分布式驱动电动汽车操纵稳定性控制评价体系
2016-11-15余卓平肖振宇王竑博
余卓平,肖振宇,冷 搏,王竑博,熊 璐
(1.同济大学中德学院,上海200092;2.同济大学汽车学院,上海201804)
分布式驱动电动汽车操纵稳定性控制评价体系
余卓平1,2,肖振宇1,冷 搏2,王竑博2,熊 璐2
(1.同济大学中德学院,上海200092;2.同济大学汽车学院,上海201804)
基于分布式驱动电动车动力学控制系统的特点,设计了一套客观评价体系,用于评价分布式驱动电动车动力学控制系统的性能。评价体系包括性能评价项目、评价方法和评分准则3个方面。性能评价项目涵盖整车层面和动力学控制系统层面。利用提出的评价体系对搭载动力学控制的车辆进行了操纵稳定性试验评价,验证了评价体系的合理性和可行性。
操纵稳定性;评价体系;车辆动力学控制;分布式驱动电动汽车
分布式驱动电动车具有各轮独立驱动且驱动力矩可控等特点,其动力学控制方法一直是各大企业及高校研究的焦点[1]。操纵稳定性控制方法对于改善整车性能具有十分重要的作用。为了分析控制效果,优化、标定控制参数,操纵稳定性控制评价成为汽车动力学控制研究中主要研究内容之一。目前,汽车设计最终的评价、调校多基于主观评价[2],控制效果的优劣难以定量描述;因此,长期以来,车辆研发人员致力于设计合理的能够对车辆性能定量描述的指标,实现对操纵稳定性控制的定量评价[3]。
在操纵稳定性控制评价方面,Crolla教授在进行主客观一致性研究中使用的评价项目设置方式、对比评价方法、数据统计处理方法等被广为借鉴[4]。文献[5]从制动稳定性和制动效能对配备制动防抱死系统(ABS)性能进行评价,并提出车辆ABS制动稳定性能评价指标,如侧偏力与纵向力的比值,控制能量,车轮侧偏角,车轮滑移率等,但文献并没有对相关指标的评价设置对应的试验工况。文献[6]建立了一套驱动防滑控制(ASR)算法的评价体系,文章从驱动效率、算法鲁棒性和执行器控制能量等方面对ASR控制算法进行评价。文献[7]也通过试验分析对比了有无驱动防滑算法介入时车辆的加速性能和附着系数利用率。文献[8]详细分析装备电子稳定程序(ESP)的车辆性能,发现正弦停滞试验能够验证ESP系统对车辆过多转向趋势的干预效果。文献[9]设计双移线工况、蛇行行驶工况、圆周试验工况和变路面附着系数工况,研究基于驾驶员操纵行为分析的极限工况下ESP系统性能评价。文献[10]以车辆操纵稳定性评价指标为研究对象,利用多元统计方法分析各指标变量间的依赖关系,构造少数几个操稳性综合评价指标,通过对各项指标加权求和的方式计算操纵稳定性能得分,但其评价体系的合理性和可行性缺少试验验证。
在前期动力学控制评价研究中,大都针对动力学控制系统某一方面的性能,或针对车辆本身性能。分布式驱动电动汽车由于装配冗余执行器,且各车轮力矩可以快速而精确地独立控制,其操纵稳定性控制可以同时实现操纵性改善控制、车辆稳定性控制、车轮滑移率控制等多个控制功能;因此,需针对分布式驱动电动汽车操纵稳定性控制系统建立客观的综合评价体系。文章旨在参考国内外相关车辆技术法规、标准和动力学控制系统评价方法,针对分布式驱动电动汽车操纵稳定性能建立一套较为全面的动力学控制系统客观评价体系;并对搭载动力学控制系统和无控制的分布式驱动电动汽车进行试验评价,验证评价体系合理性和可行性。
1 动力学控制系统评价体系
1.1 评价项目
从整车层面、动力学控制系统层面建立分布式驱动电动车动力学控制系统的性能评价项目。
1.1.1 整车评价项目
从整车的角度出发,设置直线加速性能、弯道加速性能、直线制动性能、弯道制动性能、中心区操纵性、直线行驶俯仰特性、直线行驶方向稳定性、转向性、弯道行驶方向保持特性、弯道行驶动态稳定性、弯道过多/不足失稳特性等性能评价项目。
1.1.2 动力学控制系统评价项目
操纵稳定性控制根据控制对象可以分为车轮动力学控制和整车动力学控制。对于采用模型跟踪控制的车轮滑移率控制和横摆运动跟踪控制可采用控制精度指标对跟踪效果进行评价。考虑到模型参数的不确定性、估计参数误差等对控制效果的影响,需对其控制鲁棒性进行评价。控制效果与执行器能耗在控制系统设计过程中是一对矛盾的指标,在对控制精度评价的同时需要对控制能量也进行评价。对于实现相同功能的不同系统,其复杂程度不同,运行效率不同,在实际运用中,控制系统的实时性非常重要,所以需对其实时性进行评价。
1.2 评价体系
根据1.1节设计的性能评价项目,参考现有的标准对车辆性能指标评价方法的规定,对各个评价项目设计如表1所示的评价体系。评价体系包括评价工况和性能参数两部分。
表1评价体系中直线制动性能、转向性能、中心区操纵性能和弯道行驶动态稳定性在现行标准[11-13]都有比较完善的评价方法;其他性能指标作者根据动力学控制特点和现行标准的不足做了补充和修正工作[14]。
1.3 评分准则
评分准则用于量化描述动力学控制系统本身以及对车辆性能的改善程度。评分采用百分制,以无控制车辆试验结果为基准,记无控制车辆得分为60分,设计如式(1)所示的评分方法计算有控制车辆得分,得分越高性能越好。以直线加速性能评价中的平均纵向加速度指标评分为例:

式中:a60为无控制车辆平均纵向加速度;a为待评价动力学控制系统作用下车辆平均纵向加速度;Ja为平均纵向加速度评价得分。
由于每种性能评价项目都是在其对应的多个工况下进行分析评价,所以每个性能评价项目的评分值都应该是多个试验工况的综合,即

式中:Ja为其对应的性能参数评价计分值;Jei为在每个具体工况下的评价计分值;wei为各个工况间的权重系数;n为评价工况数。文章中同一个性能评价项目所对应的各个工况是同等重要的。
在对车辆性能进行评价时,一般具有一个或几个工况,每个工况中对应一个或多个性能参数,所以对于车辆性能在某个试验工况中的评价计分值为其对应的性能参数评分值的综合。

式中:Jp为性能评价项目评价计分值;wbi为同一性能指标对应的各性能参数间的权重系数;n为评价性能参数总数。文章中认为同一个性能指标对应的多个性能参数是同等重要的。

表1 动力学控制系统评价体系Tab.1 Evaluation system

续表1
2 实车试验分析
2.1 试验平台与测量系统
采用分布式驱动电动车作为试验平台。该试验平台采用麦弗逊式前悬架,扭转梁式后悬架;前轴为盘式制动,由两个轮边电机驱动,装备有6.2减速比的轮边减速器;后轴为鼓式制动,由两个轮毂电机驱动。整车及电机主要参数如表2所示。车辆状态信息以及方向盘转角、转矩信息分别由GPS惯性导航仪和测力方向盘获得。
搭载的动力学控制算法为课题组提出的带自校正LQR功能的稳定性控制算法[15]。

表2 整车及电机主要参数Tab.2 Main parameters of the vehicle and motor
2.2 实车试验及结果分析
2.2.1 连续过弯稳定性
以45 km·h-1的初始车速进入蛇行工况,在进入工况之后松开油门,桩距12 m,试验结果如图1所示。

图1 蛇行工况连续过弯稳定性试验结果Fig.1 Slalom test results
由图1可知,在有控制介入的情况下,横摆角速度、质心侧偏角、侧向加速度的波动相对较小。此处采用相同初始车速情况下的速度损失来衡量完成工况的通过车速,速度损失越小,通过车速越高,车辆弯道行驶动态稳定性越好,评分结果如表3所示。

