海上风电打桩船运动响应分析*
2016-11-14吴卫国李旭坤
甘 进 吴卫国 李旭坤 王 旭
(武汉理工大学交通学院 武汉 430070)
海上风电打桩船运动响应分析*
甘 进 吴卫国 李旭坤 王 旭
(武汉理工大学交通学院 武汉 430070)
针对双体打桩船在海上打桩施工中的安全性问题,建立了打桩施工过程中风浪流作用下施工船及锚链的耦合系统数值分析模型,通过计算得到了频域及时域下船体的运动响应.根据对施工环境条件及打桩垂直度要求,计算了打桩船多种施工工况下的运动响应,并对双体打桩船施工安全性进行了评价.
海上风电;打桩船;垂直度;运动响应;数值计算;AQWA
0 引 言
风力发电是近年来世界各国普遍关注的可再生能源开发项目之一,发展速度非常快.1997~2004年,全球风电装机容量年均增长率达26.1%.目前全球风电装机容量已达5 000万kW,相当于47座标准核电站.经过连续多年的高速增长,我国风电装机容量已居世界第1位[1].目前我国正在大力推动海上风电发展,将从以陆上风电开发为主向陆上和海上风电全面开发转变,目标是成为海上风电大国.
满足为海上风电施工的不同需求,国家及各类涉风电公司研发和建造了多型用于海洋风电施工安装的先进装备[2].其中风电安装打桩船作为大型海上施工船舶,其安全性备受关注.传统的打桩作业流程为:(1)钢管桩浮运到指定施工地点;(2)钢管桩立管作业以及打定位桩,构建临时施工平台,保证桩体的垂直度;(3)在施工平台上进行打桩作业.采用双体船进行打桩相比传统打桩方法而言,其省去了打定位桩以及搭建施工平台的步骤,缩减了施工周期与成本.与普通单体打桩船相比,双体打桩船具有较好的稳性和操纵性,能较好的保证桩体的垂直度要求.海上打桩施工规范要求,打桩船施工期间桩体的垂直度偏差不得超过0.3%.桩体的垂直度主要受到船体运动的影响,如果打桩船在波浪中的运动响应过大,则不能进行正常打桩施工.在何种海况条件下可以进行施工作业,需要进一步计算.双体船在波浪中的运动响应的计算原理与普通的单体船计算原理是一样的,都是基于势流理论求解规则波下船舶六自由度的幅值响应算子RAO,再通过线性系统的分析方法以及频率特性得到脉冲响应函数并进行傅里叶变换,就可以得到船舶在规则或者不规则波下的时域运动响应.当前,国内外学者大多采用这种方法开展船舶波浪运动响应的研究.祁祺等[3]利用AQWA对FPSO系泊系统运动响应进行了数值模拟,给出各自由度方向上的一、二阶的运动响应结果, 通过对比分析得到了较为合理的系泊方式,为工程应用提供了参考依据.陈鹏等[4]计算了半潜式平台水动力性能及系泊性能的计算分析,发现当环境力方向在60°附近时,平台的系泊缆绳张力和水平偏移最大,需要在系泊方案设计中引起重视.Lee等[5]基于脉冲响应函数理论,创建局部非线性切片理论,计算了双体船迎浪与随浪状态下的波浪动载荷,并与模型试验做了对比.
文中以海上风电安装打桩船“华尔辰”号为研究对象,建立了船体和锚泊耦合系统模型,开展了耦合系统在不同波浪条件下的运动响应分析,以满足规范为前提,确定了可施工的海况,为海上施工的顺利开展提供了决策依据.
1 打桩船数值分析模型
双体打桩船“华尔辰”号的船舶主尺度见表1,根据打桩船的型线图、总布置图等资料建立双体打桩船几何模型,离散为面元模型,见图1.AQWA基于势流理论和三维二阶辐射/绕射切片理论计算水动力学系数[6].施工中所受环境力参数见表2.
