基于LabVIEW的电子式氧调器PID控制系统的设计
2016-11-17李子轩林贵平
李子轩,林贵平,曾 宇,武 飞
(北京航空航天大学 航空科学与工程学院, 北京 100191)
基于LabVIEW的电子式氧调器PID控制系统的设计
李子轩,林贵平,曾 宇,武 飞
(北京航空航天大学 航空科学与工程学院, 北京 100191)
电子式氧调器是新型氧气调节器,它是飞机供氧系统的核心部件;目前针对电子氧调器,并没有很好的控制调节方法,很难达到现有的性能指标要求;对电子式氧调器的原理进行了分析,基于LabVIEW FPGA设计了一种电子式氧气调节器控制系统的实验研究方法;采用专家PID控制规则对氧调器进行控制并进行了优化改进,在此基础上进行了实验验证;实验结果表明,该控制系统能够对电子式氧调器进行精确控制,其控制程序具有良好的响应速度以及控制精度。
电子式氧气调节器;LabVIEW FPGA;控制规律
0 引言
氧气调节器是供氧系统的核心部件,它能按照供氧规律,供给飞行员足够的氧气或混合气[1]。
机械式氧气调节器经过几十年的发展,其技术已经相当成熟,广泛应用于各代各种型号的军用飞机上,但是随着科学技术的发展和高性能战斗机对供氧系统提出越来越苛刻的要求,机械式氧气调节器渐渐显露出其不足的地方[2],主要表现在:吸气阻力较大、响应速度较慢,尤其是当机载供氧系统发展到分子筛制氧的时候,由于分子筛氧气浓缩器本身的氧气出口压力较低,机械式氧气调节器越来越显现其不足的地方,迫切要求新一代氧气调节器的出现,正是在这种背景下,电子式供氧调节器被提上了研究日程。
在电子式氧调器的研究中,为了满足相关性能指标要求。控制规律的摸索以及控制方案的设计占了主导地位[3]。在用步进电机与音圈电机取代了传统的气动活门后,对电机的精确控制是使电子式氧调器加快响应速度,减小吸气阻力,满足飞行员呼吸性能指标要求的关键因素。
1 电子式氧调器工作原理
本文所述电子式氧调器为直接式电子氧调器,即电机与活门位于同一中心轴线,电机直接驱动活门工作。因为电机直接驱动活门开启与关闭,因此直接式电子氧调器电机行程较短。电机驱动活门到达相应位置所需时间短,响应速度快。
如图1所示。活门上下两侧都收到进气口高压气体的压力作用,两侧压力作用相互抵消,有利于平板活门在高压气源下,受到的气体作用力的影响相对减小,电机的作用力占主导位置,这对于活门的精确控制有着至关重要的影响。人体吸气时,呼吸腔内压力急剧降低,根据控制规律,直流电机向前运动驱动活门开启,气体流经呼吸腔进入面罩向飞行员供氧。人体呼气时,呼吸腔内压力急剧上升,控制程序根据压力变化驱动电机关闭活门,使飞行员呼吸顺畅。
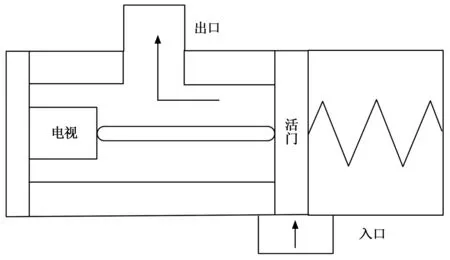
图1 电子式氧气调节器原理图
从电子式氧调器的原理图中可以看出,电机驱动活门控制着氧源进气状态,与飞行员的正常呼吸息息相关。不同的飞行员以及不同的飞行状态下,其呼吸特性不尽相同,因此只有研究出电子式氧调器最优的控制规律和驱动直流电机的最优控制方法,才能使飞行员呼吸达到最舒适的状态。
2 基于LabVIEW的电子式氧调器控制系统硬件设计
电子式氧调器控制器通过实时采集呼吸腔出口压力,经过控制程序的逻辑判断与运算,再控制直流电机前后运动,进而控制活门开关。因此电机响应速度、控制程序运算速度、硬件设备传输信号的快慢是影响氧调器活门动作快慢,呼气阻力与吸气阻力大小的主要因素;而控制逻辑的合理性,稳定性,出现异常情况或者在稳定情况下,驱动直流电机的电压信号是否存在较大的波动,也是影响电子式氧调器正常工作的关键因素。
本文所采用的控制系统的是主要以电测量传感器、NI实时控制器NI cRIO-9076、NI数据采集卡PCI-6221、NI数据采集模块NI-9203、NI模拟输出模块NI-9263和工控机进行数据的自动采集、数据处理、数据记录、波形显示、存储以及实时控制的系统,控制系统的核心程序通过上位机软件编译在NI实时控制器中,循环响应时间在μs级别,可以精确地跟踪人体呼吸行为动作,极大地提高了控制程序运算速度与电机响应速度,使呼吸阻力降低到100 mm水柱之内,有效解决了当前电子式氧调器存在的问题。
控制系统工作流程为:压力传感器将相应被测量值转换成电信号,一路信号经过数据采集模块采集上传到实时控制器,同时另一路信号通过PCI数据采集卡采集上传到上位工控机进行实时数据处理,生成波形,存储数据到本地硬盘。实时控制器根据传入的压力信号通过已写入编译的控制程序运算分析,产生模拟输出信号,通过模拟输出模块传送到电机驱动器对电机进行控制,实时控制器的整个工作过程则通过网线将I/O数据送入上位工控机进行实时显示。
