基于1553B总线接口的星载机构驱动器设计
2016-11-17陈伟蒋范明
陈伟,蒋范明
(上海航天局第八O五研究所,上海 201109)
基于1553B总线接口的星载机构驱动器设计
陈伟,蒋范明
(上海航天局第八O五研究所,上海201109)
机构驱动器在整星天线机构驱动中得到广泛的应用。随着高精度指向卫星对机构驱动器的实时性和可靠性的要求越来越高,传统的、基于RS 422接口的驱动器已经无法满足系统的要求。因此,提出了一种基于1553B总线接口的星载机构驱动器的设计方案,并对驱动器的可靠性进行了仿真和试验验证。
驱动器;总线接口;设计方案;可靠性
0 引言
星载机构驱动器作为卫星天线机构驱动部件,是整星的重要组成部分[1]。随着高精度指向卫星的发展,对机构驱动器的实时性和可靠性有了更高的要求。传统的、基于RS 422接口的机构驱动器已经无法满足越来越高的实时性要求,把成熟的1553B总线接口技术引入机构驱动器的设计中,可以极大地提高机构驱动器的性能,因此,本文提出一种基于1553B总线接口的星载机构驱动器的设计方案,并对该驱动器的功能、性能和可靠性进行了验证。
1 基于1553B接口的星载机构驱动器的设计
1.1 1553B总线通信
1553B总线是MIL-STD-1553B的简称,其全称是 “飞机内部时分制命令/响应式多路传输数据总线”,它是为了适应飞机的发展而提出的电子系统信息传输标准,由于其具有高可靠性、传输速率高等特点,因而逐渐地被广泛地应用于航空航天领域。目前1553B总线已经成为了航空航天领域最主要的总线标准[2]。
1553B总线基本结构如图1所示[3]。从图1可以看出,1553B总线采用了集中控制式结构,数据总线采用A总线、B总线双冗余电缆,由1个总线控制器 (BC)、一个可选的总线监控器 (MT)和最多可达31个远程终端设备 (RT)组成。