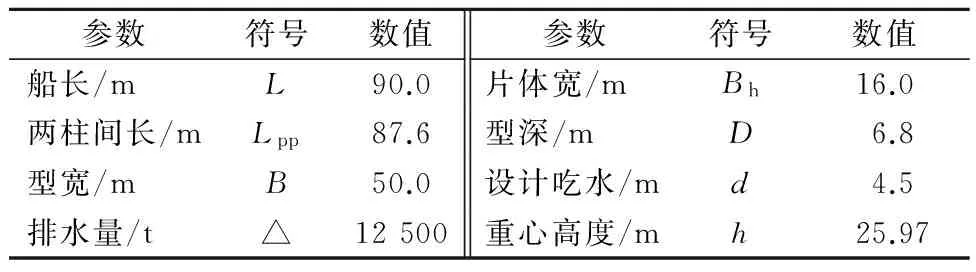
表1 双体打桩船“华尔辰”号主尺参数
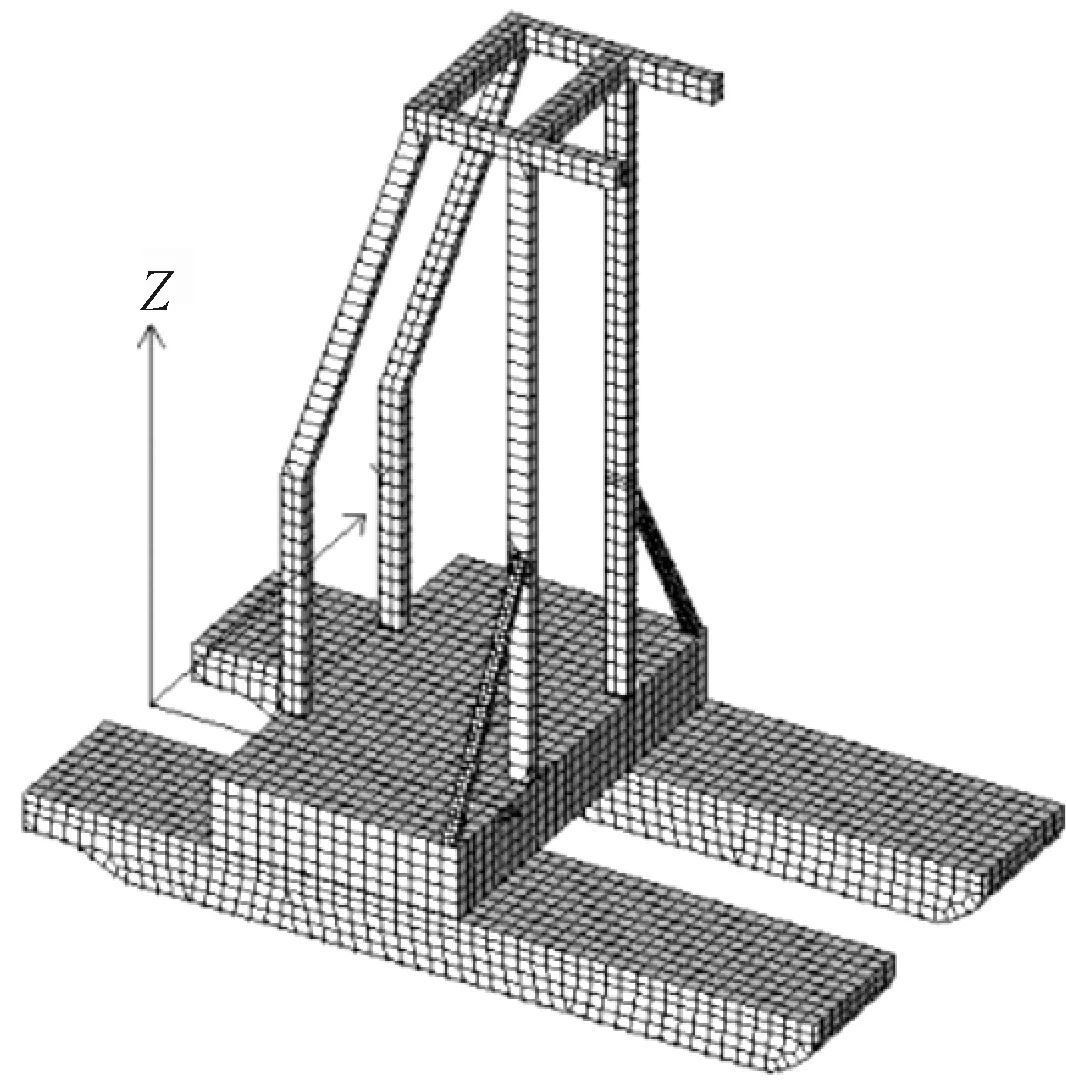
图1 打桩船网格划分

参数数值波浪有义波高H1/3/m谱峰周期Tp/s角度/(°)0.843.490,90,180风速度/(m·s-1)风谱角度/(°)6Ochi&shin0,-90,-180流速度/(m·s-1)角度/(°)0.50,90,180
系泊缆绳的布置形式,见图2.系泊缆绳由锚链和锚绳构成,参数见表3.
