模[13]、改进的帧间差分算法[14]以及本文算法几种算法的检测结果如表2所示。
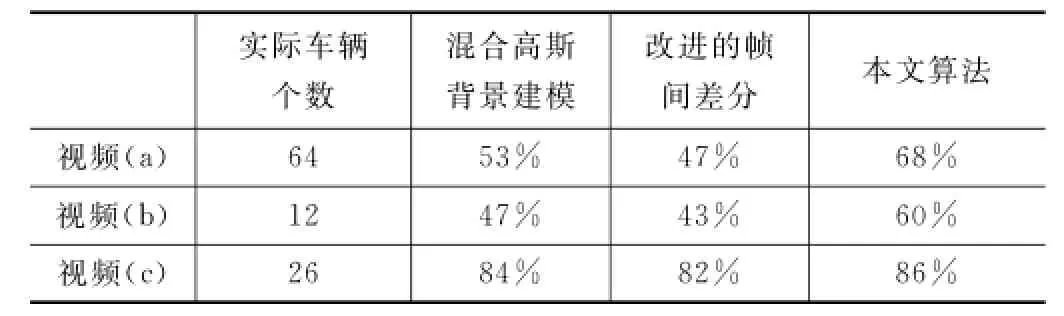
表2 实验视频车辆检测结果
由上述的实验结果可知,对于视频(c),3种算法的车辆识别率差不多,但在复杂的背景环境下(视频(a)和视频(b)),本文算法具有更高的车辆识别率。
3 结束语
本文中提到的基于特征点光流聚类的运动车辆检测算法,利用对Harris角点做光流提取,并利用FUNN聚类算法对特征点光流做聚类分析,有效避免了遮挡和光照变化对车辆检测带来的影响,并且提高了在动态背景下对运动车辆的识别率,非常适用于交通监控中的车辆检测。但是由于算法没有考虑视频图像的尺度变化,使得算法在对较远车辆或在视频图像中较小的车辆目标进行检测时有可能出现漏判或误判。
[1]Y Fan.A real-time algorithm of dynamic background extraction in image sequence[A].Proc.4th IEEE Int.Conf.on Machine Learning and Cybernetics[C],Guangzhou:IEEE,2005,4997 5000.
[2]Takatoo M,Kitamura T,Okuyama Y,et al.Traffic flow measuring system using image processing[A].Proc.SPIE 1197,Automated Inspection and High-Speed Vision Architectures III[C],Philadelphia:SPIE Digital Library,1989,172-180.
[3]Hsieh J W,Yu S H,Chen Y S,et al.Automatic traffic surveillance system for vehicle tracking and classification[J].IEEE Transactions on Intelligent Transportation Systems,2006,7(2):175- 187.
[4]龚平,刘相滨,周鹏.一种改进的Harris角点检测算法[J].计算机工程与应用,2010,46(11):173-175.
[5]徐伟,王朔中.基于视频图像Harris角点检测的车辆测速 [J].中国图像图形学报,2006,11(11):1650-652.
[6]胡金金.基于光流法的运动目标快速跟踪算法研究[D].西安:西安电子科技大学,2014.
[7]李喜来,李艾华,白向峰.智能交通系统运动车辆的光流法检测[J].光电技术应用,2010,25(2):75-78.
[8]胡觉晖,李一民,潘晓露.改进的光流法用于车辆识别与跟踪[J].科学技术与工程,2010,10(23):5814-5817.
[9]陈聪,朱煜,肖玉玲,等.一种有效的车辆跟踪算法与异常车辆检测[J].华东理工大学学报(自然科学版),2015,41(2):205-209.
[10]高磊.基于光流的动态场景中运动车辆检测与跟踪算法研究[D].合肥:中国科学技术大学,2014.
[11]裴巧娜.基于光流法的运动目标检测与跟踪技术[D].北京:北方工业大学,2009.
[12]孙季丰,王成清.基于特征点光流和卡尔曼滤波的运动车辆跟踪[J].2005,33(10):19-23.
[13]韩明,刘教民,孟军英,等.一种自适应调整K-r的混合高斯背景建模和目标检测算法[J].电子与信息学报,2014,36(8):2023-2027.
[14]王振亚,曾黄麟.一种基于帧间差分和光流技术结合的运动车辆检测和跟踪新算法[J].计算机应用与软件,2012,29(5):117-129.
Moving Vehicle Detection in Complicated Background Based on Optical Flow of Feature Points
Li Zhonghai,Li Jianwei
(School of Automation,Shenyang Aerospace University,Shenyang110136,China)
In order to detecting the moving vehicles accurately and fast in dynamic scene,this paper proposes a vehicle detection method based on optical flow clustering of feature points.Harris corner points are chosen to form a feature vector of vehicles in this method.We remove the interference corner points that are not moving based on feature matching.Then we extract the optical flow of the feature points. we remove the acnode noise and non-interesting samples and realize the separation of foreground and background by the Fuzzy U Nearest neighbor Adaptive Clustering of the optical flow.Finally,we determine whether the foreground is a vehicle by setting the threshold.The experimental results show that this algorithm is good to cover,illumination and shadow.It has a high recognition rate to vehicles in complex dynamic scene.
feature extraction;optical flow;FUNN clustering;vehicle detection
1671-4598(2016)05-0234-03
10.16526/j.cnki.11-4762/tp.2016.05.066
TP391
A
2015-11-19;
2015-12-22。
李忠海(1962-),男,辽宁沈阳人,教授,硕士生导师,主要从事图像处理、计算机视觉方向的研究。