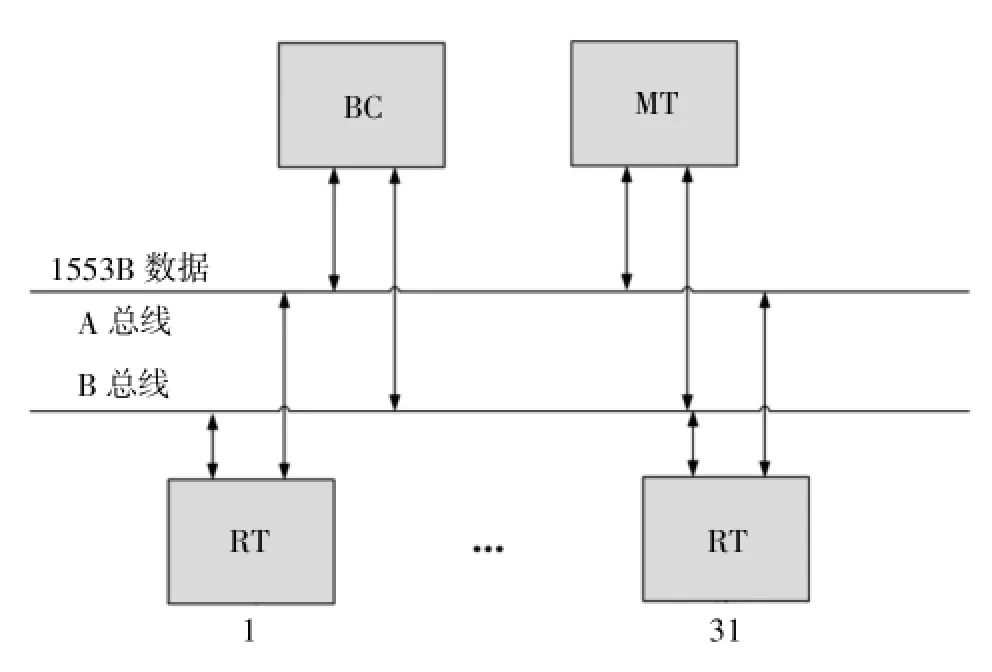
图1 1553B总线结构图
MIL-STD-1553B数据总线的主要特性:1)具有双向传输性,传输方式为半双工方式,采用异步通信方式,数据传输速率是1 MHz;2)具有命令字、数据字和状态字3种字格式,每个字长20位,其中,数据位为16位;3)在一条消息中最多可传送32个数据字;4)信号以串行数字脉冲的调制方式在数字总线上传输,编码方式采用曼切斯特II型双相电平;5)采用指令/应答协议机制;6)支持单一或多个总线控制器BC;7)采用典型的双冗余,热备份容错方式;8)总线消息方式为控制器至终端、终端至控制器、终端至终端、广播和系统控制5种;9)终端类型有总线控制器BC、远程终端RT和总线监视器MT,一条数据总线的RT最多为31个;10)总线耦合方式有变压器耦合和直接耦合两种;11)传输介质采用双绞屏蔽线[4]。
1553B总线的主要优势包括可靠性和传输速率高等[5-6]:1)1553B总线采用了双冗余热备份的数据总线结构;2)总线控制器具有备份控制器;3)总线协议为指令/应答式握手协议,BC除进行自检外,还定期地向各个RT发送命令,要求各个RT进行相应的自检并回传检查状态,以判定各个RT是否工作正常;4)1553B在传输电缆、耦合变压器噪声抑制和电气隔离等方面都具有严格的规定,使电单机在抗干扰、抗辐射和电磁兼容等方面大大地加强,数传传输的准确率大大地提高;5)1553B总线数据传输误码率≤10-7,并且有很强的检错、纠错功能,收发端采用严格的握手协议,从而使得数据传输的准确性得到了大大的提高。
