机器视觉在我国农业中的应用研究进展分析
2016-11-19王风云郑纪业唐研刘延忠李乔宇穆元杰王磊
王风云 郑纪业 唐研 刘延忠 李乔宇 穆元杰 王磊


摘要:随着图像处理、模式识别、人工智能等技术的不断发展,机器视觉技术在我国农业上的研究逐步深入,并取得了许多重要成果。本文基于中国知网全文数据库检索系统,对我国基于机器视觉的农业研究进行了博、硕士学位论文与期刊论文的统计、分析。结果显示,我国农业机器视觉研究主要涉及检测、图像处理、轨迹跟踪与车辆导航、模式识别及其应用等主题,主要集中在图像信息获取方法、图像处理与识别算法、智能导航算法以及系统集成应用等方面,以《农机化研究》、《农业工程学报》和《农业机械学报》为主要发表刊物,主要受国家自然科学基金、国家高技术研究发展计划(“863”计划)、国家科技支撑计划、省科技攻关计划、省自然科学基金等项目支持,国内研究机构以中国农业大学、南京农业大学、浙江大学、华南农业大学、山西农业大学和江苏大学为主。但目前我国基于机器视觉的农业研究在作物生长信息检测、杂草识别、变量控制、机械智能导航、采摘与分选等方面离实用化、商品化仍有一定的距离,集成符合我国农业发展实际的机器视觉技术系统将是今后重要的研究方向。本研究为机器视觉在我国农业上的进一步应用研究提供了参考。
关键词:机器视觉;农业;图像处理;模式识别;视觉导航
中图分类号:S126 文献标识号:A 文章编号:1001-4942(2016)04-0139-06
机器视觉的概念起始于20世纪60年代,最先应用于机器人的研制,即通过视觉系统采集图像并进行处理,然后估算出目标的位置,从而控制机器运动。1979年提出的视觉伺服(Visual Ser-vo)概念,则可以将视觉信息用于连续反馈,以提高视觉定位或追踪的精度。
国内有关机器视觉的应用研究起步于20世纪80年代,主要应用于半导体和电子行业,如PCB印刷、电路组装、元器件制造及半导体设备集成等。农业机器视觉的研究,早期主要以探讨农业机器人的技术、经济可行性、潜力与前景等宏观研究为主,后来逐步扩展到图像数据的采集、分析与处理、轨迹跟踪与车辆导航、智能识别等关键技术的研究与应用上。为了解我国农业机器视觉研究的进展情况,本文基于中国知网全文数据库检索系统,通过检索机器视觉在我国农业上集成应用和研究的相关文献,并对其数据进行统计,分析了该领域的研究进展及出现的问题,以期为机器视觉技术在我国农业中的深入研究与应用提供参考。
1 数据来源
本研究基于中国知网的全文数据库,以“机器视觉”与“农业”为检索词,分别在博、硕士学位论文库和中国期刊全文数据库中进行主题路径逻辑“与”的检索,时间截止到2015年9月24日,并对检出文献的研究主题、基金来源、作者机构及其在不同学术期刊上的分布进行分析。然后据此分析结果对机器视觉在农业上的应用研究进展进行简要介绍和综述,指出目前应用中存在的一些问题。
采用Microsoft Excel 2007进行数据处理与作图。
2 结果与分析
2.1 博、硕士学位论文检索结果
检索结果显示,从2000年开始,共检索到农业机器视觉研究的博、硕士学位论文235篇,其中博士论文38篇,硕士论文197篇(见表1)。
2.1.1 博、硕士学位论文作者的机构分布 从表1可以看出,博士论文以南京农业大学的最多,共9篇,主要研究黄瓜和棉花收获机器人系统,基于机器视觉的作物对行喷药控制、杂草和稻飞虱识别技术,基于图像特征的田间籽棉成熟度与品级判别技术,机器视觉导航系统及光照问题等。其次是中国农业大学,共7篇,多为近几年的文献,如:2013年王建仑以果园田问叶片为研究对象,进行田间叶片图像分割与单幅三维重建的算法研究,并利用机器视觉系统解决了远程获取农业生产现场叶片农学性状参数的问题;2014年李寒、张春龙、张东波、杨振宇和黄小龙五位博士基于机器视觉分别进行了目标检测、信息获取与视觉伺服策略、伺服控制、机器人末端执行器优化设计等研究;2015年马锃宏进行了田问作物对靶喷施机器关键技术的研究。浙江大学的相关研究论文也较多,有6篇,涉及稻种质量无损检测、田间路径识别算法与车辆自动导航方法、基于光谱和多光谱的杂草识别、水稻氮磷钾营养识别和诊断等研究。
