对锅炉汽包水位控制方案的初步探讨
2016-11-14史志慧高鲁
史志慧,高鲁
(锡林郭勒职业学院,内蒙古 锡林浩特 026000)
对锅炉汽包水位控制方案的初步探讨
Preliminary study of boiler drum level control scheme
史志慧,高鲁
(锡林郭勒职业学院,内蒙古 锡林浩特 026000)
锅炉是工业发展过程中重要的热能动力设备,汽包水位作为锅炉重要的被控变量,对其进行自动控制十分必要。锅炉的水位调节过程具有很强的滞后性和波动性,因此应用复合调节方案对汽包水位调节更具实用性。在本文中主要以火电厂锅炉为背景,应用仿真软件,对汽包水位PID控制系统进行仿真,并对以上三种控制方案进行了比较。
锅炉汽包水位;PID控制系统;仿真实例分析
火电厂锅炉汽包水位控制目的是使给水流量与蒸汽流量相符合,维持锅炉汽包水位在额定范围内。汽包内水位过高,导致汽水分离效果变差,引起蒸汽内含盐量增高,蒸汽品质恶化;汽包水位过低,导致循环流动压头降低、汽水循环变差,严重时,还可能造成汽包干烧和水冷壁破裂等停机事故。因此,实现对锅炉水位的自动控制,可以提高电厂机组的安全性、经济性。
1 锅炉汽包水位PID控制器原理
PID控制器是比例(Proportional)控制单元、积分(Integrative)控制单元、微分(Derivative)控制单元三者组合的简称。
比例控制单元:主要显示输入与输出误差信号之间的比例关系,即:u=Kpe, Kp为比例系数, Kp直接影响系统的响应速度和精度。
积分控制单元:主要用于消除稳态误差,增大系统的无差度,即:Ti为积分时间常数,Ti直接影响积分作用的强弱。
微分控制单元:主要用于改善系统的动态特性,控制器的输出与输入误差信号的微分成正比关系,即:Td为微分时间常数,Td主要控制响应误差的超调现象。
2 锅炉汽包水位PID控制方案
2.1 单冲量控制系统
单冲量控制系统是汽包水位自动控制系统中最简单、最基本的方式,它将汽包水位测量信号经变送器送到水位控制系统中,水位控制器根据测量值与规定值的偏差调节给水阀门,通过改变给水流量使汽包水位保持在规定范围内。对于负荷变化较大的机组,单冲量控制系统不能适用。
2.2 双冲量控制系统
双冲量控制系统是以蒸汽流量信号作为前馈信号,以水位信号作为反馈信号的控制系统。引入蒸汽流量前馈信号后,当蒸汽流量改变时,该调节系统的调节器可以使蒸汽流量与给水流量同向变化,这样可以减少或抵消“虚假水位”现象引起的问题。但是这种控制系统要等汽包水位信号发生变化后才能动作,滞后时间长,水位波动大。
2.3 三冲量控制系统
三冲量控制系统是以汽包水位为主控制信号,蒸汽流量为前馈控制信号,给水流量为反馈控制信号组成的控制系统。从结构上来说,三冲量控制系统实质上是一个带前馈信号的串级控制系统。其中串级控制系统回路包括:由给水流量、给水变送器、调节器和调节阀组成的副控制回路;由汽包水位调节对象和副控制回路构成的主控制回路。蒸汽流量及其蒸汽变送器的引入并不影响主、副控制回路的稳定性,但是可以提高控制系统的控制品质。
3 锅炉汽包水位PID控制方案实例
3.1 锅炉汽包水位控制
本文所引用的是基于PID算法的MATLAB—SIMULINK仿真模型,在此控制系统中主、副控制器都设定为PID控制器。 PID 控制器的经验公式为:及、Ti=1.8τ、Td=0.5τ(其中k、t、K分别为对象模型的开环增益、纯滞后时间常数和惯性时间常数)整定三种不同控制方式的控制器参数。将主、副控制器封装入不同的控制系统中,有不同的控制结果。所用参数:Kp1∈(17-22)、Ki1∈(0.4-0.5)、Kd1∈(4.2-4.8)、Kp2∈(12-14)、Ki2∈(25-27)、Kd2∈(0.01-0.02);输入为阶跃信号。