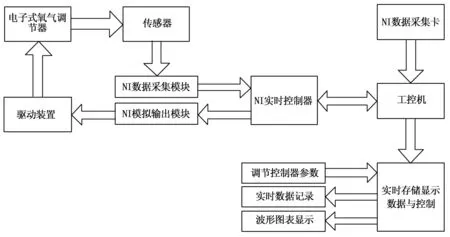
图2 控制系统整体架构示意图
3 电子式氧调器专家级控制规律的实现
本文采用专家级PID控制对电子式氧调器进行控制。电子式氧气调节器的工作原理如图所示。当飞行员通过呼吸面罩吸入呼吸腔内氧气时,呼吸腔内压力降低,NI机箱通过数据采集模块,采集到压力传感器测量出的压力变化信号,然后根据已写好的FPGA控制程序,按照一定的控制方法,通过模拟输出模块输出信号,控制直流音圈电机运动,推动活门打开,氧源气体随之进入呼吸腔内,导致呼吸腔压力随之变化。当飞行员通过呼吸面罩呼出气体时,大部分气体通过面罩排走,此时呼吸腔内压力升高,控制程序根据采集的压力信号,控制电机关闭活门,氧源不在进入呼吸腔,呼吸腔压力随着气体排走而逐渐减小。因此,呼吸腔内的压力变化主要由两种原因引起,一是飞行员通过呼吸面罩从呼吸腔吸出氧气,二是氧源通过进气活门向呼吸腔灌入氧气。若吸气的瞬间,供气氧源流量过小,会增加飞行员的呼气阻力,严重时会出现憋气的情况,导致飞行员出现生命危险;若供气氧源流量过大,氧气大量灌入飞行鱼肺部,出现灌气的情况,影响飞行员的正常工作。二者只有达到平衡状态,飞行员的呼吸才会达到舒适的状态。因此,对于电子式氧调器电机以及活门的精确控制是氧调器工作状态达到性能指标要求的关键所在。
高级PID的控制方法:
利用传统的PID控制方法,在超高速响应的状态下,由于判断条件过于简单,条件单一,会出现严重的超调、震荡等现象,严重影响了飞行员的正常呼吸,并没有达到很好的预期效果。专家级PID是基于受控对象和控制规律的各种知识,并以智能的方式利用这些知识设计的控制器,可以有效地避免绝大多数的超调以及震荡的现象,如图3所示。本文根据飞行员的呼吸特性,在原有专家PID的基础上进行了改进。

图3 专家PID
令e(k)表示离散化的当前采样时刻的误差值,e(k-1)、e(k-2)、分别表示前一个和前两个采样时刻的误差值[5],则有


其中
e(k)=SP-PV
ei(k)=SP-βPV
ed(k)=SP-γPV
根据误差及其变化,可设计专家PID控制器,该控制器可分为5种情况设计[6]:
1)|e(k)|>M1时,实施开环控制。
2)当e(k)Δe(k)>0且|e(k)|≥M2时由控制器实施较强控制作用,其输出可以为
当e(k)Δe(k)>0且|e(k)| 3)当e(k)Δe(k)<0,e(k)Δe(k-1)>0或e(k)=0时,控制器输出不变。 4)当e(k)Δe(k)<0,e(k)Δe(k-1)<0且|e(k)|≥M2时,实施较强控制作用, u(k)=u(k-1)+k1kpem(k) 当e(k)Δe(k)<0,e(k)Δe(k-1)<0且|e(k)| u(k)=u(k-1)+k2kpem(k) 5)当|e(k)|<ε时,此时加入积分,减小稳态误差。 式中,ep(k),ei(k),ed(k):二自由度PID算法的比例、积分、微分权重误差; α,β,γ:二自由度PID算法的误差权重因子,范围0~1; L:是生成非线性增益项的线性度因子,范围0~1; em(k):误差e的第k个极值; u(k),u(k-1):分别为第k次和第k-1次控制器输出; SP,PV:分别为设定值以及过程反馈值; k1:增益放大系数,k1>1; k2:增益抑制系数,0 M1,M2:设定的误差界限,M1>M2; ε=0.001:任意小正实数。 根据飞行员呼吸状态下具体参数,可以初步设定控制器比例、积分、微分增益以及误差权重因子的参数范围,如图4所示。 图4 PID算法的实现控制框图 以氧气为实验气体,在不同的入口压力,肺换气量为30 L/min的情况下,用该电子式氧气调节器PID控制系统进行控制调节,实验结果如图5~8所示。根据国内现有的技术指标要求,在肺通气量为30 L/min的情况下,吸气阻力应小于600 Pa。从图中可以看出,在不同的入口压力下,最大吸气阻力均在400 Pa左右,实验结果已满足指标要求。 图5 气源入口压力1.0 bar 图6 气源入口压力2.0 bar 图7 气源入口压力3.0 bar 图8 气源入口压力4.0 bar 实验结果分析如下: 1)从图中可以看出,该控制系统可以将所需实验数据全部采集并记录下来,同时可以实时的控制电子式氧气调节器正常的工作,这为以后更好地进行科学研究提供了方法。 