1.2机构驱动器的硬件设计
星载机构驱动器的硬件主要由驱动控制模块及相应的电源、遥测和遥控等功能模块组成,其结构框图如图2所示。
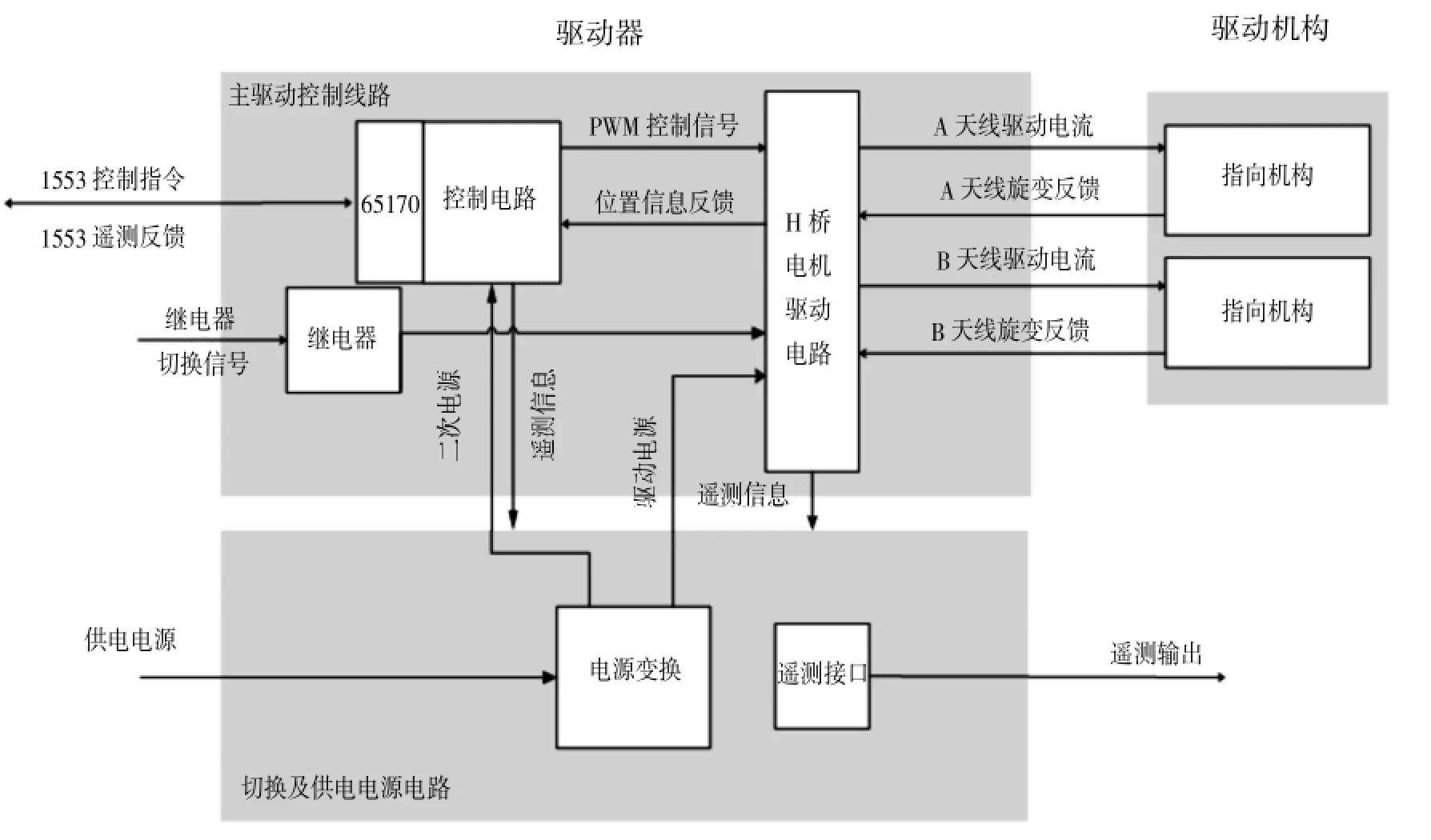
图2 基于1553B总线接口的机构驱动器的结构框图
其中,电源模块提供给驱动线路28 V一次母线供电,并将一次母线供电转换为5 V和±12 V二次电源,提供给控制电路和角度信号处理电路;驱动模块驱动与角度传感器同轴的电机按照指令转动,并通过角度信号处理电路采集机构位置;控制模块采集电流及角度信号遥测信息,通过1553B总线接收总线控制器的内部指令,并根据指令要求控制细分电路及转速电路驱动电机绕组,对系统形成闭环控制。
机构驱动器采用了 “CPU+FPGA”的1553B总线接口,如图3所示。协议芯片采用DDC公司的BU-65170S3,CPU负责协议芯片的初始化、总线数据注入的解析处理和总线内部指令的解析处理,以及组织总线快、慢遥测;FPGA负责控制信号的逻辑译码。1553B总线接口的实物照如图4所示。从图4中可以看出,1553B总线接口采用了变压器耦合方式,耦合变压器采用了BTTC公司的B-3226-T。
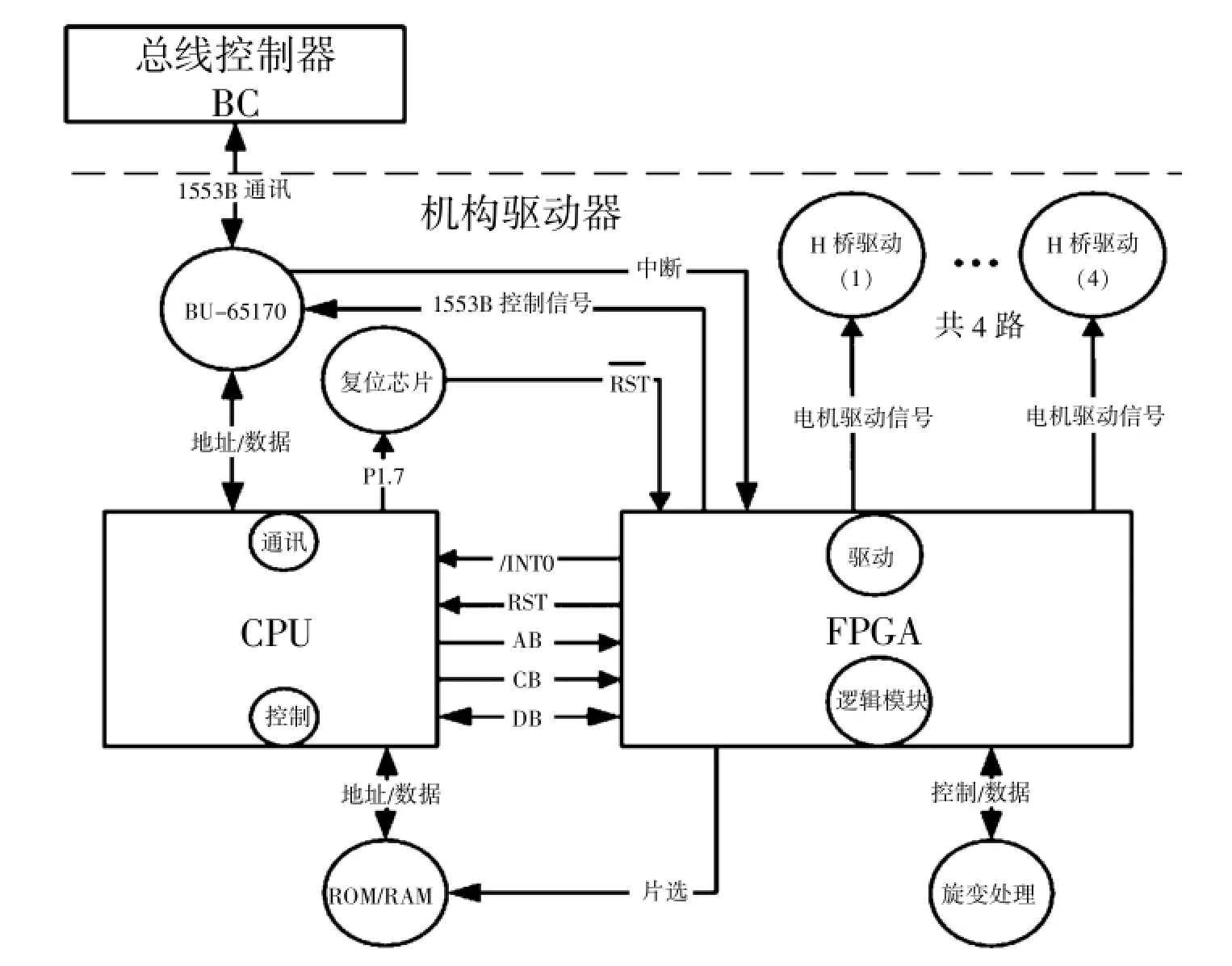
图3 基于CPU+FPGA的1553B总线接口图
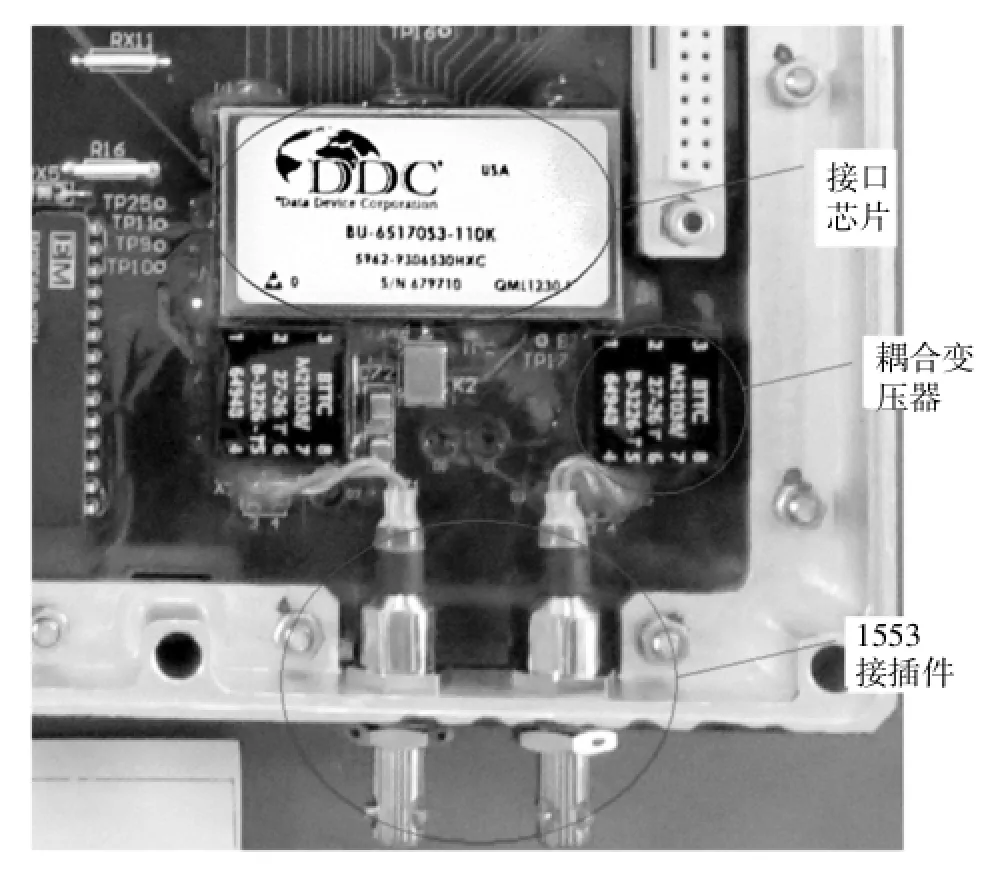
图4 1553B接口实物照图
1.3机构驱动器软件设计
对于由总线控制器发起的数据传输流程,采用更新数据传输机制,总线控制器组织总线数据传输。
对于由远程终端要求的数据传输流程,采用服务请求机制。各远程终端通过总线状态字中的服务请求位来标识数据传输请求,通过矢量字 (16 bits,按位定义数据类型)位来标识请求传输的数据类型。
