无人机PHM系统体系结构设计研究
2016-11-17崔嘉,贺静,刘奇,白杰,程橙
崔 嘉,贺 静,刘 奇,白 杰,程 橙
(1.海军航空工程学院, 山东 烟台 264001; 2.北京机电工程研究所,北京 100074; 3.海军装备部,北京 100841; 4.中国航天科工集团三院 无人机技术研究所,北京 100074; 5.北京航天测控技术有限公司,北京 100041)
无人机PHM系统体系结构设计研究
崔 嘉1,贺 静2,刘 奇3,白 杰4,程 橙5
(1.海军航空工程学院, 山东 烟台 264001; 2.北京机电工程研究所,北京 100074; 3.海军装备部,北京 100841; 4.中国航天科工集团三院 无人机技术研究所,北京 100074; 5.北京航天测控技术有限公司,北京 100041)
针对状态预测与健康管理(PHM)技术在无人机领域的应用需求,文章参考国内外PHM技术研究成果和应用经验,结合我国无人机保障现状,分析了无人机PHM系统的功能需求,研究设计了无人机PHM系统的体系结构,并详细介绍了该系统的工作流程,为无人机综合保障水平的提高提供了有益指导和参考。
无人机;预测与健康管理;体系结构;综合保障
0 引言
随着科技的进步和发展,装备的战斗力不断提升的同时,装备复杂度也不断提高,装备维修保障规模和费用急剧增加。为了减轻装备维修保障负担,降低装备全寿命周期内的使用和维修费用,各国军事研究人员对装备维修保障研究日益关注,促进装备维修模式从传统的事后维修和定期维修模式逐渐向基于状态的维修(condition-based maintenance, CBM)转变,而作为这项转变的技术支撑,装备测试及故障诊断技术也经历了从外部测试到机内测试(built-in test, BIT),再到测试性成为一门独立的学科,综合诊断技术的提出与发展,状态预测与健康管理(prognostics and health management, PHM)技术的提出与应用等的发展演变过程[1]。PHM系统自提出以来,国内外的研究者对系统健康状态评估、寿命预测、故障诊断等诸多关键技术领域开展了诸多研究,形成了大量的宝贵研究成果[2],并在以F-35联合攻击机为代表的多个项目中取得了良好的应用效果[3],有效降低了维修保障费用,提高了战备完好率和任务成功率。
无人机作为一种利用无线电遥控设备和自带程序控制装置操控的新型高技术武器系统,具有无人员伤亡风险、机动性能好、效费比好等诸多优点,已逐渐为世界各国所重视,并在战场上开始崭露头角。而随着无人机在作战中的广泛应用,如何借助PHM技术的应用实现无人机视情维修,提高无人机装备综合保障水平,已成为无人机研究中的热点,国内外诸多学者在该领域开展了诸多研究,取得了大量的研究成果。
本文参考国内外PHM技术研究成果和应用经验,结合我国无人机保障现状及需求[4],研究设计无人机PHM系统,实现对无人机健康状态的评估、预测与管理,从而达到提高无人机综合保障能力的目的。
1 无人机PHM系统功能需求分析
PHM系统一般应具备故障检测、故障隔离、增强的诊断、性能检测、故障预测、健康管理、部件寿命追踪等能力[5],结合无人机实际应用运用情况,分析无人机PHM系统应具备如下功能。
1.1 分层次状态监测与评估
无人机系统是一个由动力、航电、武器等多个子系统组成的复杂系统,由于无人驾驶,在其执行任务过程中,工作人员只能通过其上各传感器监测到的信息判断系统工作状态,因此有必要构建完善的覆盖各单机设备、分系统到全系统等多个层次状态监测系统,并综合各类信息与数据评估其自身健康状态,及时发现任务执行及其他时间中无人机出现的性能异常现象。
