直流伺服系统中CAN总线的干扰问题研究
2016-11-15赵亚斌罗利文
赵亚斌 ,罗利文
(上海交通大学 电子信息与电气工程学院,上海 200240)
直流伺服系统中CAN总线的干扰问题研究
赵亚斌 ,罗利文
(上海交通大学 电子信息与电气工程学院,上海 200240)
当前直流伺服系统和变频驱动电源得到广泛应用,这些设备基本都配置了工业现场总线通信(例如CAN总线通信),方便远程控制。但这些设备中的功率开关器件在正常运行时产生的干扰常常会导致现场总线通信无法正常工作。文章全面分析了干扰产生的机理、可能的干扰源及干扰的耦合路径,并从阻断干扰路径和提高受扰对象的抗干扰能力两个方面提出了此类通信干扰的解决方法。
伺服驱动;CAN总线;干扰;共模电流
0 引言
随着电力电子技术的快速发展,电力电子装置越来越多地应用于工业中。然而,随着这些电力电子装置的广泛应用,工业现场的电磁环境越来越恶劣,对工业现场总线通信的稳定性和可靠性提出了挑战。为了保证工业现场总线通信的稳定性和可靠性,应用时必须全面考虑现场环境周围设备及有直接电气连接的设备可能对其产生的干扰,积极采用各种方法去应对潜在的干扰。
CAN总线[1]作为一种工业现场总线,在上世纪80年代初由德国博世公司提出,其通信距离最远可达10 km(速率<5 kb/s),通信速率最高可达1 Mb/s(通信距离<40 m)。因其可靠性、实时性和灵活性强的特点,广泛应用于汽车业、航空业、工业控制、安全防护等领域。
1 提出问题
某型物流搬运小车的研发与调试过程中,发现基于CAN总线(CANopen)通信的直流伺服控制系统中会频繁出现一台或几台驱动器离线,使主控制器PLC失去对伺服驱动器的控制,从而导致小车运行故障。通过对CAN总线数据的监控,发现有大量错误帧。针对该问题用示波器对CAN总线的信号进行检测,发现CAN总线的电平信号受到严重干扰。类似的问题也会存在于逆变电源的CAN总线或其他工业总线的通信中。本文的主要目的就是找出此类设备干扰通信的根源,并给出具体的解决方案。
2 分析问题
根据示波器中显示的CAN总线信号幅值偏低,且有大量毛刺的现象,初步判断是车体内的直流伺服驱动器和伺服电机工作时产生的干扰,导致了CAN总线的通信异常。
2.1 直流伺服系统中的通信干扰源
根据直流伺服驱动系统的工作原理[2],并结合图1所示的直流伺服系统原理框图,分析可得直流伺服驱动系统中的CAN通信干扰源主要来自三方面:(1)功率开关管以十几千赫兹频率导通和关断时产生的功率电压脉冲通过MOS管壳体与散热器间的分布电容产生的干扰;(2)伺服电机工作时在其中性点产生的共模电压通过定子线圈与电机外壳间的分布电容产生的干扰;(3)主电流回路的脉动电流对空间的电磁场辐射干扰。

图1 直流伺服系统原理框图
2.2 功率脉冲电压对CAN总线的干扰
功率半导体器件通断产生的功率电压斩波和伺服电机工作产生的时变共模电压,可统称为功率脉冲电压,其主要特点是具有很大的du/dt。功率脉冲电压主要通过分布电容耦合产生干扰,干扰可分为两种情况,一种是散热器和电机外壳可靠接地,此时经分布电容耦合产生的共模电流流入大地,加重传导EMI;另一种就是本例的情况,散热器和电机外壳悬浮,共模电流最终通过复杂的分布参数回到电源负极[3]。当CAN总线系统与伺服系统电气隔离时,本例的共模电流的流通路径可简化为图2所示。

图2 简化共模电流路径图
共模电流经简化路径分布电容Cg、散热器、Cl1、CAN_L电缆、Cl2和Cg、散热器、Ch1、CAN_L电缆、Ch2回流锂电池负极。当CAN总线系统与伺服系统电气不隔离时,共模电流也可通过CAN通信电缆与锂电池负极的阻抗流入锂电池负极,所以CAN总线系统的电气隔离也有助于减小共模干扰。根据平板电容的计算公式C=εS/4πkd,可以定性分析本例中影响共模干扰电流的主要因数,如散热器的面积影响分布电容的有效极板面积,散热器与通信电缆的相对位置及通信电缆与整个锂电池负极的相对位置影响极板间距,所以合理的布局可以有效减小耦合电容的容量,进而减小穿透耦合电容的共模电流的大小。
3 解决问题
根据以上分析,本例中对CAN通信的干扰源主要是直流伺服驱动系统产生的共模干扰和空间电磁场的辐射干扰。从电磁干扰三要素角度来看,本例只能从阻断耦合路径和增加敏感回路的抗干扰能力出发来解决CAN总线的干扰问题。
3.1 阻隔共模电流的耦合路径
(1)减小散热器的面积。本例中金属车体与散热器、电机外壳有直接的电气连接,相当于散热器的面积增大,干扰也随之增大。将车体与散热器、电机外壳的电气连接断开,可减小干扰。但从车体的结构及机械强度方面来考虑,这种方法基本不能实现。