总线控制器周期性(周期为0.5 s)地依次对各个远程终端进行轮询,即向各个远程终端发出“发送矢量字”方式指令。如返回状态字中的“服务请求位”被设置成1,则说明该远程终端有服务请求。总线控制器将进一步地分析该远程终端返回的矢量字,确定该终端需求的某种或几种特定的数据传输类型,然后生成ACE通信帧,启动总线通信。
各个远程终端一旦在发送缓冲区准备好数据或是请求获取某类数据时,就应将矢量字中的相应位设置成1,并将总线状态字中的服务请求位设置成1;待总线控制器将数据取走或发来数据后,再将矢量字中相应的位设置为0。
各个总线周期、总线控制器和远程终端的动作时序如图5所示。
1.4机构驱动器的功能性能验证
考核天线机构驱动器最重要的指标为指向精度。因而采用机构驱动器分别与A、B天线驱动机构产品进行联试,得到的测试综合指向精度分别如表1-2所示,指标要求理论指向精度误差≤0.3°。从测试结果表可知,机构驱动器的性能完全满足指标要求。
同时,测试机构驱动器驱动天线驱动机构A和驱动机构B的动态指向精度,测得的天线驱动机构A的动态指向精度测试曲线如图6所示,动态指向性能如表3所示;天线驱动机构B的动态指向精度测试曲线如图7所示,动态指向性能如表4所示。由于理论动态指向精度误差指标要求为≤0.7℃,因此,由测试结果可知,机构驱动器的动态指向精度指标满足要求。
1.5机构驱动器的可靠性验证
1.5.1热仿真
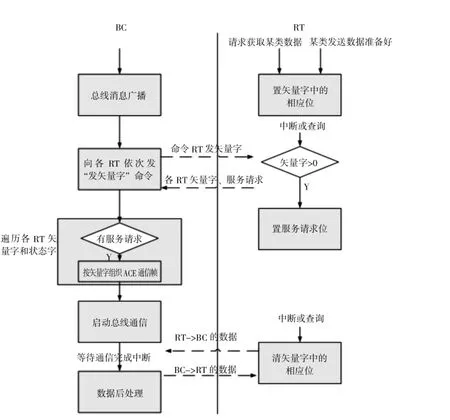
图5 总线控制器BC与远程终端RT间的动作时序图
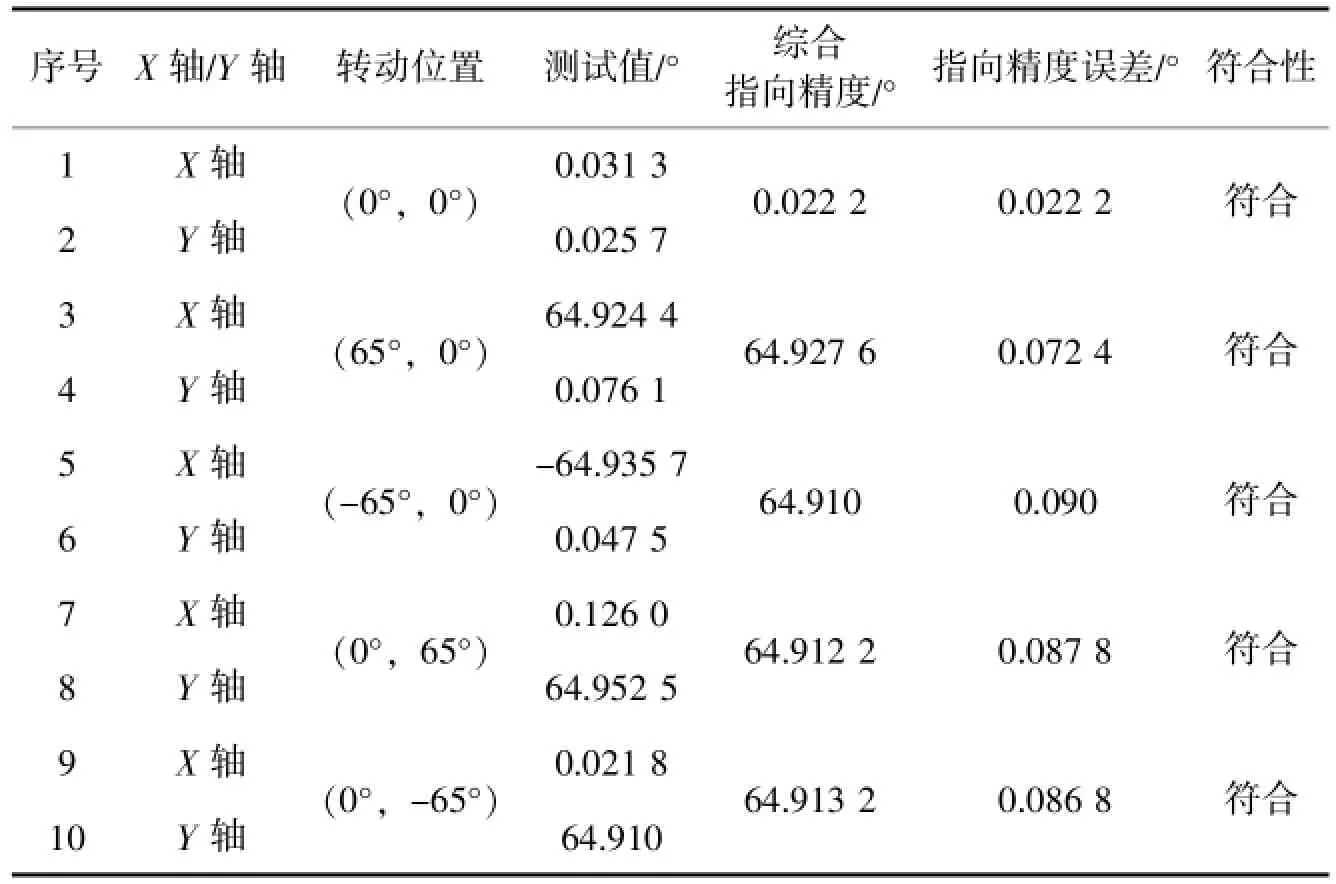
