某自行火炮行进间射击建模与动态响应研究
2016-11-21刘昕运马吉胜王宏凯
刘昕运,马吉胜,何 健,王宏凯
(军械工程学院 火炮工程系,河北 石家庄 050003)
某自行火炮行进间射击建模与动态响应研究
刘昕运,马吉胜,何 健,王宏凯
(军械工程学院 火炮工程系,河北 石家庄 050003)
为掌握某型轮式自行火炮行进间射击时的关键位置动态响应规律,使用Fourier逆变换法重构D级行驶路面,并利用ADAMS软件自带函数库编写发射动力学所需的复杂函数力,基于多体系统动力学和车辆地面力学,借助三维绘图软件CREO、多体动力学分析软件ADAMS、有限元软件ABAQUS建立该型装备的行走、火力、路面等部分的虚拟样机模型,通过试验验证模型的正确性,进行仿真计算并研究自行火炮2个关键位置的动态响应特征,计算结果可为研究该型装备火控系统精度、行进间射击射弹散布规律和观瞄位置干扰提供参考依据。
自行火炮;虚拟样机;行进间射击;路面不平度;驻退机;动态响应;刚柔耦合
轮式突击炮作为当今世界重要的反坦克和火力压制武器之一,有着不同于履带式车辆装备的作战模式,要求能够稳定完成高机动性下的行进间射击战术动作,并且达到射击目的。炮口振动特性是决定行进间射击精度的重要特性,也是火控系统随时调整车体姿态、稳定火炮指向的重要依据[1]。而自行火炮振动的产生主要来自行驶时的地面不平激励和开火时的射击载荷。文献[2]研究了轮式自行高炮在不同行驶工况和射击工况下行进间射击时的炮口响应特性,引入滚珠座圈碰撞模型和有限元柔性身管模型,得到了不同行驶速度、等级路面、射角的振动规律。文献[3]综述了目前主流的炮口线位移、线速度、线加速度、角速度的试验测试方法,并阐述了各方法的优缺点。文献[4]基于动力学分析软件RecurDyn建立了遥控武器站的虚拟样机模型,分析了不同路面模型和不同行驶速度下连续射击的炮口线位移振动特性,为武器操作者提供参考依据。文献[5]使用ADAMS/ATV建立了某型履带式自行火炮行进间射击的动力学模型,使用FORTRAN语言编写发射动力学所需复杂函数力,地面文件数据用谐波叠加法重构,通过数值计算不同路面等级和不同行驶速度得到提高火炮射击综合效能的规律。