(2)采用屏蔽电缆。屏蔽电缆的屏蔽层接锂电池负极,可阻断共模电流的耦合路径。此时共模电流经Cg、散热器、Cs的路径直接到锂电池负极,从而不需要经过通信电缆去干扰CAN总线的通信。采用屏蔽电缆时共模电流路径如图3所示。
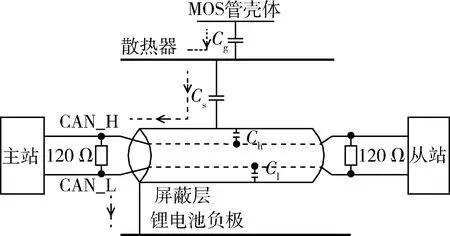
图3 采用屏蔽电缆时共模电流路径图
3.2 增强敏感回路抗干扰能力
(1)在CAN总线上增加高频抗干扰磁环,形成共模扼流圈抑制共模干扰[4]。
(2)采用双绞线,利用双绞线的扭曲特性,使相邻环内的感应电动势相互抵消,增强总线的抗磁场干扰能力[5]。
经测试,采用以上措施有效地抑制了CAN总线上的干扰,CAN总线上的错误帧数几乎减少为零,保证了系统中各个伺服系统的正常工作。
4 结论
以上对直流伺服系统中CAN总线干扰的原因分析,从一定程度上也代表了基于逆变原理的电力电子设备对CAN总线的干扰机理,尤其是散热器悬浮的情况。通过以上解决方案,解决了CAN总线被干扰的问题,保证了整个系统安全、可靠、高效地运行。
[1] BOSCH.CAN Specification Version 2.0[Z].1991.
[2] 余伟.永磁交流驱动系统共模干扰预测及抑制技术的研究[D].南京:南京航空航天大学,2014.
[3] 陈渭红.逆变器电磁干扰及其干扰模型研究[D].西安:西安理工大学,2007.
[4] 杨德勇,闵建军,范祝霞,等.变流器传导干扰分析与磁环抑制作用研究[J].大功率变流技术,2014(6): 33-39.
[5] 李玉龙,王丽芳,廖承林,等.屏蔽层对CAN总线抗干扰能力影响的研究[J].汽车技术,2009(10): 30-33.
Study on interference of CAN bus in DC servo system
Zhao Yabin ,Luo Liwen
(School of Electronic Information& Electrical Engineering,Shanghai Jiao Tong University,Shanghai 200240, China)
Currently,the DC servo system and variable frequency drive power supply are widely used.These devices are usually equipped with industrial field bus communication such as CAN bus to implement remote control.But the interference coming from the power switches when these devices are working often makes the fieldbus communication failed.In this paper,the interference mechanism,the potential interference sources and coupling paths are analyzed thoroughly.Furthermore,the solutions to this kind of communication problem are proposed from two aspects: cutting the coupling paths and improving the anti-interference ability of the interfered object.
servo drive; CAN bus; interference; common mode current
TM92
A DOI:10.19358/j.issn.1674-7720.2016.19.001
赵亚斌 ,罗利文.直流伺服系统中CAN总线的干扰问题研究[J].微型机与应用,2016,35(19):7-8.
2016-06-12)
赵亚斌(1986-),男,硕士研究生,工程师,主要研究方向:嵌入式系统,四向穿梭车研究与设计。
罗利文(1968-),通信作者,男,博士,副教授,硕士研究生导师,主要研究方向:光伏发电及并网技术,嵌入式系统。E-mail:lwluo@sjtu.edu.cn。