表1天线驱动机构A的指向精度测试结果表
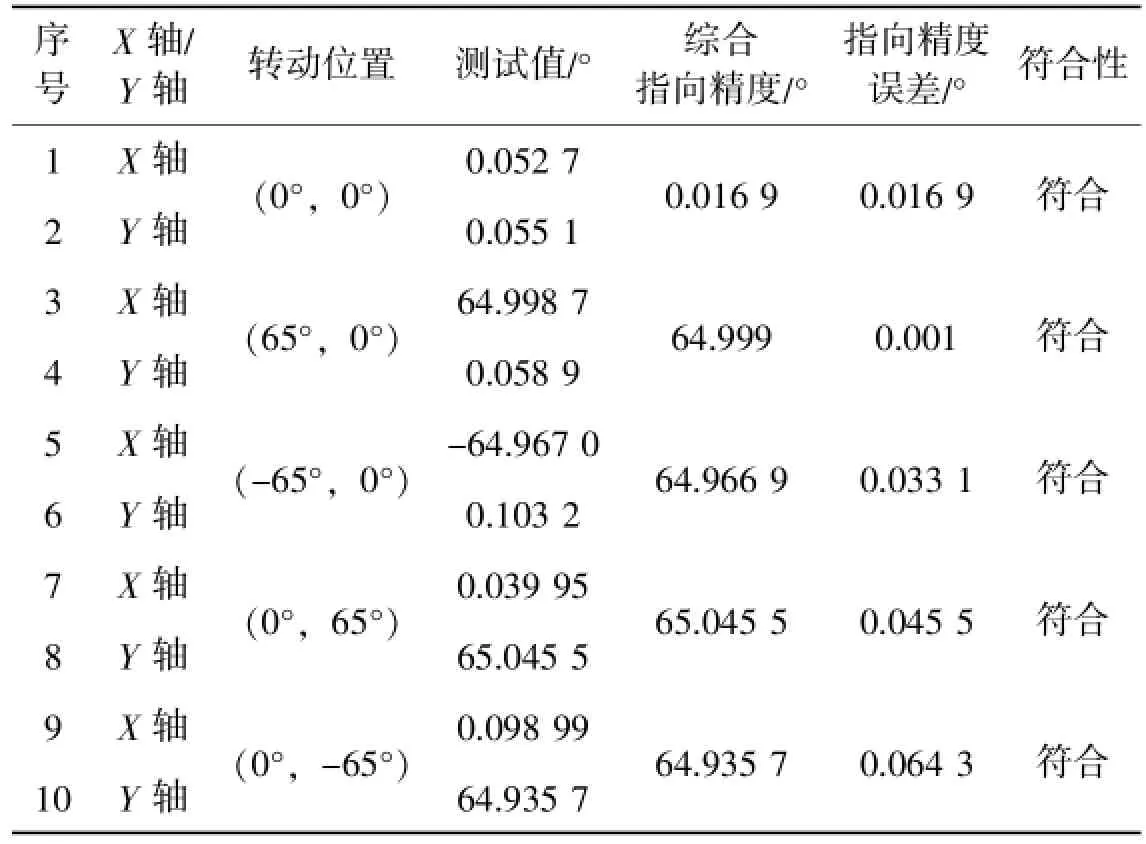
表2 天线驱动机构B的指向精度测试结果表
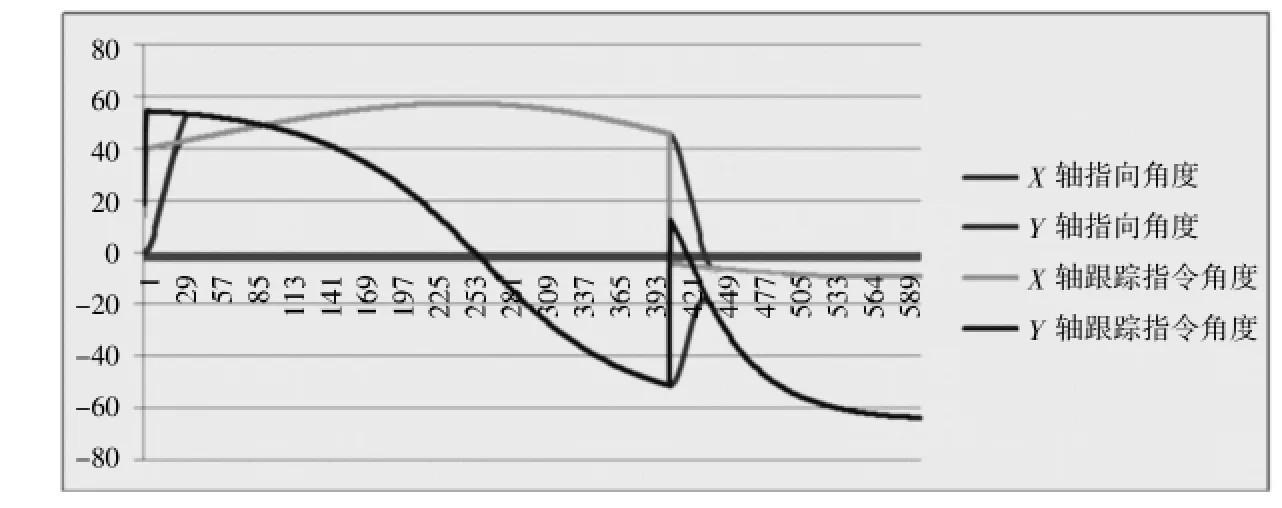
图6 天线驱动机构A的动态指向精度测试曲线

表3 天线驱动机构A的动态指向精度性能参数表
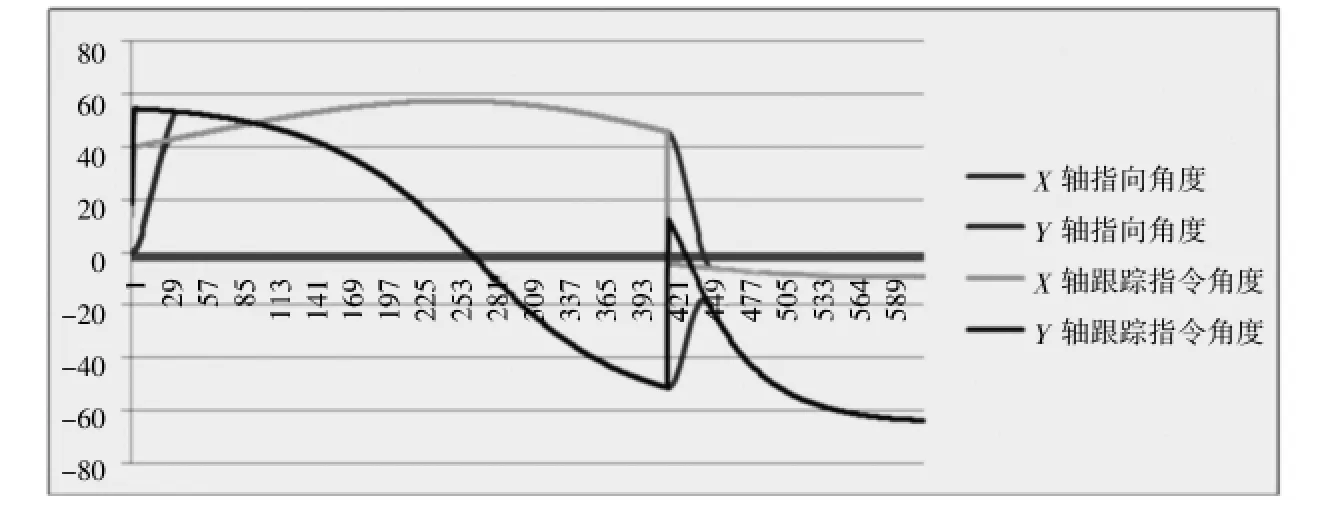
图7 天线驱动机构B的动态指向精度测试曲线

表4 天线驱动机构B的动态指向精度性能参数表
使用FEMAP软件作为前、后处理器,采用TMG软件作为求解器,建立控制器热分析模型。环境温度为+55℃、总热耗约26.8 W时,驱动器的温度分布在+60.5~+94.1℃之间,此时驱动器整体及各元器件的温度分布云图如图8所示;环境温度为-20℃、总热耗约26.8 W时,驱动器的温度分布在-19.4~+26.4℃之间,此时驱动器的整体温度分布云图如图9所示。实际驱动器的工作温度在-10~+45℃之间,驱动器的温度分布更优,能够满足驱动器的正常工作温度为-55~+125℃的要求。
图8 +55℃环境下的驱动器热仿真
图9 -20℃环境下的驱动器热仿真
1.5.2力仿真
对单机结构进行模态分析,固定模型的6个支脚。结构的前六阶振型如图10-14所示,其中,一阶、六阶为内部支承结构局部横向(Z向)模态;三阶、四阶为内部支承结构局部横向 (Y向)模态;二阶、五阶为内部支承结构局部纵向(X向)模态。图12、13给出了结构整体一阶横向(Z、Y向)振型。结构主要模态频率如表5所示,整机模态分析满足要求。
