配电房轨道式自动巡检机器人控制系统设计与实现
2016-11-17张吉沐阳吴益飞
胡 楠,张吉沐阳,郭 健,吴益飞
(南京理工大学 自动化学院,南京 210094)
配电房轨道式自动巡检机器人控制系统设计与实现
胡 楠,张吉沐阳,郭 健,吴益飞
(南京理工大学 自动化学院,南京 210094)
针对配电房等室内电力系统供电设备自动巡检的需求,提出了以微控制器MSP430F5438为核心的自动巡检机器人控制系统总体设计方案;采用模块化方法完成了控制系统硬件电路设计,主要包括:主控模块、电源模块、运动控制模块、通信模块和数据采集模块;介绍了控制系统软件的总体流程,完成了控制系统嵌入式软件及其上位机监控软件的设计;实验结果表明,所设计的控制系统应用于巡检机器人可以实现对配电房供电设备的自动巡检,从而验证了控制系统的有效性与合理性,具有显著的推广应用价值。
配电房;轨道式;自动巡检;机器人
0 引言
配电是电力系统中直接与用户相连并向用户分配电能的环节,配电设备的状态是否正常直接关系到用户用电质量,保证配电设备的正常运行至关重要。由于目前国内配电房内的设备如进线柜、出线柜、电容柜等均不自带数据采集模块,不能自动向工作人员发送自身状态信息,仍需要人工巡检[1-2]。由于设备数量较多、巡检工作量较大、工作人员的技术水平良莠不齐,因此人工日常巡检维护不能得到充分的保障,有时甚至不能发现设备的异常状况,无法及时处理问题,造成错检、漏检等现象,带来巨大的损失[3-4]。
本文提出一种配电房轨道式自动巡检机器人控制系统,在接收到放置在配电房内的上位机发送的控制命令后,可控制巡检机器人本体基于轨道运行,并精确运行至待测位置,通过携带的多种检测传感器,完成对设备柜体号、指示灯、开关按钮、仪表读数、柜体内部温度、柜体内部局部放电现象和室内环境温湿度等信息的采集,同时将信息实时传送至上位机分析处理,以便工作人员及时监控设备状态,大大提高了设备状态检测的准确性、实时性以及自动化水平,具有广阔的应用前景。
1 控制系统总体设计
机器人本体外形结构如图1所示,本体具有3个自由度,包括轨道小车、竖直机械手和水平机械手。机器人本体在轨道小车的带动下,基于悬挂在空中的轨道前后运行,能适应配电房内狭小的空间,避免对设备造成影响。两轴机械手携带检测传感器,以线性同步带模组为传动机构,竖直机械手上下运动,实现对不同高度设备信息的检测;水平机械手左右运动,可以使传感器紧贴柜体表面,完成柜体内部局部放电现象的检测。

图1 巡检机器人本体外形结构图
巡检机器人控制系统总体结构框图如图2所示。控制系统由主控模块、电源模块、运动控制模块、通信模块和数据采集模块组成[5]。主控模块以微控制器MSP430F5438为核心;电源模块包括1块锂电池,可为系统其他模块提供电能;运动控制模块包括1个轨道小车电机、1个竖直机械手电机和1个水平机械手电机,还包括电机驱动器、编码器和限位保护传感器;通信模块包括1个无线路由器和1个RS485转TCP/IP协议转换器,实现机器人与上位机的无线通信;数据采集模块由相关检测传感器组成,包括:高清摄像机、红外热像仪、局部放电检测器和温湿度传感器。