硕士论文以江苏大学最多,共19篇,以基于机器视觉的杂草图像分割、特征提取、识别和定位等研究为主;南京农业大学次之,共17篇;华中农业大学、西北农林科技大学和浙江大学共28篇。197篇硕士论文中涉及的关键词频度,机器视觉94次,图像处理44次,特征提取15次,图像分割15次,杂草识别11次,颜色特征9次,视觉导航9次,模式识别9次,DSP 9次,说明农业应用机器视觉的研究主要以图像处理、特征提取、图像分割、杂草识别、颜色特征、视觉导航、模式识别和DSP为主。
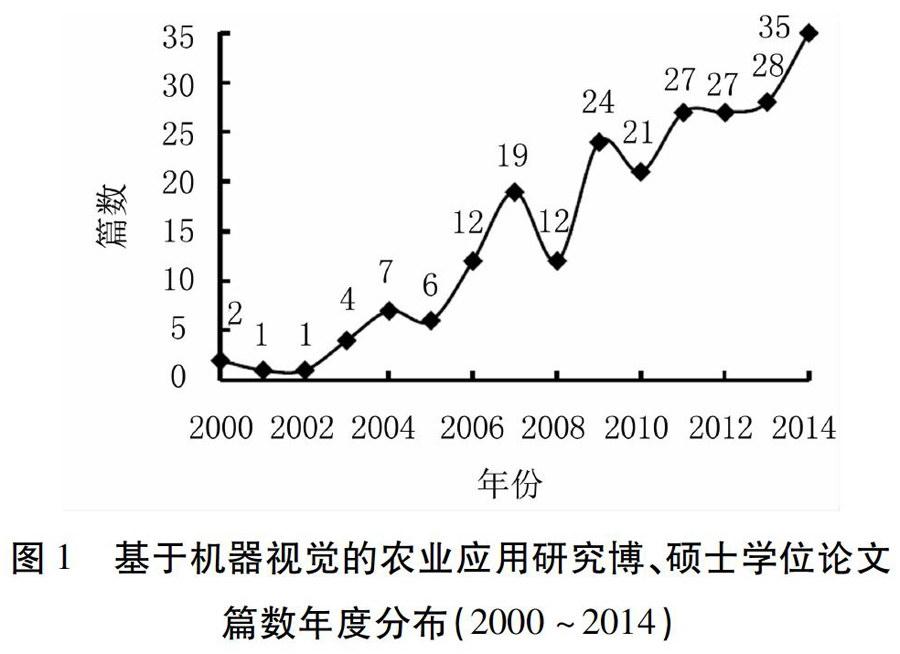
2.1.2 博、硕士学位论文数量的年度分布 由图1可以看出,2000~2002年,基于机器视觉的农业研究学位论文数量为1~2篇,说明当时国内从事相关研究的学者还很少;之后,该研究领域越来越受到学者们的关注,博硕论文数量大幅增加,虽年际问有波动,但整体呈上升趋势,至2014年有关农业机器视觉研究的论文已达到35篇。
2.2 期刊论文检索结果
2.2.1 论文数量年度分布 由表2可以看出,中国知网期刊全文数据库1999~2015年间共收录了基于机器视觉的农业研究论文179篇。论文数量年度分布没有明显的规律可循,其中,1999~2003年数量较少,说明国内这方面的研究刚刚起步;2004~2015年论文数量在7~27篇之间波动,以2011年数量最多,说明该研究领域受到了研究人员的持续关注。
2.2.2 研究主题分布 由统计结果可以看出,农业机器视觉研究主要涉及检测、图像处理、轨迹跟踪与车辆导航、模式识别及其应用等方面。机器视觉检测包括机器人运动障碍目标检测、长势无损检测以及果蔬品质检测等。图像处理主要包括图像采集、分析与处理。轨迹跟踪与车辆导航主要研究环境感知、路径规划、车辆模型与控制等。机器视觉的模式识别主要有路径识别、作物品种识别、成熟果蔬识别、病虫害识别以及杂草识别等。机器视觉主要应用于农产品的分级分选、病虫草害控制、自动采摘、长势监测以及机械定位与导航中。机器视觉的研究离不开算法研究,包括检测算法、图像处理算法、轨迹跟踪算法、导航算法以及识别算法等。
2.2.3 期刊分布 根据中国知网数据,179篇期刊论文共发表在了18种核心期刊上,包含4种EI检索期刊,其中《农机化研究》36篇,最多,《农业工程学报》28篇,《农业机械学报》17篇,三者的论文数量占45.25%。另有15篇发表在高校和农业科研院所出版的期刊上,比较多的是《安徽农业科学》,有6篇。其它论文主要发表在与计算机软件及计算机应用、农业工程、自动化技术、农业基础科学、植物保护、农艺学、园艺、农作物等相关的期刊上。可见,机器视觉在农业上的某些研究仍比较前沿,受到《农机化研究》、《农业工程学报》和《农业机械学报》等核心期刊和EI检索期刊的欢迎。
2.2.4 基金来源 资金支持是科学研究的基础,统计结果显示,检索到的文献中得到项目资助的有78篇,占43.57%,受国家自然科学基金支持的论文有23篇,受国家高技术研究发展计划(“863”计划)支持的21篇,受国家科技支撑计划支持的4篇,三者占检索到的期刊论文总数的26.82%;受各省科技攻关计划支持的研究论文7篇,受各省自然科学基金项目支持的6篇,受高校或教育部门支持的9篇。由此可见,国家和各省、部委都高度重视机器视觉在农业中的研究与应用。