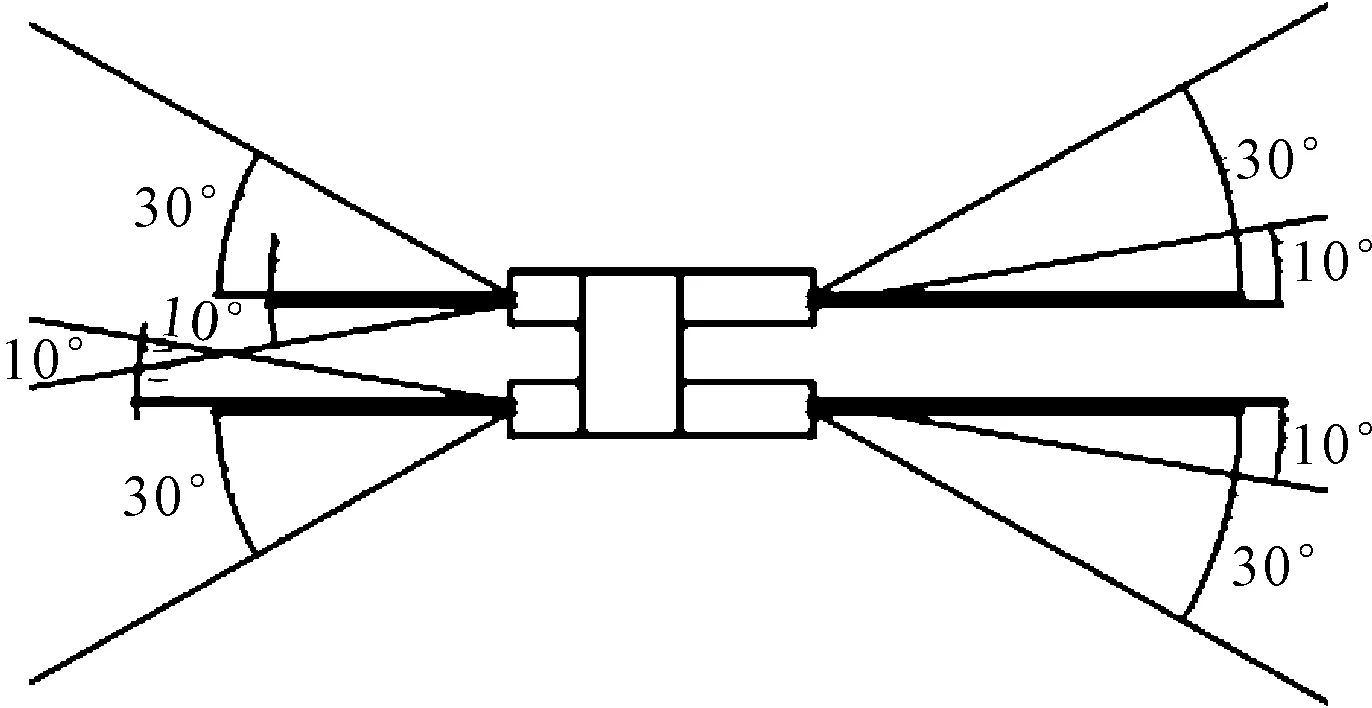
图2 系泊锚链的水平布置示意图
频域下幅值响应算子的计算因受网格限制和实际工程的需要,取0°~180°间7个浪向角,即每隔30°取一个浪向角,频率取0.1~0.294 Hz中的20个进行计算.
