不稳定时滞对象的二自由度控制器设计
2016-11-23杨淇茜靳其兵蒋北艳
杨淇茜,王 琪,靳其兵,蒋北艳
(北京化工大学 信息科学与技术,北京 100029)
不稳定时滞对象的二自由度控制器设计
杨淇茜,王琪,靳其兵,蒋北艳
(北京化工大学信息科学与技术,北京100029)
在工业生产过程中,特别是化工领域,许多单元属于开环不稳定过程,特别还存在时滞特性;针对此情况,提出了一种二自由度响应控制结构,该结构优点是设定值跟踪与扰动响应完全解耦,分别对设定值跟踪控制器和扰动控制器两个参数进行独立调节,而无需进行折中,保证了系统的稳定性和鲁棒性;最后对一阶二阶不稳定时滞系统的仿真结果表明,所提出的二自由度控制结构能够有效地解决系统的稳定鲁棒性和扰动抑制作用。
时滞不稳定对象;二自由度;鲁棒性
0 引言
化工过程中经常遇见不稳定时滞对象,比如反应器温度控制。由于右半平面极点和纯滞后的存在,闭环系统容易产生较大的超调和较长的调节时间。因此,不稳定时滞过程的控制一直广受关注。许多学者提出了针对不稳定对象的有效单回路控制方案。单位反馈的控制方案虽然简单,但是这种一自由度结构中设定值跟踪与抗负载扰动的设计没有分离,控制器的设计不能同时获得良好的设定值跟踪性能和抗扰性能。基于以上考虑,针对不稳定对象的二自由度控制方案相继提出。文献[1]中,Lee等人采用迈克劳林级数方法将内模(Internal Model Control,IMC)控制器展开转化为PID控制器,同时增加设定值滤波器构成二自由度控制方案,从而获得良好的设定值跟踪和扰动抑制性能,但文中参数都靠经验获取,并没有提出具体的参数整定规则。在文章[2-4]也存在类似的缺点。文献[5]中,Yang等人使用搜索算法得到PID控制器的参数,计算量较大,同时由于没有严格的解析设计方法,使得该方法不利于现场使用。文献[6]中,在文献[1]的基础上,提出了针对抗扰性能的IMC-PID的设计方法。但是,文中并没有详细分析控制系统的鲁棒/性能平衡问题,因此没有得到一定鲁棒条件下最优的控制器。文献 [7]将二自由度用于动态响应和积分过程,从而解决了由于阶跃扰动引起的稳态输出误差和斜坡扰动引起的响应慢等问题。本文针对典型的带有时滞不稳定对象,利用Pade逼近方法,对时滞部分进行估计,详述了3个控制器的两个参数与系统输出性能和鲁棒性的关系。提供了控制参数的解析整定规则。在整定不稳定过程的基础上,完全消除了设定值响应和扰动响应控制性能的耦合。
1 二自由度控制结构
传统的并行控制结构如图1所示,gc1为设定值跟踪器,gc2为扰动控制器,gm为标称模型,gp为实际模型,r,y和d分别为控制系统的输入、输出和干扰信号,u1和u2分别是控制器gc1和gc2控制信号。

图1 并行结构图
本文对传统的并行结构增加了第3个控制器gc,主要用来稳定系统无时滞部分。改进的控制结构如图2所示,gm0为被控模型gm的无时滞有理部分,即,为纯滞后部分。由控制结构图2,可得:

若对象模型精确,即,则:

由此可以看出,在标称情况下,此结构同时兼顾了设定值响应和扰动抑制作用,并且两者之间的控制已经完全解耦,不存在设定值响应和抗干扰抑制的折中情况。
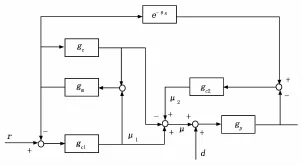
图2 改进结构图
2 控制器的设计
根据以上关系式可以看出,gc视为对无时滞不稳定系统分的稳定控制器,gc2为设定值跟踪控制器,通过关系式可以看出,设定值跟踪不依赖于gc2,所以第一步主要是设计设定值跟踪控制器。但是对于稳定对象,我们可以通过调节控制器得到满意的设定值跟踪响应,然而闭环系统的负载响应却要依据控制器gc2来调节。
2.1设定值跟踪控制器
本文主要讨论三类时滞不稳定系统分别是:一阶时滞不稳定系统-θs,二阶带积分时滞不稳定系统gm2,二阶时滞不稳定系统gm3(s)=。
首先考虑一个一阶不稳定系统,gc=Kc,gc1=Kp1(1+,为了保证开环系统的稳定性,即1+gm0gc=0,则kck>1。把gc,gc1,gm0,gm带入式(2)可以得到:

期望的数学表达式如下:

对比式(4)和式子(5)我们可以得到一阶时滞不稳定系统模型的控制器设定值:


运用此方法可以得到带有积分二阶时滞不稳定系统和二阶时滞不稳定系统模型的控制器设定值,见表1。

表1 设定值控制器参数设置
其中λ为待整定参数。
2.2扰动抑制控制器
针对与一阶时滞不稳定系统,由闭环传递函数可知:设定扰动控制器为:对于二阶系统:


把和gc2带入式子(6)可得:


令:

