柔性生产线中五自由度工业搬运机械手控制系统研究
2016-11-22王伟
王伟
(岳阳职业技术学院机电工程系,湖南 岳阳 414000)
Research and Exploration | 研究与探索·探讨与创新
柔性生产线中五自由度工业搬运机械手控制系统研究
王伟
(岳阳职业技术学院机电工程系,湖南 岳阳 414000)
柔性生产可使多台不同功能的设备进行整合,而各设备间的工件传递需要智能的搬运设备形成整体,本文对一种基于PLC控制的五自由度搬运机械手进行硬件和软件方面的设计。
柔性生产线;五自由度;机械手
1 引言
柔性生产线是指依靠计算机管理,将多种生产模式结合,配以自动运送装置组成而的生产线。在具体的生产线实施中,可以通过多台专用机床通过调整、联结,形成柔性整体,从而达到减少生产成本的目的。
在柔性自动生产线中,各个加工设备、自动输送带设备之间都需要进行物料的传送,传统的二维机械手传送就可以实现其要求,但有时在物料传送时不是简单的二维传送,还需要改变物料的方向和位置,对于物料传送位置和方向不固定的情况,二维机械手就无法进行操作了,资金雄厚的企业一般就选用机器人,通过编制不同的控制程序来实现。但机器人价格昂贵,中小型企业无法大规模应用,限制了推广应用范围。
对于柔性自动生产线物料自动输送,更多的情况是物料传送的位置和转变的方向相对固定,这种情况下可以研发具有多维的多自由度机械手,能够满足采用物料抓取传送,价格也相对便宜,结构也简单的多,容易维护,适合大范围的推广使用。
2 机械手结构和控制过程
该搬运机械手由小臂、大臂、肩部组成,小臂依靠腕关节轴和肘关节轴实现小臂上下移动和腕关节转动,小臂俯仰角度为-90°至30°,腕关节俯仰角度为0°至25°。大臂由连接件、丝杆螺母、电机、肩关节轴和连接件组成,俯仰角度为-90度至40°。腰部电机实现大臂整件水平旋转,旋转角度为-150度至150°,肩部复合连接件组成。手爪采用气动两端夹紧形式,法兰盘旋转角度为-135°至135°。如图1所示。
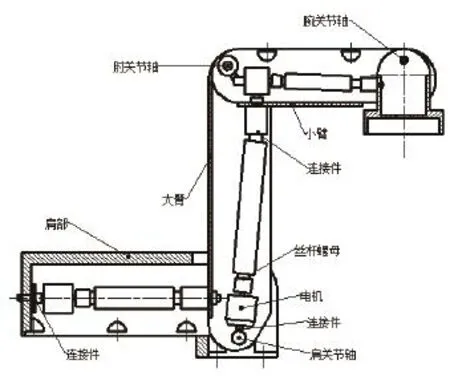
图1 气动机械手结构
搬运机械手动作顺序按照如下过程实现:
(1)按下启动键,机械手进行初始位置检测,如未停留在初始位置,检测后进行初始化设置,机械手回到初始位置;
(2)初始位置检测完成后,机械手旋转至取件工位等待取件;
(3)检测到工件后,手爪向前伸展,到限位位置后手爪下降,下降至工件上方进行定位,定位完毕后气动手爪开启,从左取件工位抓取工件,工件抓取完毕后,手爪停留1秒时间;
(4)1秒后,气动手爪上升并回退至初始位置,停留0.5秒;
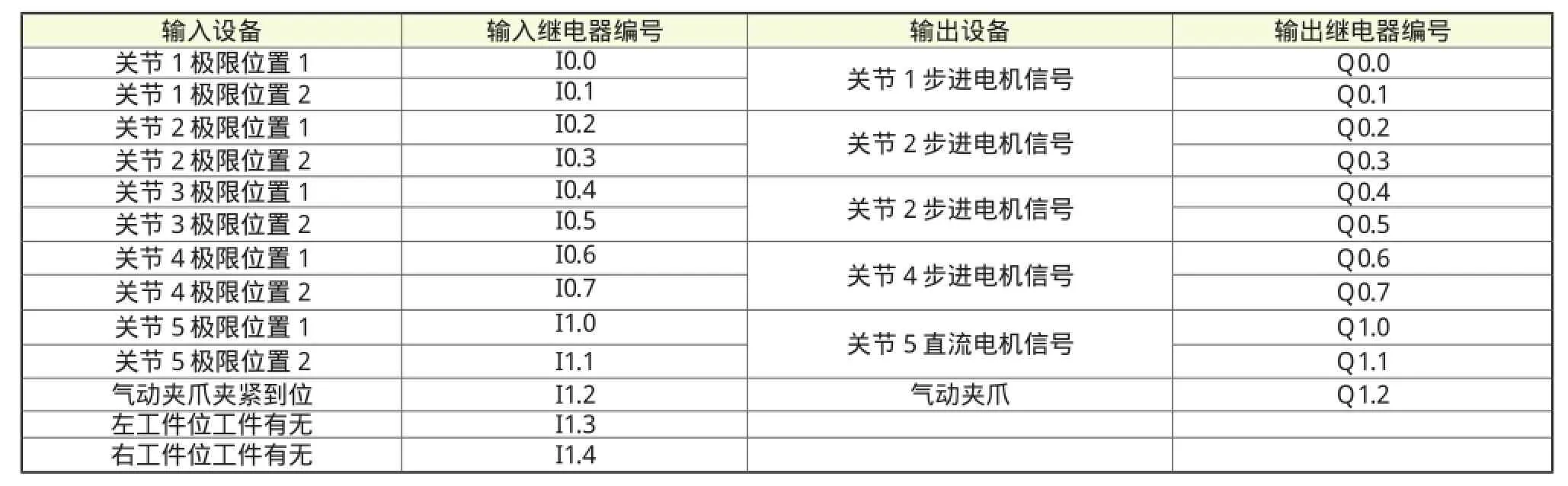
表1 气动机械手控制系统I/O分配
(5)0.5秒后,机械手旋转至放件工位,检测到放件工位位置,且放件位置为空后,手爪向前伸展并下降,停稳后气动手爪释放,在工位释放工件,释放完毕后,停留1秒时间;
