新型高空救援逃生装置的研制
2016-11-22王占辉
王占辉
(天津中德应用技术大学,天津 300350)
Research and Exploration | 研究与探索·探讨与创新
新型高空救援逃生装置的研制
王占辉
(天津中德应用技术大学,天津 300350)
为实现紧急情况下的高空逃生,研制出一种新型高空救援逃生装置,该装置采用纯机械结构,使用简单易懂的操作方式,通过杠杆原理为不同体重的人提供相应大小的摩擦阻力,装置不需要进行预先的设置,同时,该装置具有单向自锁功能,不仅能够满足紧急现场逃生还能够满足从地面到高空的现场救援。
高空救援;高空逃生;杠杆
目前,国内应对高空逃生主要还是依靠消防官兵救援,对于自救式的逃生设备应用缺乏,因此设计一种可靠高效且操作简便的逃生设备是非常有必要的。现有资料显示,高空救援类的设备主要是通过离心、液压、弹簧等产生阻尼进行缓降,设计的原理各有差异,但往往需要进行一定的调节来适应不同体重的人,产生相应的摩擦阻力。本文所述的新型高空救援逃生装置,区别于现有逃生机构,采用杠杆原理,具有自适应性,可以为不同体重的逃生者提供相应大小的摩擦阻力,保证逃生者安全到达地面。在逃生过程中不需要进行繁琐的调节,实现了简单快速的目标,与同类产品相比,结构简单,安全可靠,小巧便携,且具有单向自锁特征。
1 工作原理
装置的结构如图1所示,主要通过调节杠杆的支点产生不同的压紧力来控制钢丝绳与摩擦瓦的摩擦力大小从而保证安全下落。利用杠杆原理,将人自身的重力作用于杠杆一端,在另一端给钢丝绳产生相应的压紧力,这个压紧力使摩擦片与钢丝绳产生一定的摩擦力从而平衡人的自重,基本实现匀速下降。再调节摩擦力,使之大于重力,就可减速下将。
2 主要功能及应用场合
(1)主要功能。本装置的主要功能有下降功能和上升功能。①下降功能:在逃生时,人通过安全带与该装置固定,由钢丝绳固定端经钢丝绳传力到杠杆上,支点右端为动力臂,左端为阻力臂,在摩擦阻力的作用下进行逃生。②上升功能:当拉动钢丝绳自由端时,杠杆动力臂与阻力臂互换,压紧轮对钢丝绳没有压紧力,具有单向自锁功能,可实现间歇安全提升。
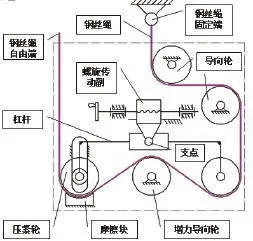
图1 新型高空救援逃生装置原理图
(2)应用场合。本装置的主要应用场合有火灾等灾难场所的高空逃生、井下救援、高空作业等。针对不同的救援需求,本装置可采用差异安装来实现不同的功能。①自救。本装置在自救逃生时,一般情况下采用直接挂钩式安装,若体重过大,可采用加装定滑轮的方式来减少装置内零件的受力保证安全。②救援。当被困人员无法进行自我逃生时,该装置可将地面人员抬升至救援现场进行救援。此时,绳子的自由端绕过定滑轮连接地面电动机,装置处于地面位置和救援人员固定,电动机将救援人员进行抬升。③多人逃生。对于高层建筑,人数较多时,可通过两个定滑轮和两个固定点,将两套救援装置进行组装,可以实现多人连续逃生。
3 理论计算
(1)运动计算。装置主要通过摩擦实现缓降逃生目的,装置中钢丝绳与摩擦瓦产生的摩擦力f=μ,当摩擦阻力与人的重力相等时,即f=mg时,加速度为零,即可实现匀速下降。转化在机构上即为:重力作用在杠杆右端合力与左端的支撑力与的关系满足以下条件:

(其中 F2=FN)。
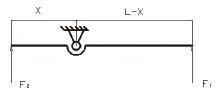
图2 杠杆原理
(2)目标函数F2的变化曲线分析。
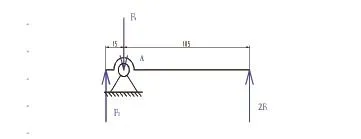
图3 杠杆受力图

图4 目标函数F2变化曲线分析
由图4可知F2与X成反比例关系。为使F2在调节过程中平缓变化选取适当的杠杆长度:L=120mm(丝杠导程为1mm)。F2由F1增加到2 F2,丝杆的调节范围不小于一个螺距,从而保证了调节过程不至于过于灵敏。
(3)绳轮设计。绳轮是整个装置中的关键结构,绳轮直径的大小决定了钢丝绳的弯折程度,进而影响绳轮在使用过程中的安全性。绳轮的设计参考了机械设计手册,钢丝绳直径为Φ4,选取安全系数s=4,推荐的绳轮直径为Φ60。
(4)轴承选取。在丝杆的支撑部位采用轴承连接,已知丝杆前端阶梯轴直径为Φ8,选取深沟球轴承619/8。安装尺寸:外径Φ19,B=6mm。机构中其余零件均经过强度校核,均在许用范围之内。
4 主要创新点
(1)原理的创新应用。通过调节杠杆动力臂和阻力臂的长短,从而调节杠杆对压紧轮的正压力,产生不同的摩擦力,实现调速的目的。因为其中摩擦因素基本是个定值(由材料本身性质而定),不论体重为多少的人,带上的缓降器都可以保持初始速度匀速下降。之所以说可调速下降,是指在保证匀速的基础上通过调节丝杆,就可以实现减速下降;或者预先调至减速档,下降时通过脚蹬墙壁,获得一定初速度,下降一定高度,实现间歇减速下降。
(2)机械结构的组合创新。本装置通过巧妙的组合设计成满足功能的产品,本设计应用的机构有:杠杆机构,螺旋传动机构,双滑块机构,摩擦制动机构。
5 加工制作及试验验证
新型高空救援逃生装置采用传统工艺方法,进行加工制作,新型高空救援逃生装置实物图如图5所示。针对不同重量(30~50kg)的物体进行实验,其下降速度均在1m/s左右。在今后还可对装置进行优化,设计改进更加稳定的摩擦系统,将装置设计成背包式,使救援更加方便。
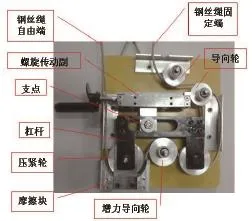
图5 新型高空救援逃生装置实物图
6 结论
高空救援是当今社会存在的难题,保证逃生者安全逃生是研究的目的,本装置结构简单、机械强度高、安全可靠,可以使人方便快捷的沿墙下滑,从而迅速逃离危险,同时还可广泛应用于高空作业、井下救援、火灾等灾难场所的高空逃生。
[1] 邱宣怀.机械设计.四版.北京:高等教育出版社,1997.
[2] 孟宪源,姜琪.机构构型与应用.北京:机械工业出版社,2005.
[3] 孙京平,魏伟.互换性与测量技术基础.北京:中国电力出版社,2009.
[4] 吴宗泽.机械设计实用手册(第二版).化学工业出版社:北京,2003.
X924.4
A
1671-0711(2016)11(上)-0152-02