1.2 状态预测
为提高无人机维修保障能力,实现无人机自主保障,有必要借助必要手段和措施,充分利用各类信息和数据,实现对无人机系统各设备状态的可靠预测,从而估计出装备剩余寿命,为无人机装备实施预防性维修提供技术支撑。
1.3 维修决策与支持
基于状态预测及故障诊断结果,对无人机装备维修方式、级别做出合理决策,并通过对维修系统中的已有维修任务、各类维修资源状态、装备维修需求等多方面进行分析,对无人机维修开展合理规划,从而在保证有效战斗力的同时,最大限度的提高维修资源利用率,提高装备保障水平。
1.4 智能故障诊断
对于无人机使用过程中出现的异常现象,通过有效的获取和利用各类诊断信息,借助多种诊断方法,以灵活的诊断策略对无人机系统运行状态和故障做出正确判断和决策,给出故障信息,并确定故障的部位、类型和严重程度,同时自动隔离出所出现的故障。
1.5 辅助维修
在故障装备维修过程中,为装备维修人员提供多方位、多形式的辅助维修手段,从而保证无人机装备维修的快速开展。
2 无人机PHM体系结构设计
如图1所示,无人机PHM系统主要由机载PHM系统和地面PHM系统两部分组成。机载PHM系统部署在无人机上,主要由单机设备状态信息采集子系统、分系统信息融合与处理子系统、无人机系统状态在线评估子系统、机载状态提示与预警子系统以及数据存储与流转子系统中机载数据管理模块组成,主要完成无人机在线数据采集与存储、状态实时评估与预警等功能;地面PHM系统部署在无人机地面遥控站及部队基地中,主要由数据存储与流转子系统中数据流转设备和基地数据库系统、故障检测与隔离子系统、状态评估与预测子系统、维修决策与规划子系统和维修管理子系统组成,主要完成无人机装备离线数据管理、状态评估、故障装备检测与维修等功能。
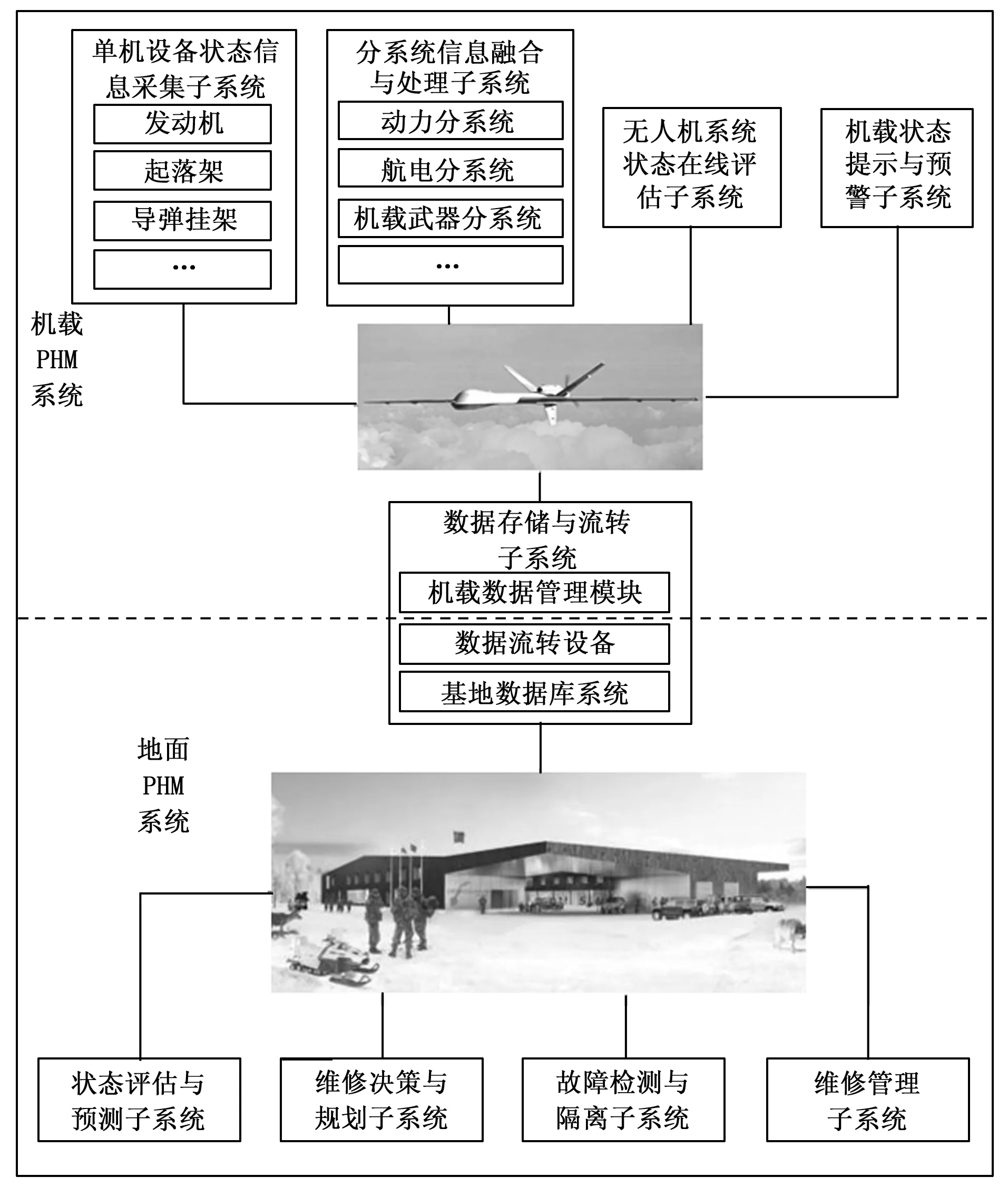
图1 无人机PHM系统体系结构组成图
2.1 单机设备状态信息采集子系统
单机设备状态信息采集子系统由无人机上各设备单机上装载的各传感器、各机内测试设备及相应的监控程序组成,实现对各单机设备状态数据的采集和预处理,并抽取出各采集数据的特征,与设计要求相比较,实时检测系统运行过程中出现的各类异常现象。
2.2 分系统信息融合与处理子系统
分系统信息融合与处理子系统用于实现无人机各分系统的状态评定。它借助针对于该分系统设计的状态评估算法,将该分系统各单机设备状态信息进行融合整理,综合评定出该分系统的运行状态。
2.3 无人机系统状态在线评估子系统
无人机系统状态在线评估子系统用于实现无人机系统级状态评估,它将各分系统多源状态信息数据进行融合和状态初步预测,得到全系统状态信息,并与任务要求相比较,评估当前飞机安全状态及作战任务影响情况。
2.4 机载状态提示与预警子系统
机载状态提示与预警子系统用于无人机任务执行过程中出现的异常状态提示与故障预警,并提供初步的故障诊断能力,根据无人机状态信息进行初步故障推理,将可能的故障原因发给地面站,使工作人员在飞机落地前即可开展故障修复准备工作;此外,该子系统还可按照地面站指令,向地面发送相应的各级设备状态信息。
2.5 数据存储与流转子系统
数据存储与流转子系统用于无人机的状态数据存储与流转。在无人机任务执行过程中,机载数及其他保障数据转存至基地数据库,形成无人机状态数据仓库。
2.6 状态评估与预测子系统