对单机进行冲击试验仿真,冲击试验中结构在X、Y、Z 3个方向组合冲击的作用下,元器件加速度响应如图15所示,内部印制板、主要框架结构的等效应力云图分别如图16-17所示。由计算结果可知,组合冲击时,元器件最大加速度为88.5 g;印制板等效应力为51.3 MPa,主要集中在螺栓孔位置;主要框架的等效应力最大为48.4 MPa;结构强度的剩余系数为2.53,均符合设计要求。
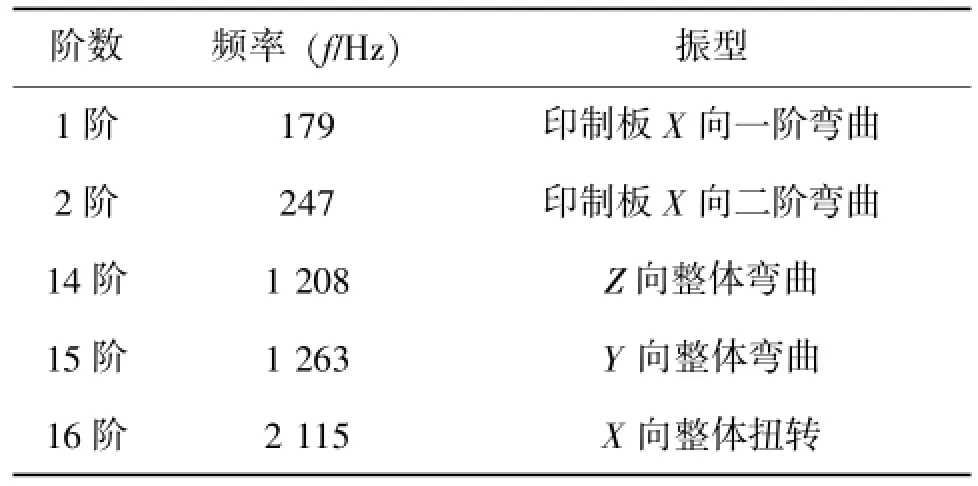
表5 支脚底部固支结构的主要模态频率
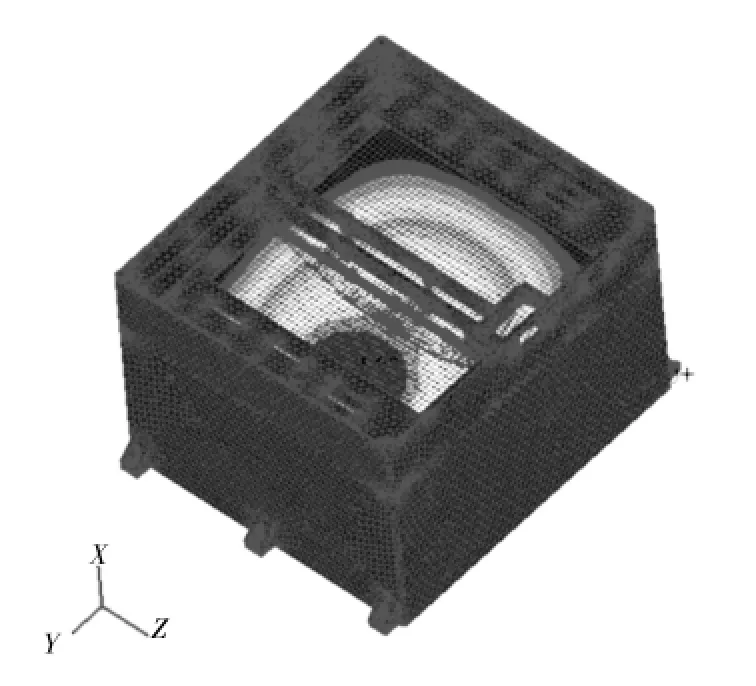
图10 印制板X向一阶弯曲
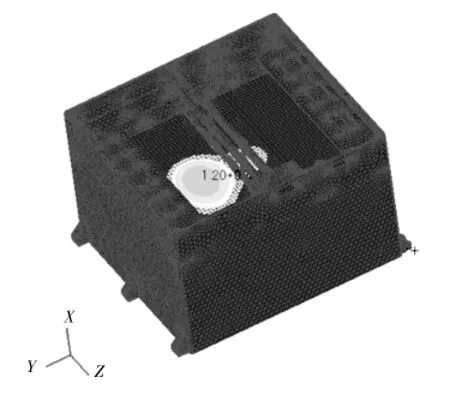
图11 印制板X向二阶弯曲
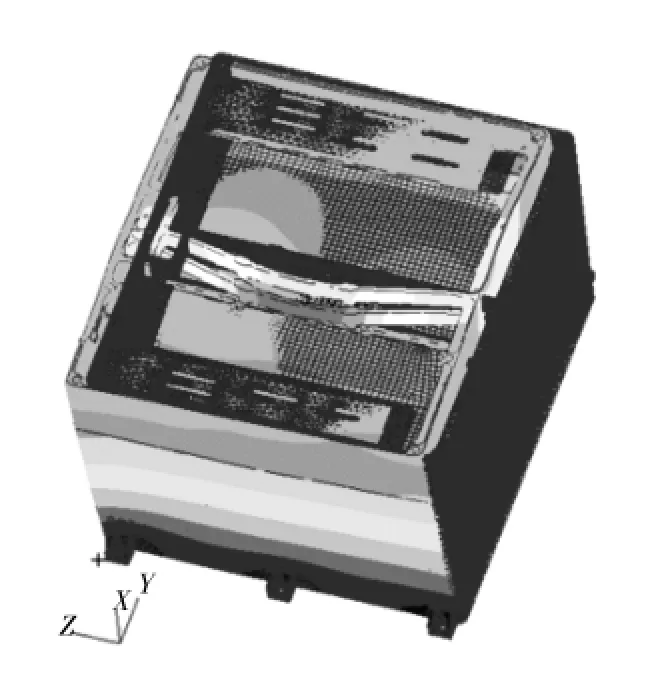
图12 Z向整体弯曲
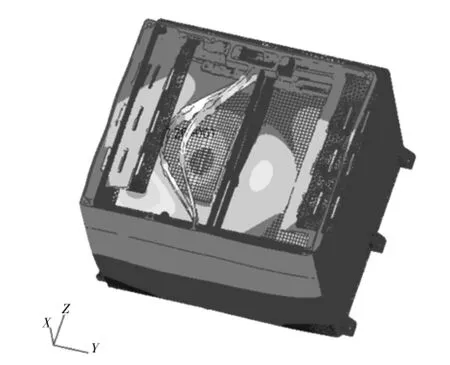
图13 Y向整体弯曲
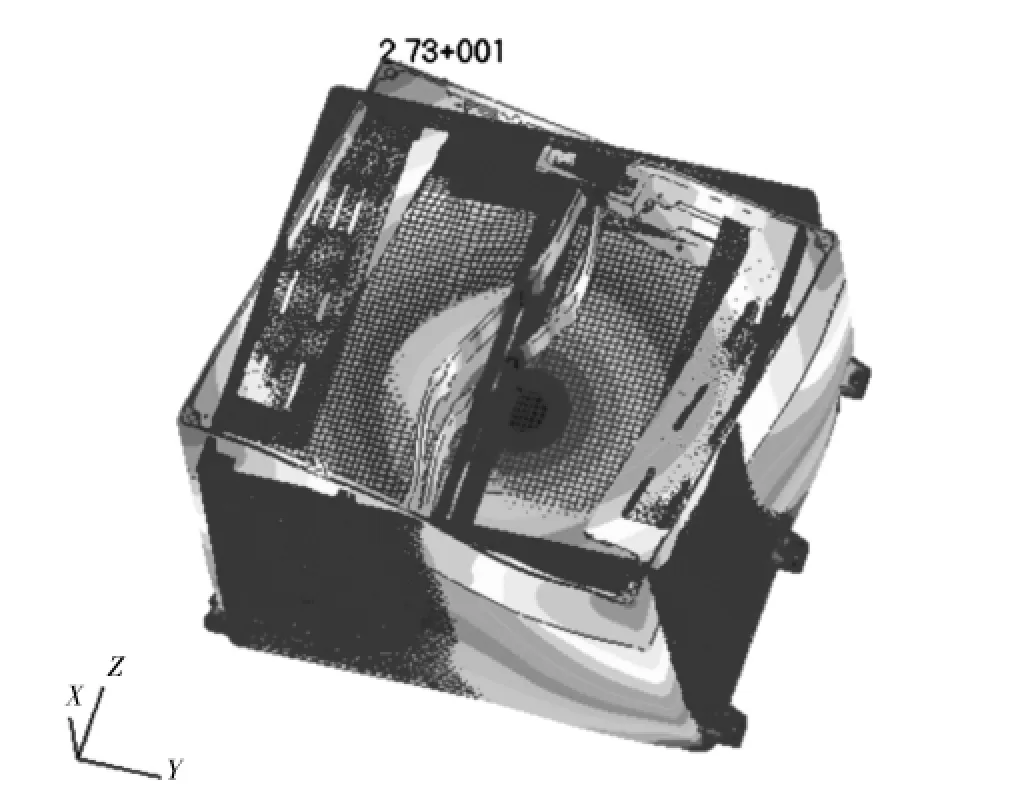
图14 X向整体扭转
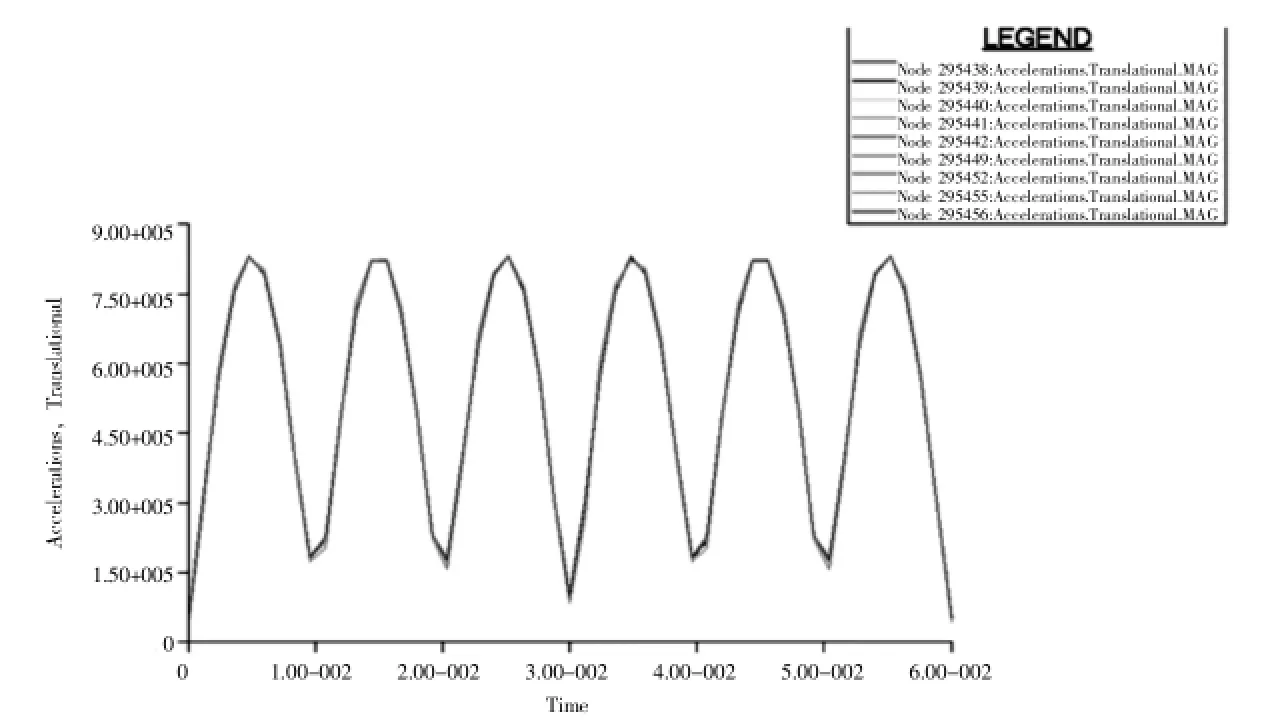
图15 关键位置的加速度响应 单位:g
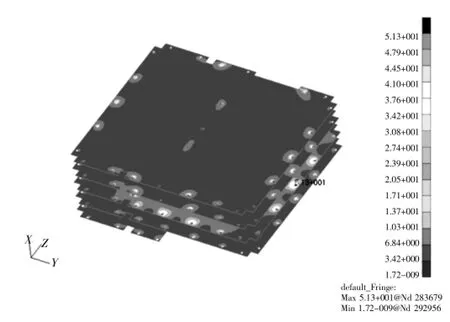
图16 内部支承结构的等效应力 单位:MPa
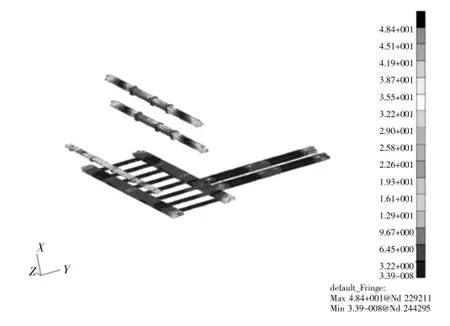
图17 主要框架的等效应力 单位:MPa
1.5.3可靠性试验