对于轮式自行突击火炮,还没有研究分析除炮口位置以外的其他关键位置如观瞄设备位置振动特性的相关文献。对于驻退机力,动力学仿真相关文献均是使用编程语言调用用户子程序实现,方法复杂且耗时费力。笔者以某轮式自行突击火炮为研究对象,建立全车虚拟样机模型,利用Fourier逆变换法重构等级路面。加载炮膛合力、复进机力、驻退机力、摩擦力时,采用ADAMS自带函数库函数以及拟合样条曲线,完全代替以往复杂繁琐的FORTRAN语言编程调用的方法。研究了自行火炮在D级路面上行进间射击的炮口位置的角位移和角速度以及观瞄位置的多向振动特性,为该型装备的火控系统和射击精度研究以及观瞄位置人机工程质量评价提供参考依据。
1 虚拟样机模型建立
1.1 自行火炮模型拓扑结构
该型轮式突击火炮虚拟样机模型主要由行走部分模型、火力部分模型和地面不平度模型构成,其中行走部分与火力部分之间的作用力可以等效为一个线弹簧力,该弹簧的刚度阻尼称为方向机刚度阻尼,是用Y Cai理论近似计算齿轮间接触刚度和阻尼所得的等效值[6]。行走部分和地面之间用ADAMS/tire轮胎模块创建轮胎特殊力。经过简化全炮由27个刚体、1个柔性体和6个轮胎组成多体系统,全系统共有39个运动自由度,模型的拓扑结构如图1所示。描述各部件间的关系时,hr、ht、hf、hc、ho分别表示转动副、移动副、固定副、接触和其他连接关系。

1.2 行走部分仿真模型
将自行火炮行走部分简化为由车体、独立悬架和车轮组成,其中车体模型是由CREO软件绘图后导入,设置质量、转动惯量并修改质心位置至正确位置的方法建立。车辆悬架各轮均采用结构完全相同的不等长双横臂独立悬架系统,该悬架系统主要由A字形下横臂、单上横臂、转向节、减震阻尼器、减震弹簧组成。其中上下横臂与转向节之间用球副连接,与车体间用转动副连接。
轮胎采用UA模型轮胎[7],修改轮胎半径、宽度、垂向阻尼、垂向刚度等轮胎文件数据。由于自行火炮为六轮全驱,故为六轮均加载旋转点驱动,用STEP函数实现从零平缓加载驱动。
1.3 火力部分动力学模型
用同于车体模型建立的方法建立火力部分各部件模型。摇架底面和炮尾部分建立接触,并修改接触参数以模拟相互撞击时的缓冲结构。对高低机建模,使用作用在耳轴处的扭簧代替,高低机刚度和阻尼用Y Cai理论等效求解接触刚度并和碟形弹簧刚度串联而成[8]。