图2 控制系统总体结构框图
2 控制系统硬件设计
2.1 主控模块设计
主控模块选用TI公司的微控制器MSP430F5438作为主控核心[6]。该主控芯片超低功耗,工作电压1.8-3.6 V,适合工作于电池供电的系统;处理能力强,内核为16位RISC处理器;片内资源丰富,I/O口数量众多。主要完成以下任务:与上位机通信;处理编码器、限位开关的反馈信号;产生三轴电机驱动信号并实现调速;对局部放电检测器和温湿度传感器信息进行预处理。
主控芯片资源分配图如图3所示。通过USCI串口通信模块UART模式实现异步串行通信和接收局部放电检测器信息;通过带中断能力的P1和P2口接收编码器、限位保护传感器的反馈信号;通过具有捕获/比较寄存器的16位定时器Timer_A和Timer_B产生3路电机驱动信号,驱动三轴电机;通过多路I/O口控制外部按键、继电器等,并接收温湿度传感器信息。主控芯片和其外围电路集成在1块主控板上。
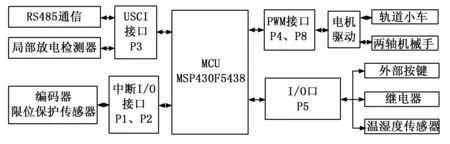
图3 主控芯片资源分配图
2.2 电源模块设计
对于整个控制系统,电源模块电路图如图4所示。电源模块由电池、电源转换模块和充放电电路组成等[7]。电池选用24 V/20 Ah动力锂电池,具有可充电、高倍率、容量大的优点。三轴电机驱动器为24 V供电。检测传感器、无线路由器和协议转换器等设备均为12 V供电,选用OU-24-12-120W型24 V转12 V模块将24 V转换为12 V。采用TBV50AS24型霍尔电压传感器实时监测锂电池电压。电机驱动器供电电路和电池充电电路均采用MGR(JGX)-1 DD220D25型固态继电器控制。

图4 控制系统电源模块电路图
对于主控芯片,供电电压为3.3 V,先由1个HZD10W-24S05型24 V转5 V模块将电池24 V转换为5 V,再由1块TPS7333芯片将5 V转换为3.3 V供给主控芯片。主控芯片电源电路图如图5所示。
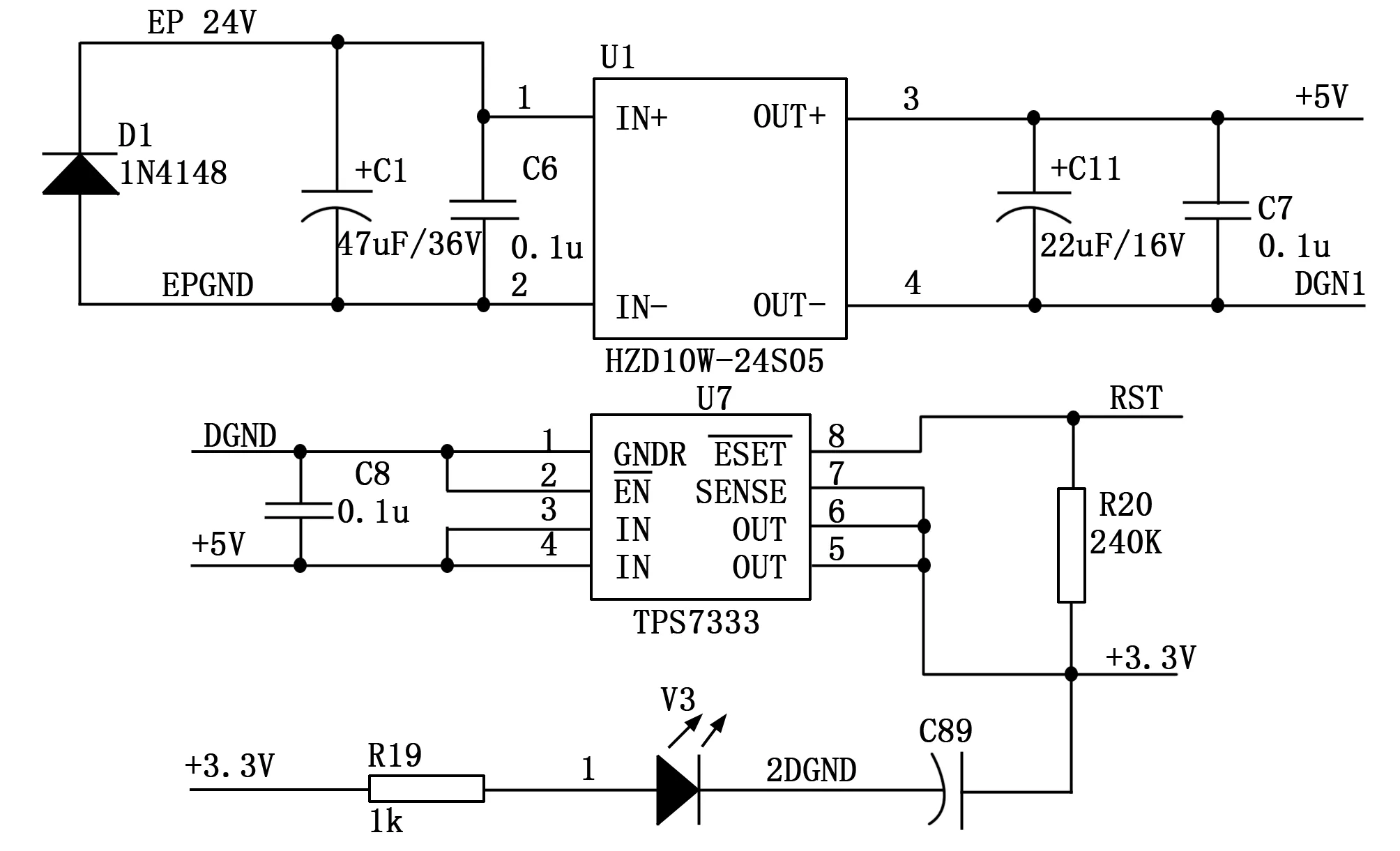
图5 主控芯片电源电路图
2.3 运动控制模块设计
运动控制模块组成结构图如图6所示。