为了验证基于1553B接口的星载机构驱动器的可靠性,单机进行了力、热、磁、EMC和老练试验等各项鉴定级试验考核,具体的项目如表6所示。热循环试验的照片如图18所示,高温老练试验的照片如图19所示。经过鉴定试验考核,发现单机功能性能正常,能够适应卫星飞行主动段及在轨的环境试验要求。
图18 热循环试验的照片
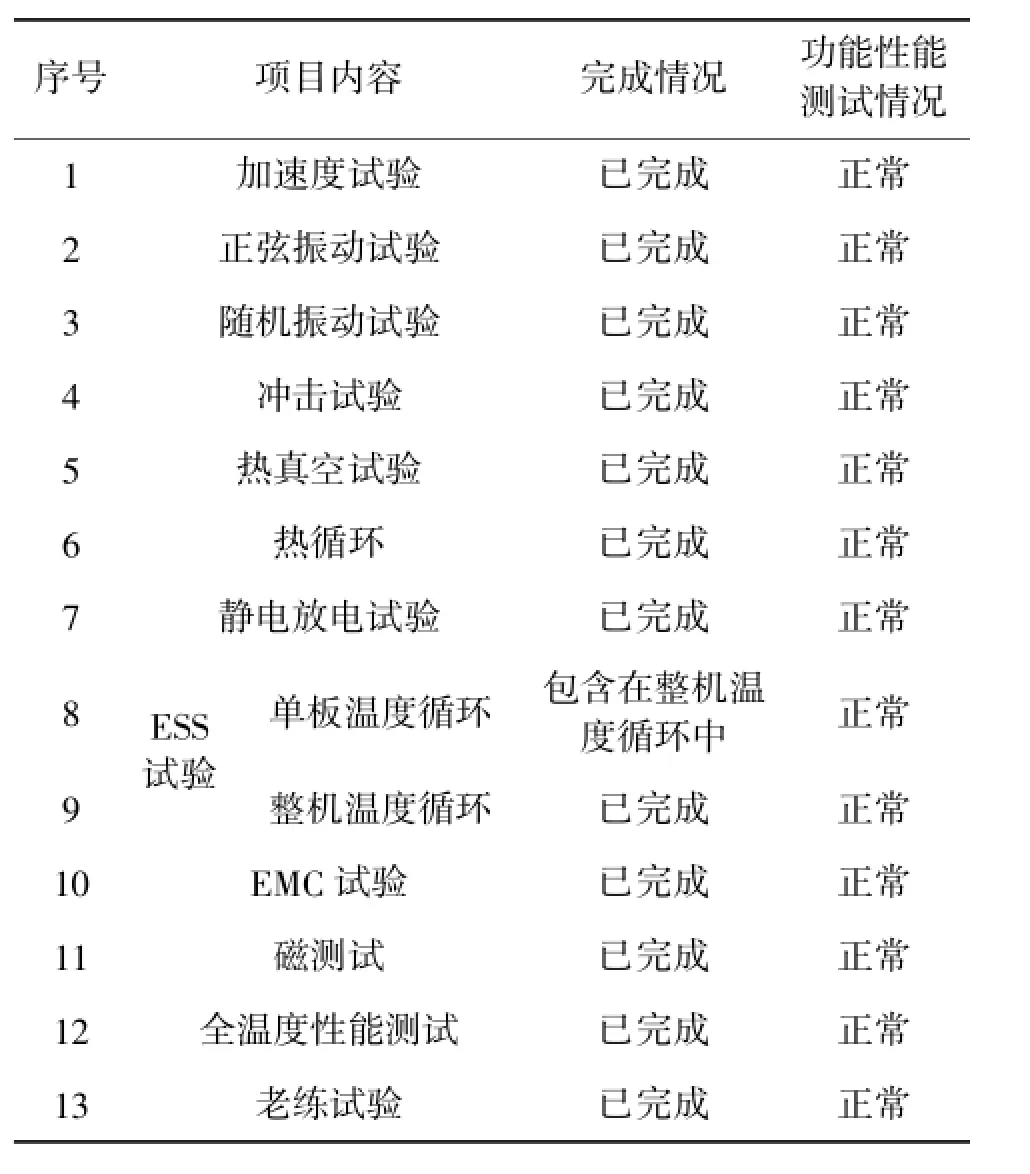
表6 机构驱动器环境试验项目表

图19 高温老练试验的照片
2 结束语
本文提出了一种基于1553B总线接口的星载机构驱动器的设计方案,该方案利用1553B总线接口的可靠性和传输速率高的优点,大大地提高了单机的可靠性和实时性。该方案已经应用于型号产品中,产品经过鉴定级试验的考核后,功能性能均正常。该方案为后续星上机构驱动器的设计提供了一种更加可靠的设计方案,具有重要的现实意义。
[1]陈伟.星载天线驱动器磁保持继电继触点保护技术 [J].电子产品可靠性与环境试验,2016,34(1):26-31.
[2]中国电子技术标准化研究所.光纤化的飞机内部时分制指令/响应式多路传输数据总线:ST 20539-1995[S].
[3]数字式时分制指令/响应型多路传输数据总线:GJB 289A-97[S].
[4]Digital time division command/response multiplex data bus: AIR FORCE MIL-STD-1553B CHG NOTICE[S].
[5]廉保旺,李勇,张怡,等.CAN总线与1553B总线性能分析比较 [J].数字化,2000,19(6):47-49.
[6]熊华钢.1553B总线通信技术的应用与发展 [J].通信与电视,2003,23(3):301-304.
The Design of Mechanism Driver for Satellite Based on 1553B Bus Interface
CHEN Wei,JIANG Fan-ming
(No.805 Research Institute of SAST,Shanghai 201109,China)
The mechanism driver is widely used in the antenna driver of satellite.As the requirements of high-precision pointing satellite to mechanism driver become increasingly higher,the traditional RS 422 interface-based driver has been unable to meet the requirements of the system.Therefore,a design scheme of mechanism driver for satellite based on 1533B bus interface is proposed,and the reliability of the driver is simulated and tested.
driver;bus interface;design scheme;reliability
V 443;TP 336
A
1672-5468(2016)05-0034-08
10.3969/j.issn.1672-5468.2016.05.008
2016-04-07
陈伟 (1982-),男,福建漳平人,上海航天局第八○五研究所电气控制室工程师,硕士,从事星载机构驱动器的研制开发工作。