碟簧刚度kg等效成扭簧刚度kz的关系式为
kz=(r1r3/r2)2kg
(1)式中,r1、r2、r3分别为蜗杆、主轴齿轮和齿弧的分度圆半径。
碟簧阻尼cg等效成扭簧阻尼cz的关系式为
cz=(r1r3/r2)2cg
(2)
总高低机刚度k与碟簧刚度kg和齿轮接触刚度kc满足表达式
(3)
火力部分炮膛合力使用软件自带函数库中的Akima拟合方式得插值的方法,加载关于时间函数的单向作用力。复进机力可用IF和VX函数简单编写含有复进机摩擦力的复进机力。由于驻退机力较为复杂,后坐和复进过程液压阻力差别很大,且液压阻力有流液孔面积ax和速度v两个变量,所以以往的射击动力学模型一般用FORTRAN语言编写液压阻力并连接用户子程序来表达驻退机力。笔者直接使用ADAMS函数表达驻退机力,能够完全达到相同的力学载荷,使模型更加简洁且易于建立。
后坐过程驻退机液压阻力方程为
(4)
式中:A0为活塞工作面积;AP为节制环孔面积; Afj为驻退杆内腔直径面积(复进节制器工作面积); Ω为支流最小截面积; ax为流液孔面积;K1和K2分别为主流和支流液压阻力系数;γ为液体重度;v为后坐速度。
为在ADAMS函数编辑器中实现这个函数力,由节制杆直径与后坐位移关系的离散数据创建2D数据样条曲线,用AKISPL函数实现任意位置点的插值,VX函数确定后坐速度。函数编辑格式如下:(a1/((a2**2-AKISPL(DX(MARKER1,MARKER2,MARKER2),0,SPLINE,0)**2)/4*pi)**2+a3)*VX(MARKER2,MARKER2,MARKER2,MARKER2),式中,a1、a2、a3为由已知参数算出的常数项。
复进过程液压阻力还包含有复进节制器液压阻力,函数编辑方法同理。
1.4 柔性身管模型
为了得到更加准确的动态响应结果,将身管模型简化为柔体。使用有限元软件ABAQUS对身管进行模态分析,得到的中性(MNF)文件导入ADAMS,通过耦合节点与炮口制退器、摇架、炮尾连接。图2为低阶典型振型。
1.5 路面不平度模型
随机不平路面激励是影响关键位置振动信号的主要因素之一,路面随机信号只能用各种统计特征量来表征它,可用功率谱密度来表征它的统计功率谱特征,拟合为[9]