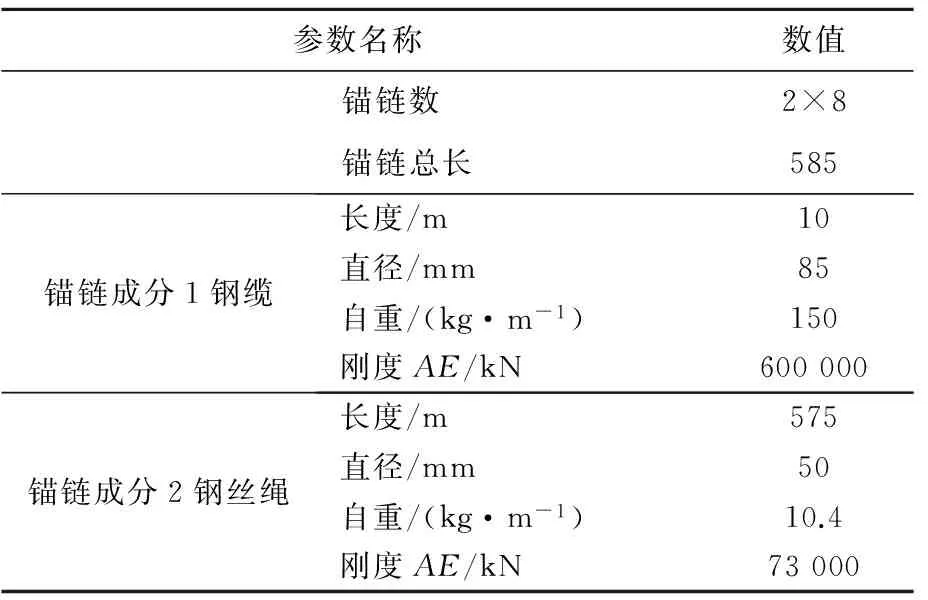
表3 系泊系统参数
2 运动响应频域分析
海上风电施工中桩体的垂直度是保证海上风机基础施工质量的重点,故将影响打桩垂直度最敏感的船体纵摇与横摇响应作为计算分析对象.打桩船运动响应频域分析结果见图3.
由图3a)可知,由于浪向角和船都是对称的缘故,计算得到的运动响应也基本呈对称分布,在波浪横向入射,即入射角为90°时,出现横摇响应的峰值,且频率为0.068 Hz(圆频率0.43 rad/s),根据微幅波理论
(1)
极浅水情况下有
(2)
(3)
此时波长约为137.3 m,为低频情况下需避免的海况.入射波角度为90°为响应出现最大的位置也是合理的.由图3b)可知对于纵摇响应,顺浪与斜浪的时候响应最明显,而横浪的响应相比就为小值,也是合理的.纵摇响应在0.068 Hz(圆频率0.43 rad/s)出现峰值,与横摇响应相同,在频率为0.128 Hz(圆频率0.804 rad/s)每一浪向均出现尖点,且相较峰值来说不小,甚至有浪向为最大,这样的海况也是要避免的.
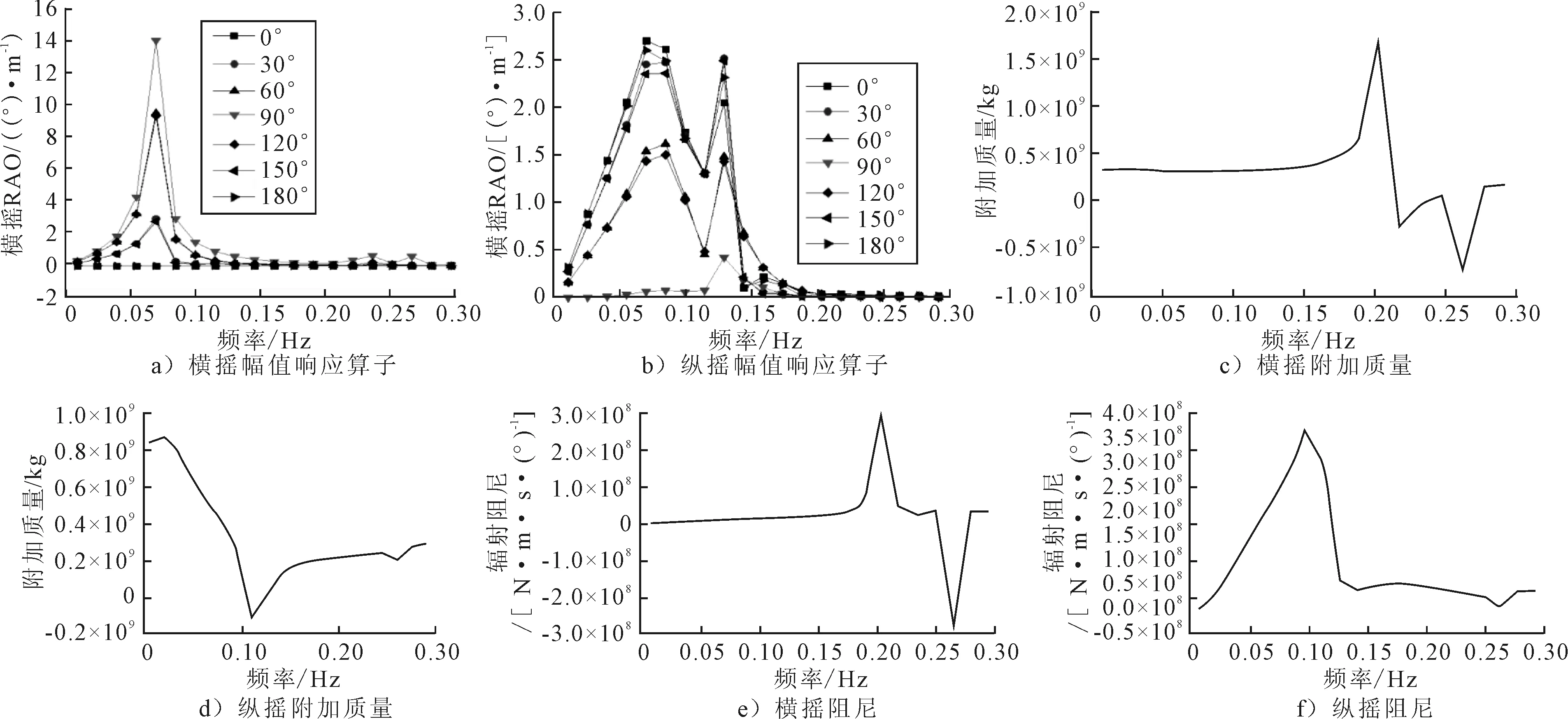
图3 打桩船运动响应频域分析结果
图3c)~f)提取的均是附加质量矩阵与阻尼系数矩阵的主对角线上的值,对于横摇与纵摇分别是A44,A55,B44,B55.在低频和高频段,纵摇的附加质量A55小于横摇附加质量A44,在中频段横摇附加质量增加,出现峰值于0.204 Hz(圆频率1.28 rad/s).