图1 主控制器

图2 副控制器
3.2 级双冲量锅炉汽包水位控制系统仿真模型
主控制器(PID1)与蒸汽流量信号(前馈)、汽包水位信号(反馈)共同构成单级双冲量锅炉汽包水位控制系统。(图3、图4)
3.3 单级三冲量锅炉汽包水位控制系统仿真模型
主控制器(PID1)与蒸汽流量信号(前馈)、汽包水位信号(反馈)、给水流量信号(反馈)共同构成单级三冲量锅炉汽包水位控制系统(图5、图6)。
3.4 串级三冲量锅炉汽包水位控制系统仿真模型
主控制器(PID1),副控制器(PID2)与蒸汽流量信号(前馈)、汽包水位信号(反馈)、给水流量信号(反馈)共同构成串级三冲量锅炉汽包水位控制系统(图7、图8)。
3.5 结论
(1)从仿真响应曲线可以看出三种调节系统在相同阶跃输入的情况,如表1。
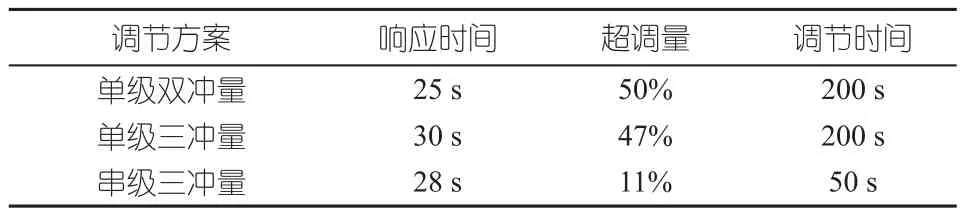
表1 三种调节系统在相同阶跃的输入情况
(2)单级三冲量振荡小于单级双冲量,调节时间短于单级三冲量;串级三冲量调节系统不仅超调量最小,响应快,振荡小,平稳性好,调节时间相对最短,稳态误差也最小。以上说明,串级三冲量调节系统为三种调节系统最优。