表3 蛇行工况弯道行驶动态稳定性评分结果Tab.3 Slalom test marking results
2.2.2 转向回正试验
驾驶车辆绕着15 m半径的圆周行驶,调整车速使侧向加速度达到6 m·s-2,待方向和速度稳定后开始记录并释放方向盘,记录时间内尽量保证车速一致,试验结果如图2所示。
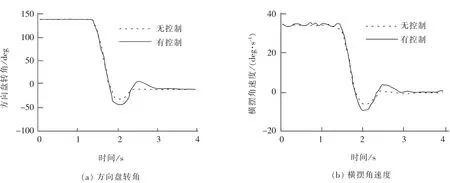
图2 转向回正试验结果Fig.2 Steering returnability test results
在当前工况下,有控制时,由于控制算法缺少回正工况判别和控制,车身恢复稳定的时间要比无控制时稍长,横摆角速度、方向盘转角波动相比无控制时较大;而残留横摆角速度与无控制时一样,均为0;评分结果如表4所示。
2.2.3 稳态圆周试验
采用100 deg的定方向盘转角进行稳态圆周试验,在试验开始前以15 km·h-1的最低稳定车速行驶并缓慢增加车速至侧向加速度5 m·s-2左右,记录试验数据,评分结果见表5。
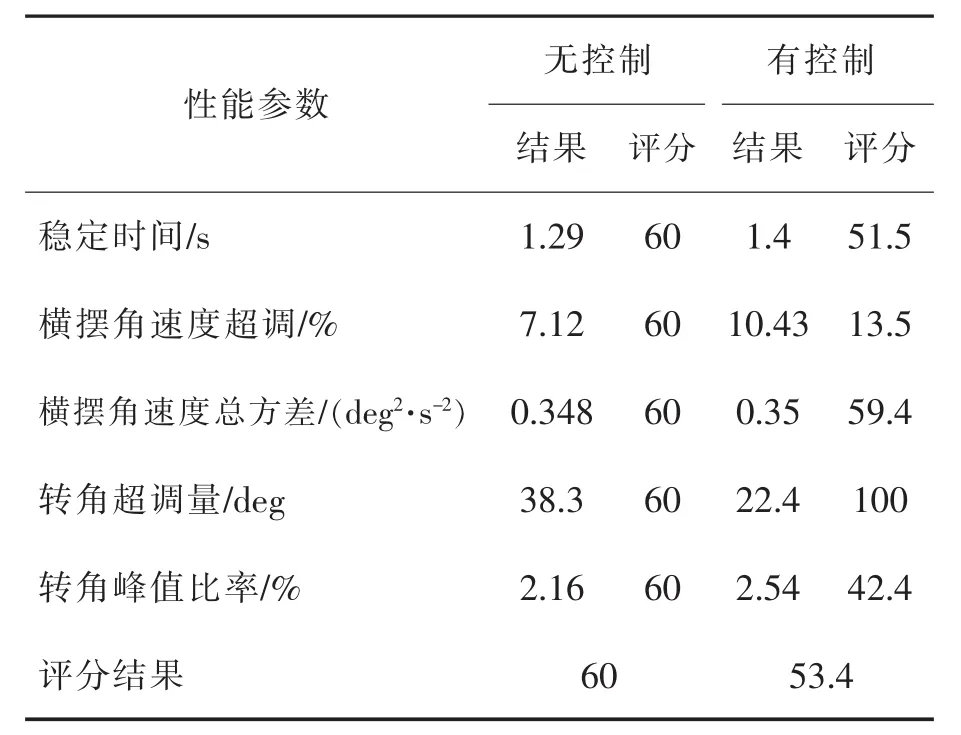
表4 转向回正试验评分结果Tab.4 Steering returnability test marking results