2.2.5 作者机构分布 对179篇期刊论文作者(限第一作者)的单位进行统计,结果显示,来自高校院系的作者136位,占75.98%;来自研究院所的作者14位,占7.82%;来自其它机构的有29位,占16.20%。中国农业大学、南京农业大学、浙江大学、华南农业大学、山西农业大学和江苏大学位居论文作者所在机构的前六位,其中来自中国农业大学的论文作者最多,有22位,占检索期刊论文总数的12.29%。表明,中国农业大学、南京农业大学、浙江大学等是目前国内农业机器视觉研究实力比较雄厚的高校。
3 机器视觉在农业上的应用研究进展
通过对文献资料的分析、研究可以发现,我国基于机器视觉的农业应用研究主要集中在图像信息获取方法、图像处理与识别算法、智能导航算法以及系统集成应用方面。
3.1 图像信息获取方法研究
精确获取图像信息是机器视觉的基础,直接影响到机器视觉判断的精度,且图像采集的速度影响着机器视觉执行的速度。由于农业应用环境差异大,机器视觉获取图像信息的方法需根据应用对象与目的的不同而变化,目前多是采用相机或摄像机结合近红外光谱或高光谱信息进行图像信息的采集与分析处理。
上海交通大学翟鹏针对葡萄自身的特点和现场条件,设计了由全光谱的自然光源、反光伞、CCD相机、定时拍摄触发控制器、漫射挡光背景板和球坐标脚架组成的图像采集系统,对葡萄果实和根系的表型特征进行了采集与分析。华中农业大学肖武建立了基于近红外光谱和机器视觉技术快速检测土壤含水率的方法,同时对湖北地区黄棕壤、潮土和稻田土样品的光谱进行了主成分分析,结果表明能很好地将土壤含水率分级。沈阳理工大学刘哲基于双目立体视觉系统,对苹果幼果的图像进行了立体重建,且能够对苹果幼果进行正确的匹配并标号,实现了对苹果果实的三维定位。
3.2 图像处理与识别算法研究
机器视觉在农业应用的自然场景中,光照条件的变化以及农作物个体颜色、形状、位置、姿态、遮挡和重叠程度等都给机器视觉识别、特征提取带来很大的困难,能否快速、准确地识别出目标直接影响机器视觉系统的实时性和可靠性,因此,图像处理与识别算法研究成为机器视觉在农业中应用的关键环节。
华南农业大学张志斌等提出的基于加速鲁棒特征(Speeded up robust features,SURF)的绿色作物特征提取与图像匹配算法,首先在RGB空间进行图像分割,并采用开运算对分割图像进行滤波处理,然后采用SURF旋转不变性原理进行左、右绿色作物图像特征提取,最后采用最近距离比次近距离法匹配特征点,该方法为提高田问条件下的3D视觉导航参数精度、准确获取基于无线传感器网络的作物生长参数提供了参考。吕强等采用图像G-B色差分量、最大类问方差法自适应阈值分割、基于距离变换的分水岭分割、凸包算法、基于Tukey权重函数的最小二乘圆拟合法识别自然场景下的柑橘果实。在果实或病害识别上,支持向量机识别的正确率高于只用颜色、纹理或形状特征进行识别的正确率,识别性能也优于神经网络方法。
3.3 视觉定位导航算法研究
基于机器视觉的导航系统能自动采集农田环境图像,通过分析识别出导航路径,最终计算出系统导航参数以控制机械沿导航路径行走。定位导航算法是机器视觉导航的核心,决定着导航定位的准确性以及控制的鲁棒性。