基于无人机数据仓库中的状态数据、各类保障及设计数据,借助相关数据融合及状态评估算法,对无人机装备状态进行全面完善的评估。同时结合各系统具体情况,采用模型驱动的预测算法、数据驱动的预测算法、统计可靠性驱动的预测算法中的一种或多种进行状态预测,预估各系统失效的可能时间点。
2.7 维修决策与规划子系统
维修决策与规划子系统用于确定无人机装备的维修决策,包括对装备的维修方式(修复性维修或预防性维修)、维修级别(大修、中修、小修)等的确定,分析得到装备维修需求,并根据维修系统内的各类维修资源状态及战训任务安排,综合考虑维修中的各因素,借助多目标决策思想,规划出合理的装备维修计划,从而保证故障设备得到合理维修、减少装备突发性故障,从而收获最佳的维修效果。
2.8 故障检测与隔离子系统
故障检测与隔离子系统除为无人机故障诊断中提供相应的通用和专用诊断设备外,还提供一整套的故障诊断专家支持系统,该系统将各类设计、保障及专家知识相整合,通过模拟人类专家推理方法,提供远程专家支持、IETM等多样化的辅助诊断方式,形成强大的故障诊断专家知识及推理支撑,使各类故障的快速检测与隔离,达到智能故障诊断理念的落地应用。
2.9 维修管理子系统
在无人机维修过程中,维修管理子系统负责对维修所需的各类资源进行协调,通过下发工单等方式指导维修工作进行,并为维修人员提供便携式维修设备,辅助维修工作的开展。
3 无人机PHM系统工作流程
无人机PHM系统各部分相互协同配合,共同完成无人机各项监测与保障任务,其基本工作流程如图2所示,其主要包含5个部分:在线状态数据采集与初步分析、数据存储与流转、状态评估与预测、维修决策与规划和故障诊断与维修。
3.1 在线状态数据采集与初步分析
无人机在执行任务过程中,机载PHM系统中单机设备状态信息采集子系统、分系统信息融合与处理子系统、无人机系统状态在线评估子系统共同构建起无人机三级状态监测机制。其中安装在各单机设备上的传感器采集最原始的状态数据和机内测试结果,经过数据预处理、特征提取,并与该特征要求比对,确定单机设备各项指标是否异常;分系统信息融合与处理子系统将组成本分系统的各分机设备状态进行融合,得到该系统状态;无人机系统状态在线评估子系统通过系统综合分析各分系统状态信息,将各系统状态进行融合,并利用任务执行期间的数据开展趋势分析工作,得到无人机当前及任务执行剩余时间内的全系统状态情况,判断无人机当前是否存在状态异常或故障现象。若存在异常现象,则通过与任务要求进行比对,判断故障或异常对作战任务影响情况。
3.2 数据存储与流转
任务执行期间,在对系统各级状态信息分析的同时,也将传感器采集的原始状态数据、各设备、各级评估处理中间结果、异常或故障信息等存储在机载数据卡中,从而为无人机离线状态综合评估提供数据和信息支撑。在系统出现故障或异常现象,并可能危及到任务时,机载状态提示与预警子系统第一时间通过数据链向地面站发送异常或故障信息,并同时开展故障初步诊断推理,将故障推理结果随同异常或故障信息发送给地面,供地面站工作人员决策参考。在需要时,地面站工作人员可通过向机载状态提示与预警子系统发送相关指令,获取更详细的状态信息;若无人机状态不影响任务执行,则无人机在任务执行完毕返回基地后,为避免数据下载导致任务延迟的情况,可通过两种方式将状态数据下载到地面数据中:在任务紧急时,如战时无人机返回基地补充武器后需再次开展任务等情况,此时可直接更换机上数据卡,将换下的数据卡插入地面读写器中读出数据;在任务不太紧急时,可利用数据流转设备,将数据下载到流转设备中,再转存至地面数据库系统中。