表5 稳态圆周试验评分结果Tab.5 Steady circular test marking results
由于侧向加速度较低,横摆角速度和质心侧偏角均没有超过安全阈值,稳定性控制算法几乎没有介入,所以有无控制评分结果几乎相同。
3 结论与展望
在基于对现行车辆性能评价标准的分析基础上,根据分布式驱动电动车动力学控制系统的性能特点,参考当前各大企业、各国标准及文献中对车辆及动力学控制系统的评价方法,分别从整车层面、动力学控制系统层面设计了分布式驱动电动车动力学控制系统性能评价项目。最后根据所建立的分布式驱动电动车动力学控制系统客观评价体系,结合当前试验条件,对本课题组所设计的稳定性控制算法的部分评价项目进行试验评价,同时验证了评价体系的可行性。
在对动力学控制系统的试验分析中,由于试验条件的限制,仅选择了部分试验工况,并且在试验中或多或少存在着一定的人为误差。在后期可以考虑完善相关的试验条件,以期对动力学控制系统进行更为全面的分析和评价。
[1]刘秋生,徐延海,万涛.电动轮汽车稳定性滑模控制研究[J].华东交通大学学报,2016,33(1):114-120.
[2]白艳,贾鑫,宗长富,等.汽车操纵稳定性客观评价方法综述[J].科学技术与工程,2012,12(6):1339-1347.
[3]HARI K M,SREERAJ N,BHASKAR C,et al.Establishing correlation between torsional and lateral stiffness parameters of BIW and vehicle handling performance[J].SAE Int J Passeng.Cars-mech Syst,2011,4(1):22-31.
[4]CHEN DC,CROLLA DA,ALSTEAD CJ,et al.A comprehensive study kf subjective and objective vehicle handling behaviour[J]. Dynamics of Vehicles on Roads&on Tracks Iavsd Symposium,1996,25(1):66-86.
[5]王元山,张小龙.汽车道路试验检测技术研究进展[J].轻型汽车技术,2007(4):4-9.
[6]何悠阳.分布式驱动电动汽车驱动防滑算法设计与评价分析[D].上海:同济大学,2014:26-48.
[7]杜志强,陈慧.四轮独立驱动电动汽车驱动防滑实车试验[J].湖北汽车工业学院学报,2008,22(1):1-6.
[8]李向瑜,高振海,郭健,等.汽车装备电子稳定性程序后的性能评价方法[J].拖拉机与农用运输车,2008(4):1-3.
[9]郭健.汽车稳定性控制系统控制策略与评价方法研究[D].长春:吉林大学,2011:108-119.
[10]王彦会,郭孔辉,卢炳武,等.基于多元统计分析的车辆操纵稳定性客观评价[J].吉林大学学报:工学版,2011(S2):6-11.
[11]中华人民共和国国家质量监督检查检疫总局,中国国家标准化管理委员会.GB/T6323-2014汽车操纵稳定性试验方法[S].北京:中国标准出版社,2014.
[12]BRITISH STANDANDS INSTITUTION.ISO 9815-2003 Road vehicles-passenger-car and trailer combinations-Lateral stability test[S].London:British Standards Institution,2003.
[13]BRITISH STANDARDS INSTITUTION.ISO 4138-1996,Passenger cars-steady-state circular driving behavior-open-loop test procedure[S].London:British Standards Institution,1996.
[14]王竑博.分布式驱动电动车动力学控制系统试验分析[D].上海:同济大学,2016:33-50.
[15]XIONG L,YU Z,WANG Y,et al.Vehicle dynamics control of four in-wheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation[J].Vehicle System Dynamics,2012,50(6):1-16.
Control Evaluation System Testing of Distributed Drive Electric Vehicle Handling Stability
Yu Zhuoping1,2,Xiao Zhenyu1,Leng Bo2,Wang Hongbo2,Xiong Lu2
(1.Sino-German School for Graduate Studies,Tongji University,Shanghai 200092,China;2.School of Automotive Studies,Tongji University,Shanghai 201804,China)
Based on features of distributed drive electric vehicle dynamic control system,an objective evaluation system for dynamic control systems of distributed drive electric vehicles was established.The evaluation system consists of performance evaluation parameters,evaluation methods and marking criteria.Performance evaluation was conducted in aspects of the vehicle and the dynamics control.Vehicle handling stability tests were carried out to assess a vehicle stability controller with the proposed evaluation system and to verify rationality and feasibility of the evaluation system itself.
handling stability performance;evaluation system;vehicle dynamic control;distributed drive electric vehicle
U461;U467.1
A
1005-0523(2016)05-0025-08
(责任编辑 刘棉玲)
2016-06-12
国家科技支撑计划项目(2015BAG17B01);国家自然科学基金项目(U1564207)
余卓平(1960—),男,教授,博士生导师,博士,研究方向为汽车动力学控制。
肖振宇(1991—),男,硕士研究生,研究方向为汽车动力学控制。