根据式子(9)和式子(10),可得:
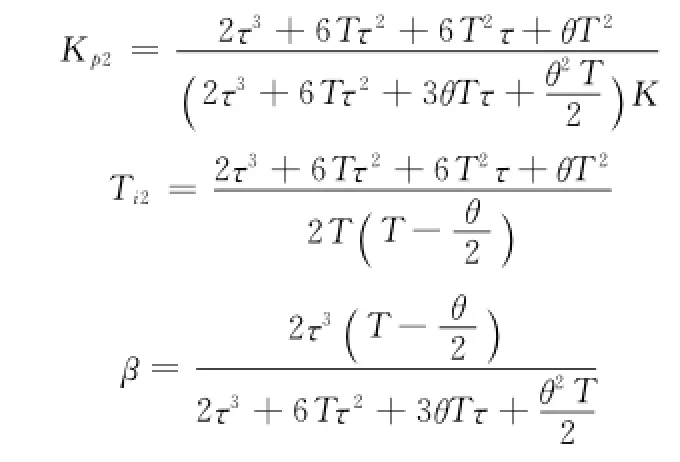

表2 扰动控制器参数设置
对于带有积分二阶时滞不稳定系统和二阶时滞不稳定系统模型的抗扰控制器参数设置见表2。
3 仿真实验
3.1一阶时滞过程对象
考察一阶不稳定对象:

本文方法与Lee和Liu的方法进行比较。在Liu的文献中,控制器滤波器参数λc选择为0.4。为了相同对比本文取Kc=4,Kp1=0.5,Ti1=0.25,Kp2=1.788 7,Ti2=4.989 5,β=0.098 4。针对上述对象,在0 s加入幅值为1的设定值。在5 s时添加幅值为-1的输入扰动。仿真比较如图3,4所示,对比3种方法的仿真曲线发现,本文的方法具备更好的设定值跟踪和抗负载扰动。

图3 4.1的时间响应系统
3.2二阶积分时滞过程对象
考虑含有积分的不稳定对象:

在Liu的方法中λc选为0.2。为了有相同的响应速度,本文取λ=0.36,τ=0.01,在0 s和20 s时分别加入幅值为1的设定值和幅值为-0.1的输入扰动,图5为3种方法的仿真

图4 4.1模型失配时的输出
比较。

图5 4.2的时间响应
3.3二阶时滞过程对象
考察两个不稳定极点的对象:

在Liu的方法中,λc选择为0.5。本文取Kc=66.166 7,td=4.007 6,Ti1=0.018,Kp2=4.007 6,Ti2=1.552 3,β = 0.098 4,Td2=1.259。图7为3种方法的仿真比较。在上述3种方法中,本方法具备最好的动态性能。对象增益及时滞增加5%,图8为此时系统的时间响应。

图6 4.2模型失配时系统的输出

图7 4.3的时间响应

图8 4.3模型失配时系统的输出
4 结论
通过研究可知,针对此二自由度控制结构可以很好地解决系统的鲁棒性和扰动抑制,分别通过调节两个控制器的参数,实现了设定值响应和抗负载扰动的完全解耦。不仅能偶抑制由于不稳定和时滞带来的影响,而且对于参数变化引起的模型失配有较强的适应性。从而,为时滞不稳定系统的控制提供了另一个行之有效的结构方法。
[1]Hua M C,Lou D C,CHANG M C.Dual-Wrapped digital watermarking scheme for image copyright protection[J].Computers& Security,2007,16 (1):1-12.
[2]Nasution A A,Jeng J C,Huang H P.Optimal H 2 IMC-PID Controller with Set-Point Weighting for Time-Delayed Uns Table Processes[J].Industrial & Engineering Chemistry Research,2011,50 (8):4567-4578.
[3]Zhang W,Gu D,Wang W,et al.Quantitative performance design of a modified Smith predictor for uns Table processes with time delay[J].Industrial&engineering chemistry research,2004,43 (1):56-62.
[4]Tan W,Marquez H J,Chen T.IMC design for uns Table processes with time delays[J].Journal of Process Control,2003,13 (3):203-213.
[5]Nasution A A,Jeng J C,Huang H P.Optimal H 2 IMC-PID Controller with Set-Point Weighting for Time-Delayed Uns Table Processes[J].Industrial & Engineering Chemistry Research,2011,50 (8):4567-4578.
[6]Shamsuzzoha M,Lee M.Enhanced disturbance rejection for openloop uns Table process with time delay[J].ISA transactions,2009,48 (2):237-244.
[7]Liu T,Gao F R,Enhanced IMC Design of Load Disturbance Rejection for In-tegrating and Unstable Processes with Slow Dynamics[J].ISA Transactions,2011,50(2),239248.
[8]赵志诚,文新宇.内模控制及其应用[M].北京:电子工业出版社,2012.
[9]Hui-He S.一种基于灵敏度的自整定最优 PI控制器[J].自动化学报,2001,27 (01):140-143.
[10]Liu T,Gao F R,Wang Y Q.IMC-based iterative learning control for batch processes with uncertain time delay[J].Journal of Process Control.2010,20 (2):173-180.
[11]Zhang WD,Gu D Y,Wang W,et al.Quantitative performance design of a modified Smith Predictor for unstable processes with time delay[J].Industrial Engineering &Chemica Research,2004,43 (1):56-62.
Two-degree-of-freedom Control Structure for Unstable Processes with Time Delay
Yang Qiqian,Wang Qi,Jin Qibing,Jiang Beiyan
(Beijing University of Chemical Technology,Beijing100029,China)
Two degree of freedom control structure is proposed for unstable processes with time delays.The tuning parameters in our approach are settled by their impact on system performance and robustness.Our method offer a reliable range tuning parameter,which is lacked in other control scheme.Illustrate simulation example can demonstrate the advantage of our scheme in nominal and perturbed response.
time-delay unstable system;two degree of freedom;robust
1671-4598(2016)05-0081-03
10.16526/j.cnki.11-4762/tp.2016.05.024
TP3
A
2015-08-06;
2016-03-23。
国家自然科学基金(61273132)。
杨淇茜(1990-),女,辽宁本溪人,硕士研究生,主要从事复杂工业过程优化与控制方向的研究。
