洞庭湖区重要一般垸治理工程中的无人机航线设计
2016-11-14刘业林易南洲
刘业林 易南洲
(湖南省水利水电勘测设计研究总院 长沙市 410007)
洞庭湖区重要一般垸治理工程中的无人机航线设计
刘业林易南洲
(湖南省水利水电勘测设计研究总院长沙市410007)
文章通过洞庭湖区水利工程实践,讨论了无人机航摄参数计算、航线设计的一些关键问题,总结了无人机在水利工程应用中航空摄影的一般方法。
无人机航线设计航摄参数计算
1 无人机航摄系统简介
无人驾驶飞行器(UnmannedAerialVehicle)简称为无人机(UAV),是一种由动力驱动、机上无人驾驶、可重复使用的航空器,具有无线电遥控或半自主、自主三种飞行控制方式[1]。无人机航摄系统是以无人机为平台,搭载影像传感器为任务设备,进行航空摄影作业的无人机系统。其系统基本构成:飞行平台、飞行控制与导航系统(飞控系统)、地面监控系统、任务设备、数据传输系统、发射与回收系统、地面保障设备、传感器。现阶段无人机航摄系统影像传感器,主要是数码相机、多拼CCD相机,少数为多波段传感器。
无人机具有体积小、重量轻、成本低、机动性好、飞行时间长等优点,空中飞行操作全过程在电子设备自动控制下进行,如今无人机航摄系统已经成为传统航空摄影测量手段的有力补充,其获得高分辨率影像数据可应用于多种领域,在小范围和飞行困难地区(传统航摄平台)高分辨率影像快速获取方面具有明显优势[2]。
2 无人机航摄系统的应用
2015年湖南省水利水电勘测设计研究总院引进某公司DM150型测绘无人机,成功地应用于洞庭湖区重要一般垸整治工程中,快速获取了洞庭湖区相应工程堤垸的高分辨率影像,并以此完成像控测量后用于数字线画图(DLG)生产,缩短了测绘产品生产时间,节省了测绘工期,产品质量满足设计需求。
(1)DM150型无人机主要技术参数(附表)。

附表 DM150型无人机主要技术参数
(2)DM150型无人机采用普洛特UP30型通用无人机自驾仪进行飞行控制,其主要参数:
集成3轴MEMS加速度计、速率陀螺、高灵敏度GPS,数字气压高度计,空速传感器;具有5种飞行模式:RC、RPV、UAV、CPV、CRPV;
100个飞行航路点,7种飞行制式,制式时间可设定;照片POS容量:2978。
(3)无人机的机体坐标系[3](图1):

图1 机体坐标系
飞机绕机体纵轴、机体立轴和机体横轴的转动,分别称为滚转(roll)、偏转(yaw)、俯仰转动(pitch)。飞行控制系统对飞机姿态控制,飞行质量评价,飞机POS数据等都要以飞机轴向为准,所以有必要明确飞机的坐标轴定义。
3 航摄参数的确定
(1)航摄相机SONYA7R像元大小的计算。