3.3 状态评估与预测
为减少对机上计算和存储资源的占用,无人机在线状态监测与评估仅完成基本的指标判定、异常检测和状态初步预测,而地面PHM系统则提供完善的状态评估和预测功能。无人机在返回基地完成数据下载后,状态评估与预测子系统基于该无人机各类设计使用保障数据,随机开展针对该无人机的状态评估结果更新,同时针对各设备不同情况,采用不同的预测方法开展状态预测,如对于无人机机身结构、供电系统等来说,故障模式和失效机理相对简单,存在退化模型的单机或分系统,采用基于模型的预测方法开展性能预测;对于历史工作数据、
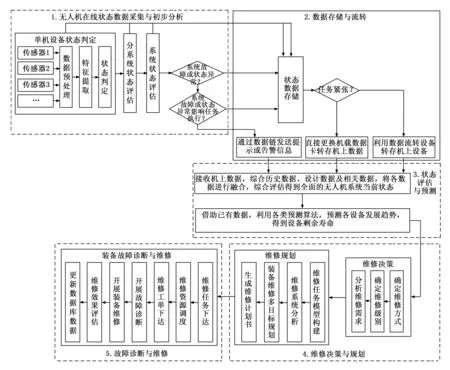
图2 无人机PHM系统工作流程图
故障分析或仿真实验数据积累较为丰富且完整的单机或分系统,可考虑采用基于数据驱动的方法开展性能预测,通过各种数据分析处理方法,挖掘出其中隐含的信息与装备发展趋势;对于历史故障和实验数据中存在典型统计规律的单机或分系统,可以通过对统计数据进行分析,得到相应故障概率密度函数,从而通过该统计可靠性的方法预测装备状态发展。在实际应用中,对于符合以上多种方法要求的设备性能预测,可采用多种方法相复合的方法开展性能预测,从而估计出各设备的失效时间,得到其剩余寿命。
3.4 维修决策与规划
对于已经出现故障的无人机装备,根据装备故障信息及后续任务安排,在决策人员的共同参与下,分析出对装备开展修复性维修的维修级别,并评估出装备维修需求;而对于未出现故障的无人机装备,基于无人机离线状态评估和预测的结果,分析装备失效点对战训任务的影响,确定合理的预防性维修时机及维修需求。
得到维修决策结果后,系统读取装备维系需求,构建维修任务模型,明确维修资源需求。之后读取维修系统信息,得到维修系统运行信息,以此作为规划的边界条件,综合考虑维修时间、维修费用、装备战斗力、装备可靠性等多个优化目标,对维修工作开展多目标决策规划,得到综合最优的维修计划。
3.5 故障诊断与维修
在维修系统中,故障检测与隔离子系统为维修工作人员提供诊断技术支持,维修管理子系统为维修管理人员提供资源协调和进度监控手段。
首先,维修任务下达至维修系统后,维修管理人员借助维修管理系统,协调所需的各项维修资源,并对系统内的各项任务开展综合调度,鉴于传统维修保障系统中已形成以工序工步为核心的维修管理模式,维修管理系统通过对各维修工位下发电子工单的形式指导和监督各项维修工序的开展;之后,按照工单要求,维修工作人员在故障检测与隔离子系统的支持下,开展故障诊断与维修工作;最后,在维修工作完成后,维修部门将装备返还使用部门,并将维修过程中产生的各项数据一并导入数据库中,更新无人机装备保障数据库信息。
4 结束语
本文以无人机为研究对象,参考国内外状态预测与健康管理研究成果和应用经验,分析了无人机PHM系统功能需求,并研究设计了无人机PHM系统的体系结构及其工作流程图,为无人机PHM技术的应用提供了设计参考。然而,PHM系统所涉及的诸多技术,如复杂装备系统级的状态评估与预测、故障综合诊断等的研究还未完全成熟,在应用中还存在诸多问题需要解决,因此,在后续的研究中,我们应继续关注国内外先进研究成果和成功应用经验,加强各项基础技术研究,阶段性的推动PHM系统中的各项技术在无人机保障领域的应用,提高无人机综合保障水平。
[1] 张宝珍. 国外综合诊断、预测与健康管理技术的发展及应用[J]. 计算机测量与控制,2008,16(5):591-594.