(5)
式中:n2、n1分别为有效频带的上下限;n为空间频率,表示每单位长度变化次数;Gq(n0)为参考空间频率n0下的功率谱值,数值取决于路面的等级。
笔者使用Fourier逆变换法对路面不平度进行重构。该方法是由已知路面功率谱得到对应的一系列离散Fourier变化的模值,再用正态分布随机序列经Fourier变化后取相位信息作为相角输入,构造出新的频域信号,再进行Fourier逆变换就得到所求路面不平度的随机序列。该方法理论严密,所求路面信号与标准路面谱拟合程度最好。
由功率谱密度和幅度谱的关系可反解得到:
(6)
式中:xk为路面不平度随机序列;Xk为xk的Fourier变化;Δl为距离采样间隔;N为采样点数。
取均值为0,标准差为1的正态分布序列f(t)进行Fourier 变换得到其频谱函数F(ωk)复数形式如下:
F(ωk)=|F(ωk)|ejφ(ωk)
(7)
取上式相位谱密度φ(ωk)与|Xk|构造新Xk序列频域信号:
Xk=|Xk|eφ(ωk)
(8)最后对Xk进行Fourier逆变换即得到路面不平度xk。
用上述方法重构我国道路分级标准中的D级路面,并建立长120 m,宽8 m,起始10 m无路面激励的轮式突击炮行驶路面。路面不平度随路面长度变化如图3所示。
最终建立了如图4所示的完整刚柔耦合自行火炮虚拟样机模型。
2 仿真计算与结果分析
2.1 模型验证
虚拟样机建立是否准确需要进行模型验证。将该自行火炮模型置于开始段无路面信号的水平刚性地面上,各轮均处于制动状态,身管处于高低角0°、方位角0°。对模型进行静平衡分析,从静平衡处开始仿真,5 s后加载炮膛合力,模拟火炮在静止状态下的射击过程。提取火炮后坐时间、复进时间、最大后坐速度、最大后坐位移数据与距炮口点2 m的安装位移传感器的测点位置的高低线位移、角位移数据,分别与对应的试验数据进行对比如表1所示。
表1 静止状态射击计算值与试验数据平均值对比
从对比结果可以看出,建立的模型计算数据与实际试验数据基本吻合,其误差均在工程允许的范围以内。表明此模型具有一定的准确性与合理性,模型验证表明最后的仿真计算结果有一定的可信性。