W、H是相机CMOS(或CCD)的宽度和高度,NW、NH为对应方向像元个数。
(2)相对航高H。与传统航摄作业参照摄影比例尺制定飞行航高略有区别,无人机低空航摄一般选用地面分辨率设计飞行航高,可参考规范5.2.1地面分辨率章节进行选择。
式中H——摄影航高(m);
f——镜头焦距(mm);
a——像元尺寸(mm);
GSD——地面分辨率(m)。
SONYA7R原装镜头是带OIS光学防抖功能镜头,无法精确定焦,故采用经专业公司定制改装的35mm定焦镜头,检定合格提交检定证书后投入使用。
洞庭湖区重要一般垸治理工程在可研阶段需要1∶2000比例尺带状地形图,航飞限制条件又和天气情况密切相关,而湖南本地区冬春季雨期长、下雨天气多、雾霾重,有风天气多、云层高度低,实际可实施航飞时间更少,在选择低分辨率GSD(15cm~20cm)多次航飞时无人机都进入云层,严重阻碍了航摄工作,所以综合考虑确保成图精度、缩短成图周期、降低成本和飞行气象条件后,一般GSD选用(10~12)cm,个别堤垸选用15cm。计算结果如下:
GSD=10cm时,H=717.2m;GSD=12cm时,H= 860.6cm;GSD=15cm时,H=1075.8m。
(3)航摄分区和航摄基准面选择。参考文献[5]航摄分区划分,合理的进行航摄分区。湖南洞庭湖区海拔低,地势平坦,工程可研各堤垸堤身内外相对高差小,一般(30~50)m即为较大高差,远小于规范[4]1/6相对航高的高差要求。在充分考虑实际堤垸堤线长度、无人机的航程、邻近区域气象因素等,通常将一个县、区划分为一个航摄分区,一般的设计一个飞行架次。
航摄分区基准面高程的计算:
式中h最高、h最低——分区内最高、最低高程。
(4)根据规范[4]7.1飞行质量要求和数据后期处理要求,合理的选定相片重叠度。无人机一般搭载的影像传感器是非量测型相机,其相片相幅小、云台相对简单,空中飞行姿态稳定性较大飞机差,飞行易受气流影响而航线偏转、俯仰、滚转,为保证航摄数据可用性,经洞庭湖工程航摄实践,航向重叠度P×一般选70%~80%,旁向重叠度qY一般选40%~50%。
4 摄影基线与航线间隔
式中LX、LY——相幅长度和宽度(mm);
bX——相片上摄影基线长度(mm);
dY——相片上航线间隔宽度(mm);
BX——实地上摄影基线长度(m);
DY——实地上航线间隔宽度(m)。
无人机航摄时照片拍照方式一般有三种:等时拍照、等距拍照、定点拍照。航飞时无人机空速因气流、气压、发动机等原因会发生变化,又空气气流运动复杂性,无人机地速是时刻变化的,所以一般不选择等时拍照,而是选择等距拍照。根据上式计算出BX、DY,绘制航线时输入以上参数。当采用DEM进行设计时,可采用定点拍照方式,减小相片冗余。
5 航线设计过程
(1)航线绘制采用“UP30系列无人机飞控系统地面站软件”进行,该软件基于Mapinfo公司MapX二次开发,功能强大,适合无人机监控及航线规划。根据重要一般垸的堤垸堤线成图范围,首先在GoogleEarth上用“路径”或“多边形”工具,将实际堤线或范围描绘出来。
(2)使用globalmapper软件导入堤线或工程范围,可根据需要进行缓冲分析、叠加分析等,并根据航摄需要添加一些辅助线辅助航线设计,数据处理后输出mapinfo格式(.TAB、.DAT、.MAP、.ID、.IND)文件,作为标志层电子底图在UP30地面站软件中使用。
(3)在UP30软件中导入标志层数据,新建航线层,确定起飞场地1点。在起飞场地尚未确定时或多个场地备选时,1点之后可根据实际情况修改。输入航线绝对航高(当海拔高度<3km时,气压高度使用地面绝对高度标定时)和航线间隔,使用航线设计工具绘制航线。
航线绘制一定要考虑相幅的覆盖度,在不利条件下,如无人机在风力影响下航偏、滚转,要保证满足规范的重叠度。洞庭湖区堤垸多为线状区域,无人机飞行时无可避免的要根据堤线走向转弯,航线绘制时要合理设计转弯、转出航线和转入航线,在保证无人机转弯半径的条件下进行航线连接,不出现航摄漏洞。航摄相幅X约(700~800)m(GSD=10cm时)以上,而实际成图需要为堤线两侧200m左右范围,所以一般将航线设计在堤线正上方,保证了传感器镜头正下方的影像变形最小。图2为某几个堤垸实际航线和航摄照片曝光POS点位图。
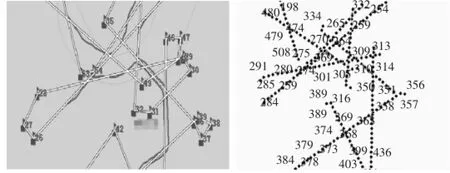
图2 某堤垸的实际航线及对应POS点位图(局部)
6 总 结
本文论述了无人机(固定翼)用于洞庭湖区水利工程航线设计的一般方法,通过实践证明了无人机航摄可以应用于水利工程可研等阶段,可缩短工期,降低生产成本,降低劳动强度,提高生产效率。但无人机航摄仍属于新兴技术,实用时以下多个方面需要注意:
(1)航线设计时必须充分研究相关规范,及相应工程的项目设计书、专业技术设计书,进行精度估算,以必要的精度进行。
(2)航线设计必须进行多人次独立检查,包括航摄参数计算、航线绘制等等,形成相应的检查、修改记录。航线绘制时应注意整个航线应闭合,航摄分区时应进行高程分析,保证无人机航线在最高点安全高度之上。考虑到可能出现的意外情况,航区毗连区域至起降场地也应进行高程分析,保证无人机能在紧急情况下安全召回。航摄时摄区边界应保证3条以上基线覆盖,避免边界区域无法形成立体像对。
(3)无人机航摄系统搭载传感器多为非量测相机,由于相机成本、机体结构、机身材料原因,相机稳定性较差,相机参数可能会随温度、湿度、气压等发生变化,所以有必要采取措施保护好相机,使其工作在理想环境下。水利工程的特殊性对高程精度要求较高,而航摄平面精度相对容易达到,故在像控点的布设时应当考虑到此情况,另可适当的引入部分外业实测高程点参与后期DLG成图。
(4)无人机飞行时通过气压高度计控制飞行高度,而航拍时又通过机载导航GPS控制拍照,虽然在起降场地通过GPS标定了气压高度,但航线高度可能与设计航高不一致,根据规范7.1.5航高保持,当差值超过规范要求时,需要对航高进行调整,此项一般在进入巡航拍摄前进行。
(5)无人机航摄作为一种航摄新技术,应积极发挥其优势,但用于航摄时一定要保证安全。航飞作业必须遵守《中华人民共和国飞行基本规定》及相关法律法规,按手续向军区司令部、当地部队、空管部门申请空域,获得批准后再实施航飞。航线设计应避免军事基地、民航机场等禁飞区和飞行管制区、管制分区,还应当避开民航飞机的降落盘旋航线空域。具体实施航飞前,还应当做好实地调查,
避免航飞时的无线电、磁干扰,尽量将潜在的危险因素降到最低。
[1]CH/Z3002-2010.无人机航摄系统技术要求[S].
[2]杨爱玲,孙汝岳,徐开明.基于固定翼无人机航摄影像获取及应用探讨[J].测绘与空间地理信息,2010,33(5):160-162.
[3]刘星,司海青,蔡中长.飞行原理[M].北京:科学出版社,2011.
[4]CH/Z3005-2010.低空数字航空摄影规范[S].
[5]朱肇光,孙护,崔炳光.摄影测量学[M].北京:测绘出版社,1995.
[6]SL197-2013.水利水电工程测量规范[S].
刘业林(1981-),男,宁夏石嘴山人,大学本科,测绘工程师,主要从事工程测量、航空摄影测量工作。
(2016-07-11)