图6 运动控制模块组成结构图
轨道小车电机带动整个机器人本体运动,负载较大,需要较大力矩,且需要较好的调速效果,故采用直流电机驱动。两轴机械手需要实现精确移动,定位精度要求较高,故采用步进电机驱动[8]。
机器人本体总质量为m=80 kg,机器人最大速度为v=0.3 m/s,机器人最大加速度为a=1 m/s2,轨道小车车轮与轨道间摩擦系数为μ=0.2,轨道小车车轮半径为r=0.03 m,直流电机所需功率:


(1)
直流电机所需转矩:


(2)
直流电机所需额定转速:
(3)
故直流电机选用24 V、90 W、100 r/min、5.4 N·m的Z62DP2490-30S型直流减速电机,减速比1:30。
直流电机采用脉宽调制控制,通过主控芯片的P4.1口产生PWM驱动信号DCPWM,经过SN74HCT245缓冲芯片后提供给STDQ2430型直流电机驱动器。通过调节PWM信号的占空比实现调速,使轨道小车可以选择低速、中速、高速等不同的速度。利用P4.2口产生电机方向控制信号DCDIR,实现电机的正反转;利用P4.3口产生驱动器使能信号DCEN。所有控制信号都经过TLP521-1光耦隔离,以提高可靠性和抗干扰能力。
竖直机械手负载质量为m1=40 kg,同步轮半径r1=0.015 m,竖直机械手电机所需保持力矩:
T1=m1gr1=40×10×0.015=6N·m
(4)
故竖直机械手电机选用24 V、6.3 N·m的Y09-59D3-7538M型减速刹车步进电机,步距角1.8°,减速比1:4,刹车起到安全保护作用,防止因系统突然断电而导致负载跌落。水平机械手负载只有局部放电检测器,质量较轻,故水平机械手电机选用24 V、1.4 N·m的Y07-59D1-3074型步进电机,步距角1.8°。
步进电机采用脉冲控制,由主控芯片的P4.4、P4.5口产生两路脉冲信号STEP1、STEP2,经过SN74HCT245缓冲芯片后分别提供给2台YARAK'SR Y2SSR型步进电机驱动器。通过调节脉冲信号的频率实现调速,使两轴机械手可以选择低速、中速、高速等不同的速度。由P8.1-P8.4四个I/O口产生两路方向信号DIR1、DIR2和两路驱动器使能信号EN1、EN2。所有控制信号都经过TLP521-1光耦隔离,以提高可靠性和抗干扰能力。
当3个电机中的1个运行时,另外2个电机保持静止状态。3个电机分别对应3个2500线增量式编码器,分别记录各电机的运行情况,将所记录的脉冲数反馈给主控模块。限位保护传感器选用TR12-4DN型圆柱形接近开关,可以限制三轴方向上的运行范围,在起到安全保护作用的同时,又可以作为零位开关为3个编码器提供清零信号。
2.4 通信模块设计
通信模块电路图如图7所示。通过主控芯片的USCI串行接口以RS485协议通信,用MAX3485芯片实现电平转换,将主控芯片输出的TTL电平转换为RS485差分信号。
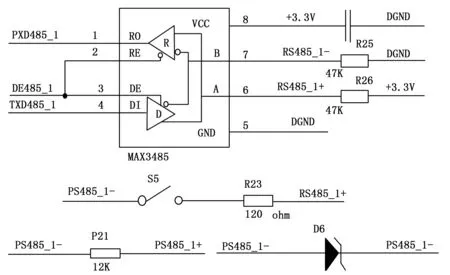
图7 RS485通信电路图
上位机为1台PC终端计算机。机器人本体携带1台NETGEAR JWNR2000v3型无线路由器,路由器共享一个专有WiFi网络,PC终端计算机接入该网络,通过5.8 GHz以太网的方式与机器人进行通信。主控芯片不能直接接收以太网TCP/IP协议信息,需要进行以太网协议和串口协议的相互转换,故通信模块还包括1台C2000 N1AS型RS485转TCP/IP协议转换器。
2.5 数据采集模块设计
数据采集模块组成图8如图所示。