华南农业大学张志斌等提出了基于Hough变换和Fisher准则的垄线识别算法,使得作物垄线定位的准确性、适应性均得到提高,而且能够避免较大面积杂草等的影响。上海交通大学周俊等人基于卡尔曼滤波的思想,融合各传感器的观测值,提出了一种预测跟踪控制算法,避免了以视觉系统为主的计算耗时导致状态反馈滞后而产生的不利影响,改善了导航控制的鲁棒性和精度。南京农业大学安秋等人针对农业机器人视觉导航中存在的阴影干扰问题,提出了基于光照无关图的算法,能够去除导航图像中的阴影,然后利用增强的最大类问方差算法分割和优化图像的Hough变换提取作物行中心线,最终通过坐标转换获得导航参数,此算法不仅满足了导航实时性的要求,而且使农业机器人在光照变化的情况下导航参数提取的鲁棒性有了更大的提高。
3.4 机器视觉在农业中的系统集成
机器视觉在农业中的应用,集成了光学、电气、机械以及计算机等技术。李志臣利用机器视觉集成了杂草对准喷药系统,整个系统搭载在一辆拖拉机上,由运动执行单元来驱动,视觉部分由摄像头和千兆网卡组成,完成图像采集、杂草识别和信息发送功能;控制部分由计算机和可编程控制器(PLC)组成,接收并解释信息和发送控制电压;执行部分由药箱、泵、电磁阀、溢流阀、喷嘴和一些管路组成,输送药液和进行喷药。郭海针等人在一台轮式拖拉机上装载计算机、CCD摄像机和电液控制系统,集成了基于机器视觉的农业机械无人驾驶系统,利用计算机图像处理和识别技术,采用模糊控制策略,实现了农业车辆的视觉伺服。李谦结合除草机器人苗草识别的试验,讨论了机器视觉在除草机器人中的应用,并集成了基于机器视觉的苗草识别系统,包括工控计算机、摄像头、光源和可升降仿形装置等,试验识别率达到了95%以上。
3.5 目前农业机器视觉研究中存在的问题
虽然我国基于机器视觉的农业研究已取得了一定的成果,但由于农业研究对象的多样性和复杂性以及机器视觉技术的特点,目前仍存在着许多问题。
(1)机器视觉测量的可靠性仍有待提高。由于机器视觉处理的主要是图像或视频信息,测量条件、环境、被测物表面特性等的改变,有时甚至轻微改变,就会大大影响处理的结果,这是目前机器视觉在农业上应用比较突出的问题,只能针对具体问题研究相应光照、特征提取、匹配、重建、标定等具体方法。
(2)视觉测量的环境适应性差,而且农业研究对象复杂多样,目前还无法找到一种具有普适性的方法,因此针对不同研究对象的图像处理算法、导航算法、识别算法等仍是目前农业机器视觉研究的核心,而且今后的研究对算法的鲁棒性和实时性提出了较高的要求,这也是机器视觉技术在农业实际应用中的难点所在。
(3)系统集成应用是机器视觉研究的最终目的,但由于视觉系统、智能机械及电气控制集成成本和科技含量高,导致集成机器视觉的成套智能控制系统对农业应用来说成为高大上的设备,与目前农业分散经营的模式和农民总体认识水平还有一定的距离,这是某些关键技术仍处于研究试验阶段的一个重要原因。
3.6 农业机器视觉研究的发展趋势
目前我国的农业机器视觉技术在作物生长信息检测、杂草识别、变量控制、机械智能导航、采摘与分选等方面的研究已有很大进步,但离实用化、商品化应用仍有一定距离,符合我国农业发展实际的机器视觉技术系统集成将是一个重要的研究趋势。
另外,随着计算机图像处理技术的日新月异、传感器及其它相关硬件性能的日趋提高,利用视觉技术检测农田信息实现自动导航将成为未来农业机械无人驾驶的重要发展方向。
4 结论
本研究通过对中国知网博、硕士学位论文数据库和全文期刊数据库的检索分析发现,我国基于机器视觉的农业研究比较活跃,主要集中在图像的采集、分析与处理、轨迹跟踪与车辆导航、模式识别、品质检测等方面,但由于农业研究对象的复杂性,仍存在着许多问题。如何进一步提升机器视觉检测的可靠性,提高算法的鲁棒性和实时性,仍将是今后一段时间的研究热点。由于在某些方面,如播种、喷药、除草、农产品后期加工等农业生产过程中,应用机器视觉技术可以部分代替人工,不仅能避免不良环境对人体造成的危害,减轻劳动强度,而且能大大提高生产效率,因此,集成机器视觉的智能控制系统将是未来农业智能化、精准化发展的趋势之一。