对阻尼系数而言,低频段时,纵摇阻尼系数增长很快,之后又迅速下降,最后趋于一个较小的值,而横摇阻尼系数则一直很小,高频段有两个频率发生了突变,由于文中研究的是双体船,长宽比较小,横稳性好,纵摇时的阻尼系数与附加质量较横摇时大的并不多,也反映出双体打桩船在保持垂直度时的优势.再对比横摇与纵摇,横摇时的附加质量与辐射阻尼变化规律类似,附加质量要比辐射阻尼大得多.纵摇时,附加质量大体上是随着频率增大而呈先下降再增长的趋势,阻尼则正好相反.
3 运动响应时域分析
由于本船在施工中钢管桩是直立状态,重心很高,在波浪、流与风入射方向相反时,不论是对纵摇或是横摇都是最不利的情况,所以根据频域计算得出的结论,即0°与90°存在对垂直度影响最不利的部分,针对这2种工况进行时域的模拟.施工中允许的垂直度偏差为0.3%,即0.17°,在时域模拟中,横摇、纵摇角度的幅值不大于0.17°为评价标准.本节对3种环境载荷工况下船舶的运动响应进行了分析.图4~6分别为环境载荷工况I、II、III的运动响应计算结果.
环境载荷工况I时,见图4a),波流沿船艏向船艉方向入射,而风作用与波流相反,由图4b)和图4c)可知,纵摇的运动响应是远大于横摇的,幅值为0.051°,此时纵摇响应最大且纵摇幅值远小于0.17°,满足打桩垂直度的要求.
环境载荷工况II时,见图5a),风浪和流均沿船舶横向入射,且风和波流方向相反,此时为对横摇响应最为不利的工况,由图5b)~c)可知,横摇响应幅值为0.278°,是超过了要求的0.17°的施工要求,可见此种海况条件不利于施工要求和安全,应尽量避免.