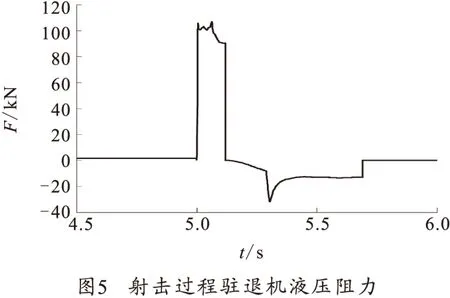
计算所得驻退机力如图5所示。可以看到在复进过程中液压阻力有一个陡升点,这是由于驻退机中的一个腔中的真空部分消失,驻退液开始从该腔经流液孔流入另一腔产生液压阻力而引起的,在这之前的液压阻力仅由驻退机复进节制器提供,曲线符合液压阻力变化规律。
2.2 仿真结果与分析
自行火炮动力学模型以15 km/h的速度匀速前进,模型在启动后2 s内处于线性加速过程,期间加速惯性力会导致炮口干扰,且由于行驶最初时的无激励路面的存在,模型3 s后才能完全驶入等级路面。为准确测量炮口动态响应,要求全车在等级路面上稳定匀速行驶一段时间后开始射击,故设定行驶5 s后加载炮膛合力模拟行进间射击过程。为能够充分观察火炮射击对射击后继续行驶时振动的影响情况,以及研究射击后一段时间观瞄位置的振动干扰,在射击过后继续行驶仿真10 s。分别研究炮口处和观瞄装置处的MARKER点的动态响应。衡量炮口动态特性主要取线位移速度量和角位移速度量[3]。观瞄位置振动特性一般需取六向位移和速度动态参数。
图6和图7为行进间射击炮口高低角位移和角速度变化曲线。
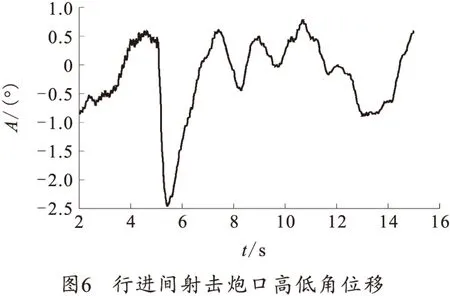
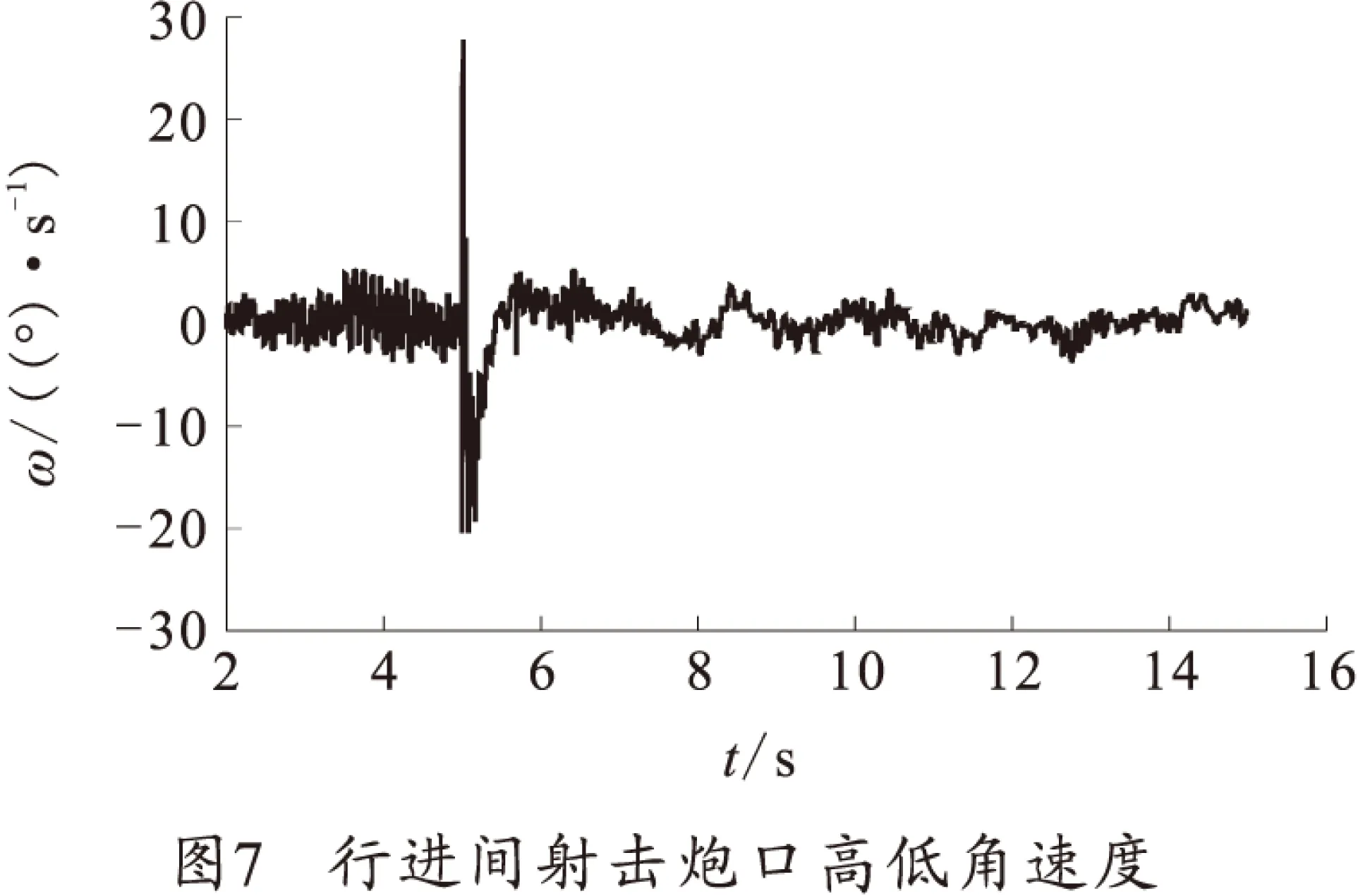
行驶过程中炮口高低角位移最高0.774°,射击把炮口最高角位移增加到2.463°。炮口最高角速度从5.238 (°)/s跃升至27.742 (°)/s,增大到5倍以上。这是由于在5 s时刻加载炮膛合力,合力作用于膛底,加上反后坐装置和摇架的作用反力,炮口产生一个瞬间较大的绕耳轴向上转动的趋势。火炮射击造成的炮口动态响应相比路面激励的影响更加突出和明显。炮弹出炮口时的位移和速度振动幅值对炮弹出炮口的飞行弹道规律研究十分重要。
图8为计算所得的行进间射击观瞄位置线速度,可以看到,虽然光学观瞄位置和夜视观瞄位置的安装距离很近,但是在火炮射击时刻的竖向线速度峰值存在19.471 mm/s的差值,这是由于两位置的竖向和纵向的坐标不同,火炮射击时车辆存在俯仰翻转的趋势,导致速度不同。故研究观瞄位置时,应当分别考虑各处的振动响应。