图8 数据采集模块组成图
高清摄像机选用130万像素、20倍光学变焦的DS-2ZCN2006型,采集设备柜体号、指示灯、开关按钮、仪表读数的图像和视频信息;红外热像仪选用MAG32HF型,通过红外热成像原理,采集设备柜体内部温度的图像和视频信息;局部放电检测器通过超声波和瞬态地电波检测原理,采集设备柜体内部局部放电信息;温湿度传感器选用AM2301型,采集室内周围环境的温度和湿度信息。高清摄像机和红外热像仪均通过自带的网口与无线路由器LAN口相连,无需本地处理,直接将图像和视频信息发送至上位机分析处理并显示;局部放电检测器信息和温湿度传感器信息经过主控模块预处理后再传送至上位机显示。
3 控制系统软件设计
机器人控制系统嵌入式软件使用C语言设计,基于IAR Embedded Workbench for MSP430开发环境开发,主要包括主程序、通信子程序和运动控制子程序[9]。
主程序主要包括MSP430F5438硬件系统初始化和对子程序的调用等。硬件系统初始化包括晶振、I/O口方向和功能、定时器、串口等的初始化。硬件系统初始化完成后,进入while(1)循环,不断等待上位机发送的控制命令,当接收到控制命令后,解析命令并执行相应动作,执行完相应动作后继续等待下一个命令。主程序流程图如图9所示。

图9 主程序流程图
通信子程序实现了控制命令的解析和相关数据信息的发送。上位机控制命令通过数据帧的形式发送,协议长度为6个字节,格式为:“帧头+电机选择+启停+方向+速度+帧尾”,通信子程序对命令进行解析,从而得到应执行的动作,具体协议如表1所示。

表1 控制命令协议
同时,电机运动状态信息、局部放电和温湿度预处理信息也通过数据帧形式发送,协议长度为10个字节,格式为:“帧头+X轴位置+Y轴位置+Z轴位置+X轴速度+Y轴速度+Z轴速度+局部放电信息+温湿度信息+帧尾”,其中,帧头为“0xFB”,帧尾为“0xBF”。状态信息发送流程图如图10所示。

图10 状态信息发送流程图
运动控制子程序产生三轴电机驱动信号,控制三轴电机执行具体动作,并对编码器和限位保护传感器反馈信息进行处理以实现转速闭环控制。运动控制子程序流程图如图11所示。