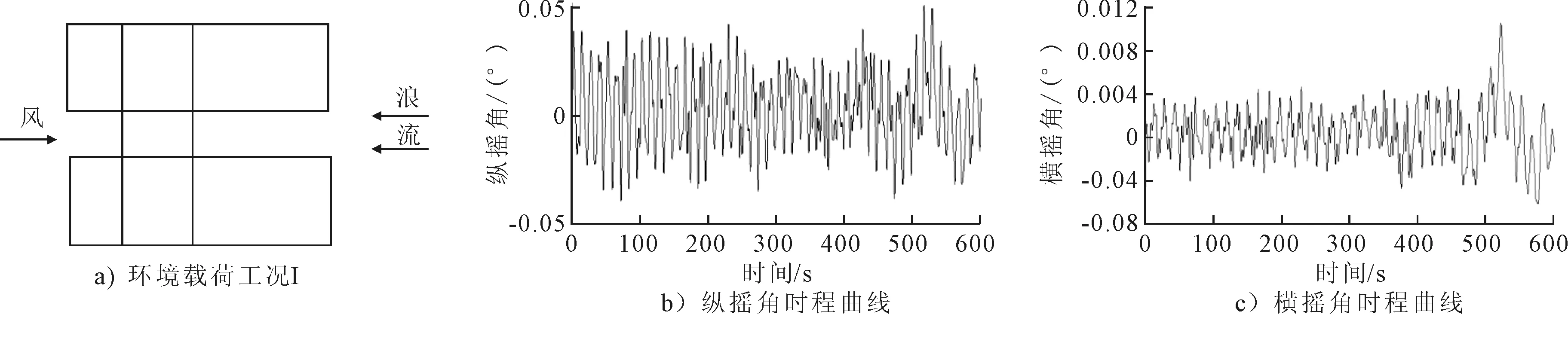
图4 环境载荷工况Ⅰ的运动响应计算结果
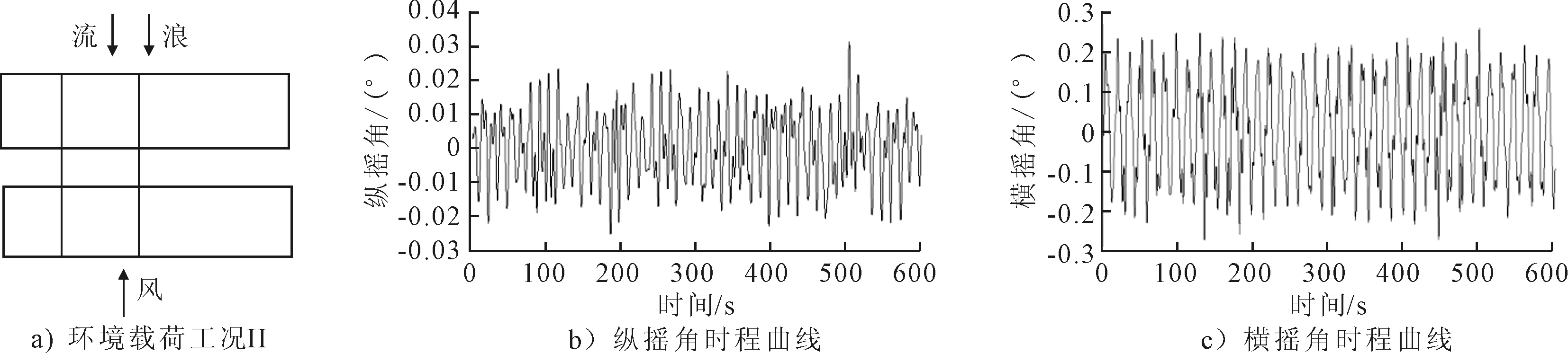
图5 环境载荷工况Ⅱ的运动响应计算结果
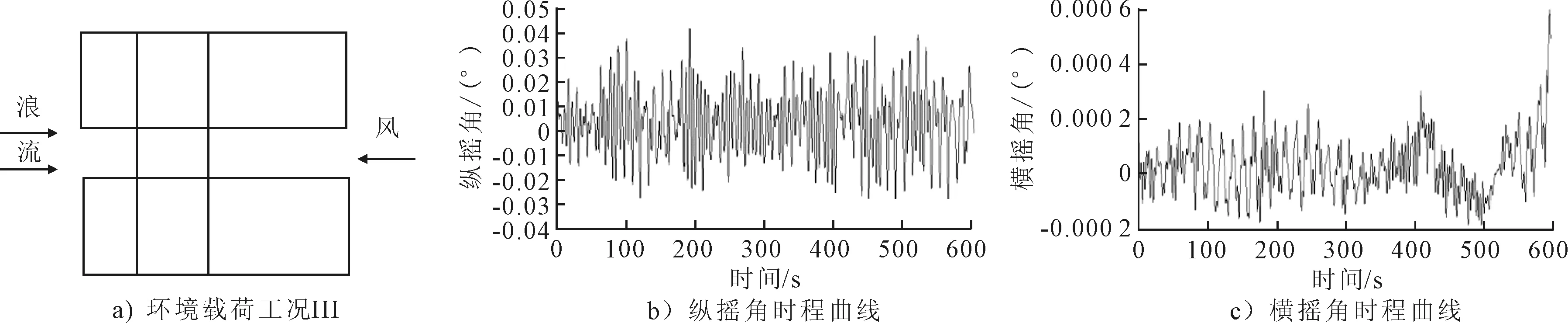
图6 环境载荷工况Ⅲ的运动响应计算结果
环境载荷工况III时,见图6a),该工况与环境载荷工况I类似,只是环境载荷作用的方向相反,此时仍然是纵摇不利的工况,最大纵摇角依然在安全的范围之内,而横摇响应则极小,可忽略不计.
4 结 论
1) 根据海上风电打桩船“华尔辰”号的实际情况,计算了在给定波浪条件下的该船的运动响应水平.根据计算结果可知,双体打桩船在布置时应尽量使船艏迎浪,避免波浪横向或斜向入射.并且在施工时,应尽量避开波长大,周期长的波浪条件进行施工作业.
2) 文中所采用的基于水动力软件分析AQWA的海上风电安装船运动响应数值分析方法,能用于评估海上风电施工方案的合理性和安全性;计算设计施工工况下的打桩垂直度以及分析恶劣工况下的打桩船运动响应等,为海上风电工程施工提供技术保障.
[1]刘林,葛旭波,张义斌,等.我国海上风电发展现状及分析[J].能源技术经济,2012,24(3):66-72.
[2]甘进,王旭,叶毅,等.一种海洋工程辅助施工装置:ZL201420701483.3[P].2015-04-08.
[3]祁祺,张涛,文攀,等.基于AQWA的FPSO系泊系统响应数值模拟[J].舰船科学技术,2011,33(12):14-18.
[4]陈鹏,马骏,黄进浩,等.基于AQWA的半潜式平台水动力分析及系泊性能计算分析[J].船海工程,2013,42(3):44-47.
[5]LEE C M, JONES H D, CURPHEY R M. Predication of motions and hydrodynamic loads of catama-arns[J].Marine Technology,1973,10(4):392-405.
[6]CHAN H S. Prediction of motion and wave loads of twin-hull ships[J].Marine Structures,1993(6):75-102.
Motion Response Analysis of Offshore Pile Driving Barge for Wind Power Construction
GAN Jin WU Weiguo LI Xukun WANG Xu
(SchoolofTransportation,WuhanUniversityofTechnology,Wuhan430070,China)
In view of the safety problems of pile driving catamaran in pile driving at sea, an analysis model is built to simulate the behaviors of the coupled system between hull and mooring under the condition of wind, wave and current. The motion responses in both frequency and time domains are obtained. According to the requirements of environmental conditions and piling perpendicular degree in construction, the values of motion responses for the pile driving catamaran are calculated under many kinds of working conditions, and the construction safety of the pile driving catamaran is evaluated.
offshore wind power; drilling barge; perpendicularity; motion response; numerical calculation; AQWA
2016-08-12
*国家自然科学基金项目(51409201)、中央高校基本科研业务费专项(2015-zy-025)资助
U674.32 doi:10.3963/j.issn.2095-3844.2016.05.014
甘进(1982- ):男,博士,讲师,主要研究领域为海洋工程结构安全可靠性