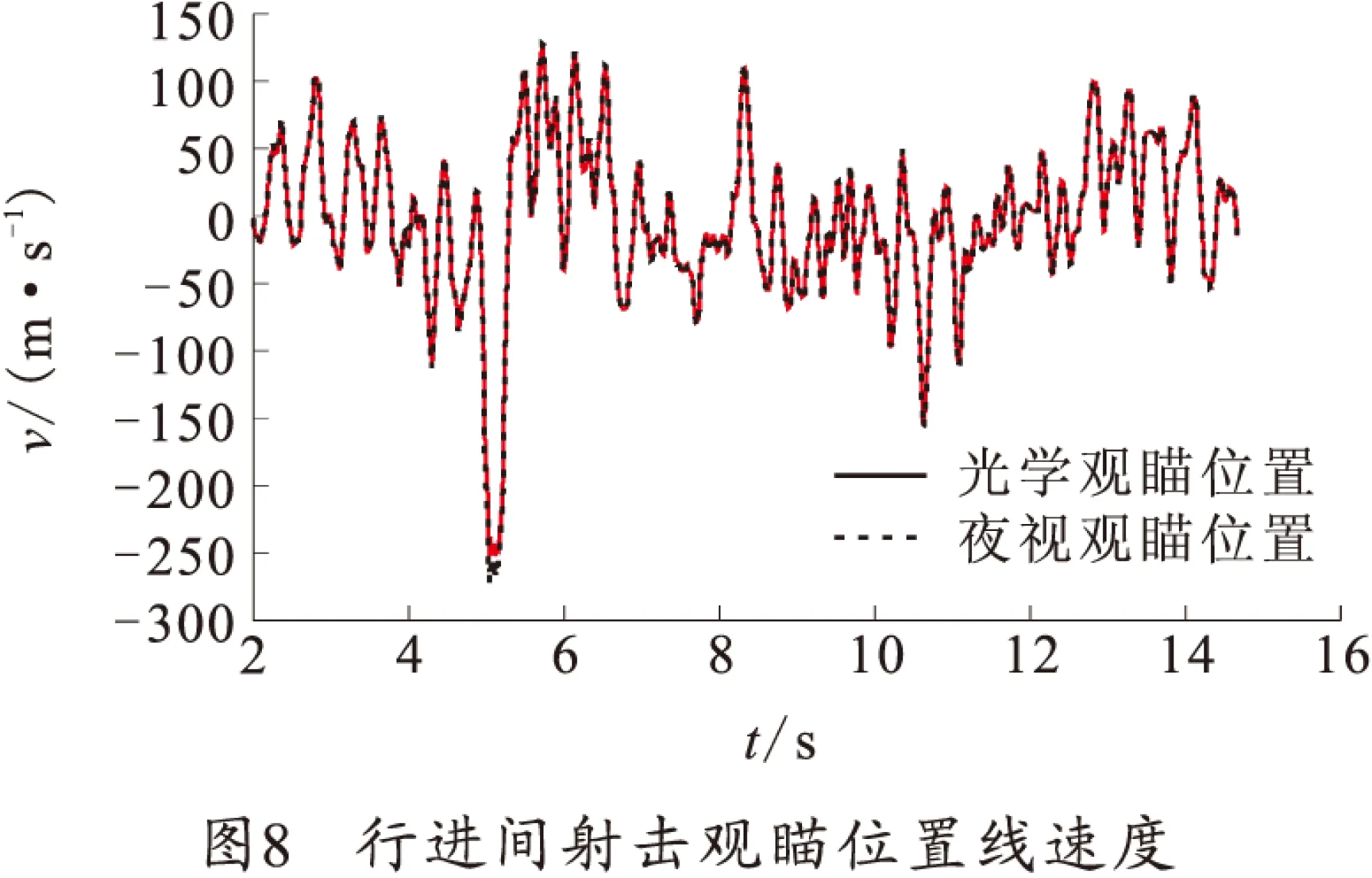
图9和图10为行进间射击观瞄位置角速度和角加速度。
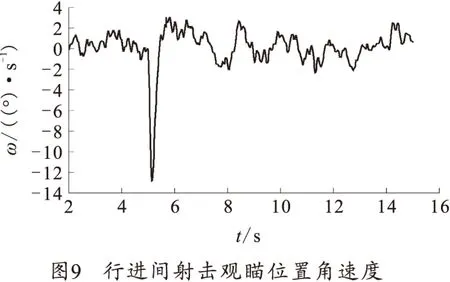
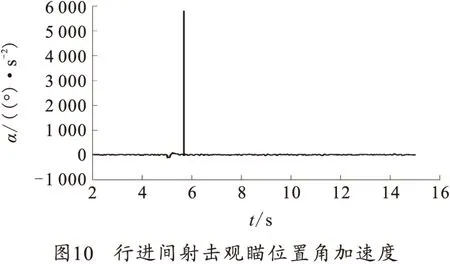
计算结果表明,随着自行火炮向前匀速行驶,观瞄位置由于地面激励产生振动,射击载荷瞬间加大了该位置的振动幅度,高低振动角速度在射击时达到了最大12.800 (°)/s。但是由射击造成的振动持续时间在2 s以内,观瞄位置的稳定时间对二次射击的射击精度具有重要的参考价值,振动特性对该位置的干扰情况也有一定参考作用。
3 结束语
应用多体系统动力学和火炮发射动力学知识,考虑到高低方向机等效刚度弹簧,重构随机不平路面,采用创新的驻退机力加载方法,应用刚柔耦合技术手段,建立轮式自行突击火炮行进间射击虚拟样机。通过仿真计算得到炮口和观瞄位置的动态响应,为射击精度分析和人机工程质量评价提供参考依据。
References)
[1]冯长根,温波,李才葆. 自行火炮行进间射击动力学研究[J]. 兵工学报,2002,23(4):457-461.
FENG Changgen, WEN Bo, LI Caibao. Dynamic analysis of a self-propelled gun firing on the move[J]. Acta Armamentarii, 2002,23(4):457-461.(in Chinese)
[2]谢润,杨国来. 自行高炮行进间射击炮口响应特性研究[J]. 兵工学报,2014,35(8):1158-1163.
XIE Run, YANG Guolai. Research on response characte-ristics of muzzle for self-propelled antiaircraft gun firing on the move[J]. Acta Armamentarii, 2014,35(8):1158-1163.(in Chinese)
[3]王宝元,邵小军. 炮口振动响应实验测试方法综述[J]. 火炮发射与控制学报,2010(3):112-116.