图11 运动控制子程序流程图
机器人控制系统上位机监控软件基于Windows操作系统设计。软件内部集成有网络通信、图像识别、数据存储、数据处理等功能。具有以下功能:发出控制命令对机器人运动进行控制;处理机器人发送的运行状态信息,实时显示当前机器人的位置和速度;处理检测传感器发送的数据并实时显示在软件界面上。工作人员能清楚地从显示界面上查看机器人当前的巡检情况。
4 控制系统实验
在配电房现场进行巡检实验,通过上位机向机器人发送控制命令:“0xFA 0x01 0xA0 0xC0 0x20 0xAF”,机器人开始沿轨道运行,到达指定位置后停止;接着发送控制命令:“0xFA 0x02 0xA00xC0 0x10 0xAF”,竖直机械手开始运动,到达指定位置后停止,由高清摄像机、红外热像仪完成信息采集;继续发送控制命令:“0xFA 0x03 0xA0 0xC0 0x10 0xAF”,水平机械手开始运动,到达指定位置后停止,由局部放电检测器完成信息采集。在所设计的上位机监控软件界面上实时监控状态信息。
上位机监控软件界面显示有:传感器检测的实时信息:包括高清摄像机、红外热像仪拍摄的图像和视频,局部放电检测器和温湿度传感器检测信息;机器人当前的运动状态:包括三轴的运动位置和速度,通过模拟配电房设备分布图反映机器人本体当前在配电房内的具体位置。经测量:机器人最大速度可达0.32 m/s,定位精度约为2 mm,连续工作时间可达8小时。
巡检结果表明:机器人在所设计的控制系统控制下,能准确、快速、可靠地采集到待测信息,并及时向上位机反馈。工作人员能清楚、及时地获取配电房设备的实时状态,以便对异常情况做出反应。机器人较好地完成了巡检任务,可代替人工完成配电房的巡检工作。
5 结语
本文设计并实现了一种配电房轨道式自动巡检机器人控制系统,该控制系统主要运用于控制三轴机器人本体沿轨道运行,实现对配电房内供电设备的自动巡检。控制系统基于模块化方法设计:包括主控模块、电源模块、运动控制模块、通信模块和数据采集模块。控制系统以微控制器MSP430F5438为核心,各模块间相互配合,较好地完成了多种巡检信息的采集并将结果实时反馈给工作人员。实际现场巡检实验证明了所设计控制系统的有效性与合理性,控制系统具有显著的推广应用价值。
[1] 韦 鹏,徐 攀,窦俊廷,等. 阀厅智能巡检机器人系统[J]. 制造业自动化,2015(7):45-48.[2] Mostashfi A, Fakhari A, Mohammad Ali Badri. A novel design of inspection robot for high-voltage power lines[J]. Industrial Robot: An International Journal,2014,41(2):166-175.
[3] 郑盼龙,迟冬祥. 电力系统中机器人的研究现状与展望[J]. 上海电机学院学报,2013,16(6):347-353.
[4] 鲁守银,钱庆林,张 斌,等. 变电站设备巡检机器人的研制[J]. 电力系统自动化,2006,30(13):94-98.
[5] 马 妍,宋爱国. 基于STM32的力反馈型康复机器人控制系统设计[J]. 测控技术,2014,33(1):74-78.
[6] 郑 毅,朱纪洪. 采用MSP430的舵机控制系统设计及实现[J]. 计算机测量与控制,2014,22(10):3181-3182.
[7] 孟凡军,李声晋,卢 刚,等. 基于多DSP的轮腿式机器人控制系统设计[J]. 微特电机,2011,39(6):59-62.
[8] 冒春艳,杨建飞,戴伟昊,等. 应用于三维打印的运动控制系统设计[J]. 工业控制计算机,2015,28(9):82-83.
[9] 冯新刚. 基于ARM竖井救援机器人设计和实现[J]. 计算机测量与控制,2015,23(9):3172-3173.
Design and Implementation of Control System for Power Distribution Room Orbital Automatic Inspection Robot
Hu Nan,Zhang Jimuyang,Guo Jian,Wu Yifei
(School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China)
According to the demand of automatic inspection of the power equipment of indoor power system such as the power distribution room, an overall design scheme of an automatic inspection robot control system with MCU MSP430F5438 as the core is proposed. The control system hardware circuit is designed by a modular design method, including the main control module, the power module, the motion control module, the communication module and the data collection module. The overall flow of the control system software is introduced and the embedded software and the PC monitoring software of the control system are designed. Experiment results show that the designed control system applied to the inspection robot can implement the automatic inspection of the power equipment of power distribution room, which proves the effectiveness and rationality of the control system. The control system has significant application value.
power distribution room; orbital; automatic inspection; robot
2015-11-30;
2016-01-29。
胡 楠(1991-),男,江苏南京人,硕士研究生,主要从事机器人控制、嵌入式系统方向的研究。
1671-4598(2016)03-0095-04
10.16526/j.cnki.11-4762/tp.2016.03.026
TP3
A