图3 单级双冲量控制系统结构图

图4 单级双冲量PID控制系统响应曲线

图5 单级三冲量控制系统结构图
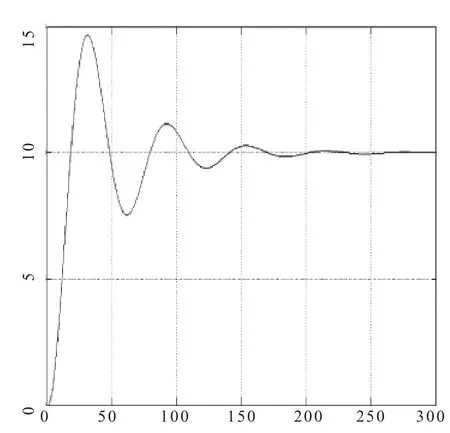
图6 单级三冲量控制PID系统响应曲线
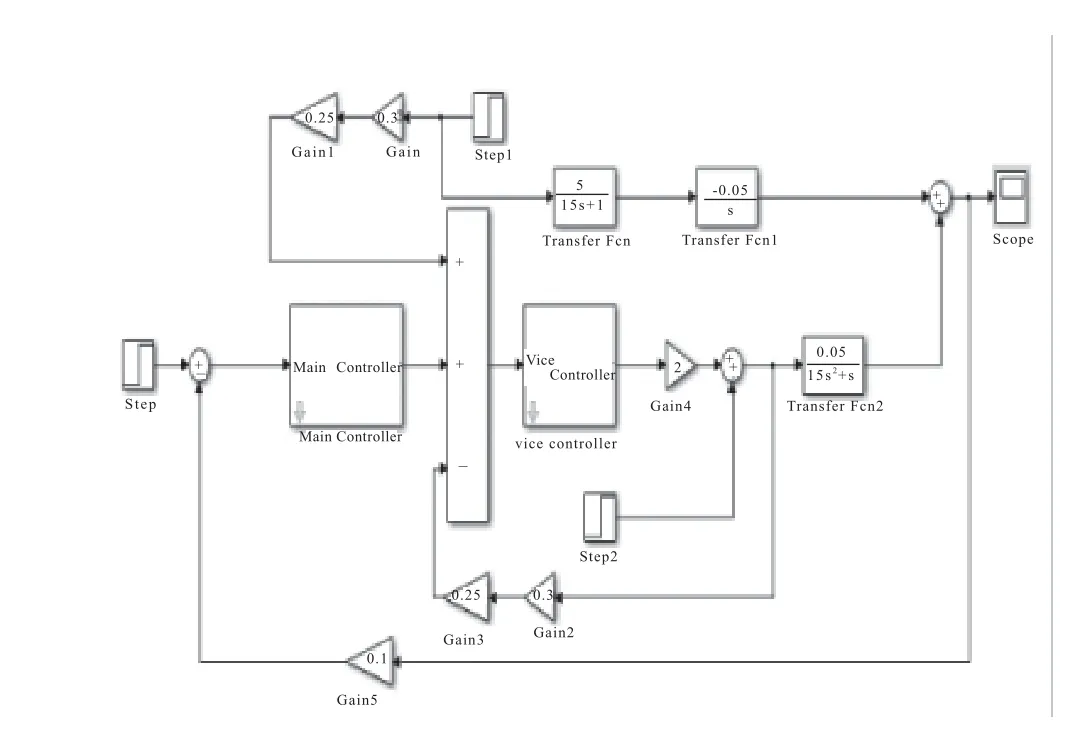
图7 串级三冲量控制系统结构图
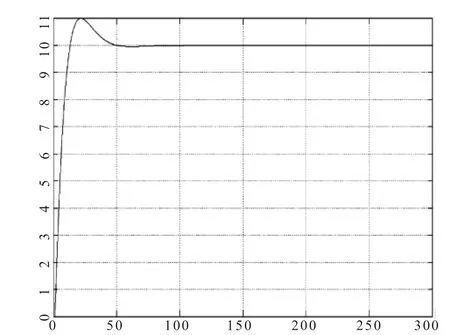
图8 串级三冲量PID控制系统响应曲线
[1]杨献勇. 热工过程自动控制[M]. 清华大学出版社,2000 年.
[2]孙优贤,孙红. 锅炉设备的自动调节[M]. 化学工业出版社,1982.5.
[3]陶永华. 主编新型PID控制及其应用[M]. 机械工业出版社,2002.
[4]陈平. 一种基于模糊PID控制的锅炉汽包水位控制方法. 福建工程学院学报,2006,4,83~84.
[5]刘金馄. 先进PID及其MATLAB仿真[M]. 北京:电子工业出版社,2003,49~82.
[6]王芳. 模糊自调整 PID 控制在锅炉汽包水位控制中的应用[D]. 2006,山东大学硕士学位论文,1~6.
[7]楼顺天,胡昌华. 基于MAI,LAB的系统分析与设计[M]. 西安:西安电子科技大学出版社,2001,12~57.
[8]吕广红. 基于模糊控制的锅炉汽包水位串级控制系统[J]. 自动化与仪表,2004,16(2):15~18.
[9]海山. 锅炉汽包水位的智能控制研究[D]. 内蒙古大学,2008,5:36~44.
(P-02)
日本和越南炼化开发出“无碳”橡胶
新近,日本和越南研究人员开发出出减少天然橡胶中蛋白质含量的新技术,可以生产高性能橡胶材料并且减少天然胶加工过程中的环境污染。该项目的目标是通过使用碳中和天然橡胶代替来源于石化资源的合成橡胶,降低二氧化碳排放。另外,此项目也开发出更加先进的橡胶加工厂水处理技术,有助于减少温室气体排放量,将甲烷恢复成可利用能源。此项目由河内科技大学、越南橡胶研究院、长冈技术科学大学共同开发,并得到日本国际协力机构与日本科学院的资金支持。
(燕丰供稿)
TK323
1009-797X(2016)04-0056-03
A
10.13520/j.cnki.rpte.2016.04.022
史志慧(1985-),女,助教,本科,研究方向为热能与动力工程及高等职业教育。
2016-01-06