WANG Baoyuan, SHAO Xiaojun. Summarization of the measurement method for muzzle vibration responses[J]. Journal of Gun Launch & Control, 2010(3):112-116. (in Chinese)
[4]戴东明,毛保全,徐礼,等. 某遥控武器站行进间射击炮口振动特性研究[J]. 火炮发射与控制学报,2012(2):38-41.
DAI Dongming, MAO Baoquan, XU Li, et al. Muzzle vibration characteristics of a remote control weapon station shooting on the move[J]. Journal of Gun Launch & Control, 2012(2):38-41. (in Chinese)[5]谢润,杨国来,徐龙辉. 自行火炮行进间射击的炮口振动建模与分析[J]. 火炮发射与控制学报,2012(2):29- 32.
XIE Run, YANG Guolai, XU Longhui. Modeling and analysis of muzzle vibration for self-propelled gun firing on the move[J].Journal of Gun Launch & Control, 2012(2):29-32. (in Chinese)
[6]邓辉咏. 自行火炮非线性发射动力学仿真及参数匹配研究[D]. 石家庄:军械工程学院,2011.
DENG Huiyong. Simulation research on nonlinear firing dynamics of self-propelled gun and its parameters matching[D].Shijiazhuang:Ordnance Engineering College,2011. (in Chinese)
[7]李军,邢俊文,覃文洁. ADAMS实例教程[M].北京:北京理工大学出版社,2002:60-80.
LI Jun, XING Junwen, QIN Wenjie. ADAMS instance tutorial[M]. Beijing: Beijing Institute of Technology Press, 2002:60-80. (in Chinese)
[8]曾晋春,杨国来,王晓锋. 计及齿轮-齿弧接触的火炮动力学分析[J]. 弹道学报,2008,20(2):81-84.
ZENG Jinchun, YANG Guolai, WANG Xiaofeng. Dyna-mics analysis for gun with consideration of contact between arc and gear[J]. Journal of Ballistics, 2008,20(2):81- 84. (in Chinese)
[9]张亚欧,马吉胜,吴大林,等. 基于Fourier逆变换法的路面不平度模拟[J]. 河北工业大学学报,2005,34(5):66-69.
ZHANG Ya’ou, MA Jisheng, WU Dalin, et al. Modeling and simulation of road roughness based on the method of reverse Fourier[J]. Journal of Heibei University of Technology, 2005,34(5):66-69. (in Chinese)
Modeling and Dynamic Response of a Self-propelled Gun Firing on the Move
LIU Xinyun, MA Jisheng, HE Jian, WANG Hongkai
(Artillery Department, Ordnance Engineering College, Shijiazhuang 050003, Hebei, China)
For the purpose of mastering crucial position dynamic response law of a certain type of wheeled self-propelled gun firing on the move, D road is reconstructed based on Fourier inverse transformation method and the complex function force of launch dynamics is written by using the function library of ADAMS software. The virtual prototype model of the type of equipment is built in terms of the moving, firing, and road surface based on multi-body system dynamics and vehicle terramechanics, with the aid of the 3D drawing software CREO and multi-body dynamics analysis software ADAMS and finite element software ABAQUS. With the model’s correctness verified through experiments, the simulation calculation and research are to be conducted of self-propelled gun dynamic response characteristics of two crucial positions. The results provide a reference for the study of the fire control system of this type of equipment, projectiles scattered law firing on the move and the sighting position interfe-rence.
self-propelled gun; virtual prototype; firing on the move; road roughness; recoil mechanism; dynamic response; rigid-flexible coupling
10.19323/j.issn.1673-6524.2016.03.002
2015-12-24
刘昕运(1992—),男,硕士研究生,主要从事武器系统仿真与虚拟样机技术研究。E-mail:251815902@qq.com
TJ818,TJ301
A
1673-6524(2016)03-0006-05