[2] 彭 宇,刘大同,彭喜元.故障预测与健康管理技术综述[J].电子测量与仪器学报,2010,24(1):1-9.
[3] 张宝珍,曾天翔. PHM:实现F-35经济可承受性目标的关键使能技术[J].航空维修与工程,2005,06:20-23.
[4] 朱 斌,陈 龙,强 弢,等.美军F-35 战斗机PHM体系结构分析[J].计算机测量与控制,2015,23(1):1-7.
[5] Michael G P. Prognostics and health management of electronics[M]. John Wiley & Sons. Inc., Hoboken, New Jersey,2008.
Research on the Architecture Design of UAV PHM System
Cui Jia1,He Jing2,Liu Qi3,Bai Jie4, Cheng Cheng5
(1.Department of Control Engineering, Naval Aeronautical and Astronautical University, Yantai 264001, China;2.Beijing Institute of Mechanical and Electric Engineering, Beijing 100074, China;3.Naval Equipment Department, Beijing 100841, China; 4.UAV Technology Institute, CASIC, Beijing 100074, China;5.Beijing Aerospace Measurement & Control Technology Co.,Ltd, Beijing 100041, China)
According to the requirement of the PHM (Prognostics and Health Management) technology in the field of UAV, this paper refers to the research achievements and application experience of PHM technology at home and abroad, and analyzes the functional requirements of the PHM system for UAV in the domestic situation. It studies and designs the architecture of PHM system for UAV, and explains the working process of the system, which provides useful guidance and reference for the improvement of the UAV integrated support.
UAV; PHM; architecture; integrated support
2016-04-29;
2016-05-26。
崔 嘉(1982-),男,山东文登人,硕士,讲师,主要从事装备管理信息化、计算机应用技术方向的研究。
1671-4598(2016)06-0133-03
10.16526/j.cnki.11-4762/tp.2016.06.036
V279
A