(6)1秒后,机械手回转至初始位置,等待下一个工件,开始循环。
整个控制过程中,机械手的动作要求保持连贯,每个关节活动的过程中要采用精确感应的传感限位开关,到达限位位置后,传感器及时反馈信号输出,从而保证机械臂不发生卡死和碰撞的情况,后续的电气控制系统设计中也明确定义了各关节的极限位置。
3 电气控制系统设计
3.1 PLC的I/O分配
本项目的PLC选型为德国西门子S7-200系列,具有24点输入,16点输出。根据上述对搬运机械手动作的要求进行I/O分配。如表1所示。
3.2 软件设计
依据整个控制过程实施,可以采用梯形图和步进指令来进行编程实现,依据多关节机械手控制的特点,采用步进指令进行编写可以有条不紊,严格实现每一步动作。在启动时,初始位置的设定可选为取件位置,也可选择左右目标位置中点,依据步进电机和传感器进行定位。
检测到取件位置有工件后,可依据传感器定位和各关节限位数据进行精确取件,取的过程中,定时器定时主要起稳定气动手爪的作用,放件控制过程类同于取件控制过程。完成单周期动作后,要进行多次测试,最终达到循环无故障。步进程序按照定义好的I/O配置和运动过程来进行编写,注意各关节处步进电机的位置精确控制。
4 结语
现代柔性生产线中,各模块间灵活组合大幅度增强了生产线的可塑性,但模块与模块之间工件的输送任务需要机械手来承担。自由度较低的机械手可以进行简单的搬运,但复杂的工位间进行输送就需要更加灵活、更多自由度的机械手来完成。本设计中,利用五个步进电机形成五自由度控制机械手,设计简单,维护方便,可以基本实现各个复杂工位间的物料输送,在工业上有较大的实用性;同时,在学校教学中也可以作为典型的自动化控制系统案例来进行教学和实施,具有较大的推广价值。
[1]徐元昌.工业机器人.北京:中国轻工业出版社,1999.08.
[2]沈小强.一种五自由度教学搬运机械手的研制(硕士论文),苏州大学,2010.04.
[3]田忠强.一种五自由度机器人机构的研究与开发及运动学分析(硕士论文),西安理工大学,2004.3.
[4]周伯英.工业机器人设计.北京:机械工业出版社,1995.6.
[5] 郭益友.工业机械手在机械制造工艺中的发展及应用[J].淮南职业技术学院报,2002,2(01):36~38.
[6] 王永华.现代电气控制及PLC应RI技术[M].北京:北京航空航天大学出版社,2009.
[7] Durstewitz,M;Kiefner,B,Virtual collaboration environment for aircraft design [J], Information Visualisation,2002. Proceedings. Sixth International Conference onJ0-l2 July 2002,Page: 502~507.
TP242
A
1671-0711(2016)11(上)-0136-02