2)从图中可以看出,呼气动作与吸气动作转换瞬间,没有出现憋气和灌气现象,说明该控制系统的硬件响应速度满足了飞行员呼吸的性能要求,可以进行精确的调节与控制。 3)不同的入口压力条件下,通过对比图中曲线可以看出,电机电压随着入口压力的增大而减小。这是因为当入口压力增大时,同等条件下,通过活门进入呼吸腔的氧气量更大。因此当需要相同的肺通气量时,入口压力越大,活门开度则相应减小。 4)对比不同的入口压力条件下各个曲线变化趋势基本相同,说明该控制系统所用控制规律具有很好的适应性。在不同的肺通气量下进行大量的实验验证,实验结果均满足性能技术指标要求,在此不再一一列举。 本文给出了一种电子式氧气调节器控制规律研究方案:采用先进的NI实时控制器,数据采集卡,数据采集模块以及模拟输出模块,基于LabVIEW大开发环境,采用FPGA编程模式进行控制系统的设计、开发。该控制系统可以实时的采集电 子式氧气调节器的各项性能参数,并根据控制规则,精确高速地控制氧调器正常工作。实验结果表明,实验所用电子式氧气调节器在吸气阻力等性能指标上,均已达到已有的技术指标要求。该控制系统在电子式氧气调节器未来的研究中,具有很好的应用前景。 [1] 肖华军.航空供氧防护装备生理学[M].北京:军事医学科学出版社,2005. [2] 俞 笑,孙 兵,林贵平.ATmegal128单片机在电子式氧气调节器上的应用[J].微计算机应用,2009,30(12):50-56. [3] 孙灿飞,蔡元友,龙海军.电子式氧气调节器中步进电机模糊控制技术研究[J].测控技术,2013,32(4):78-81. [4] 陈树学,刘 萱.LabVIEW宝典[M].北京:电子工业出版社,2011. [5] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004. [6] 张海龙,马铁华,谢 锐,等.专家PID控制算法在循迹机器人中的应用[J].电子测试,2013(1):33-35. Control System Designed for Electronic Oxygen Regulator Based on LabVIEW Li Zixuan,Lin Guiping,Zeng Yu,Wu Fei (School of Aeronautic Science and Engineering, Beihang University, Beijing 100191, China) Aircraft electronic oxygen regulator (AEOR) is a new type of oxygen regulator which is the core of the Oxygen Supply System. At present, there is no good control method for the electronic oxygen regulator to meet the requirements of the existing technical index. By analyzing the principle of the AEOR, a new experimental research method of control system was designed for AEOR based on LabVIEW FPGA. Expert PID control rule was used and optimized to improve. The experiment result indicated that the AEOR control system was accurately performed and the control program had good response speed and control precision. electronic oxygen regulator; LabVIEW FPGA; control program 2015-09-12; 2015-10-30。 李子轩(1990-),男,河北石家庄人,硕士研究生,主要从事飞行器环境控制方向的研究。 1671-4598(2016)03-0080-04 10.16526/j.cnki.11-4762/tp.2016.03.022 TP3 A
4 实验和结果分析



5 结论
