基于光纤传输的无人值守远程数采实时监控系统
2016-11-14张雁霞渠红光王晶李海涛阮林波
张雁霞,渠红光,王晶,李海涛,阮林波
(西北核技术研究所,西安710024;强脉冲辐射环境模拟与效应国家重点实验,西安710024)
基于光纤传输的无人值守远程数采实时监控系统
张雁霞,渠红光,王晶,李海涛,阮林波
(西北核技术研究所,西安710024;强脉冲辐射环境模拟与效应国家重点实验,西安710024)
为检查强辐射环境下无人值守远程数采的工作状态,根据半导体激光二极管直接调制原理,设计了控制指令通过光纤传输的实时监控系统。该系统可同时产生幅度分散性小于0.5%、时间分散性小于50 ps的四路标准信号和四路触发信号,标准信号与触发信号时间间隔晃动小于1 ns,可同时对四通道无人值守远程数采的工作状态及数据传输链路进行实时检查。
实时监控;光纤传输;无人值守远程数采;激光二极管;间接耦合模式;分散性;
在强辐射、强电磁脉冲测试条件下,为使被测信号,尤其是高频信号不受限于传输介质,降低后续测试数据分析处理的复杂度,同时避免环境对测试设备及人员的影响,通常以无人值守远程数采作为有效测试途径之一,即将待测信号通过远程数采数字化后,由光纤将数据传至控制端[1]。为随时了解无人值守远程数采的状态,必须对其进行实时监控。由于控制端与远程端距离较远,其间有许多不确定因素,为避免这些不确定因素使无人值守远程数采产生误动作,实时监控系统的控制指令以衰减较小且具有较强抗电磁辐射能力的光纤[1]进行传输。实时监控系统必须同时提供具有一定时间间隔的触发信号和标准信号,其中,触发信号作为无人值守远程数采的零时刻,标准信号作为待测信号,根据监控数据判断无人值守远程数采的工作状态和数据传输链路的状态,计算放大衰减系数,并以此作为处理测试数据的参考。另外,由于待测信号数量较多,无人值守远程数采有多个通道,所以,实时监控系统还必须同时产生幅度分散性和时间分散性均较小的多路触发信号及多路标准信号。
本文设计的基于光纤传输的无人值守远程数采实时监控系统,通过抗干扰性较强的光纤传输控制信号,可同时产生幅度、时间特性较为一致的四路标准信号和四路触发信号,每路标准信号与每路触发信号具有一定时间间隔,可对四通道无人值守远程数采的工作状态及数据传输链路进行实时检查。
1系统构成
基于光纤传输的无人值守远程数采实时监控系统由控制指令发送模块、控制指令执行模块和传输光纤组成。其中,控制指令发送模块处于控制端,控制指令执行模块与无人值守远程数采端同处于远程端。系统原理如图1所示。控制指令发送模块由单次脉冲产生电路、去抖动电路、脉冲整形电路及电光转换电路组成;控制指令执行模块由光电转换电路、四路触发信号产生电路及四路标准信号产生电路组成。控制指令发送模块通过单次脉冲产生电路产生一个单次脉冲,即控制指令,并经去抖动电路、脉冲整形电路及电光转换电路转换成幅度、宽度一定的光信号。该信号由光纤传输至远程端的控制指令执行模块,由该模块中的光电转换电路解调出控制指令,再经缓冲后分为两路,一路经变换后产生四路触发信号,另一路经一定时间延迟后产生四路标准信号。触发信号启动无人值守远程数采,开始对标准信号进行采样,并由无人值守远程数采将监控数据传至控制端的数据存储区,由用户根据该数据判断无人值守远程数采的状态。
2硬件设计
设计硬件电路时,主要解决的问题有:控制指令与激光器的耦合、容性负载的驱动、多路信号的一致性、标准信号与触发信号间的时间关系及控制指令产生时的按键抖动消除。
2.1控制指令与激光器的耦合
输入信号与激光器的耦合通常采用直接耦合及阻容(RC)耦合[2-4]2种模式。直接耦合是指输入信号通过一定的整形电路后直接驱动激光器,这种模式电路简单,容易实现。但由于激光器工作时需要直流电压提供阈值电流,因此,该模式会将直流电压引入输入信号的前级电路,严重时将会影响系统的正常工作。RC耦合模式是指输入信号通过耦合电容后再驱动激光器。RC耦合模式可以克服直接耦合模式的直流串扰问题,但由于耦合电容的存在,输入信号的低频受到抑制。若电容选择不合适,输入信号将被微分成一个窄正脉冲和一个负脉冲,从而使系统出现误动作。
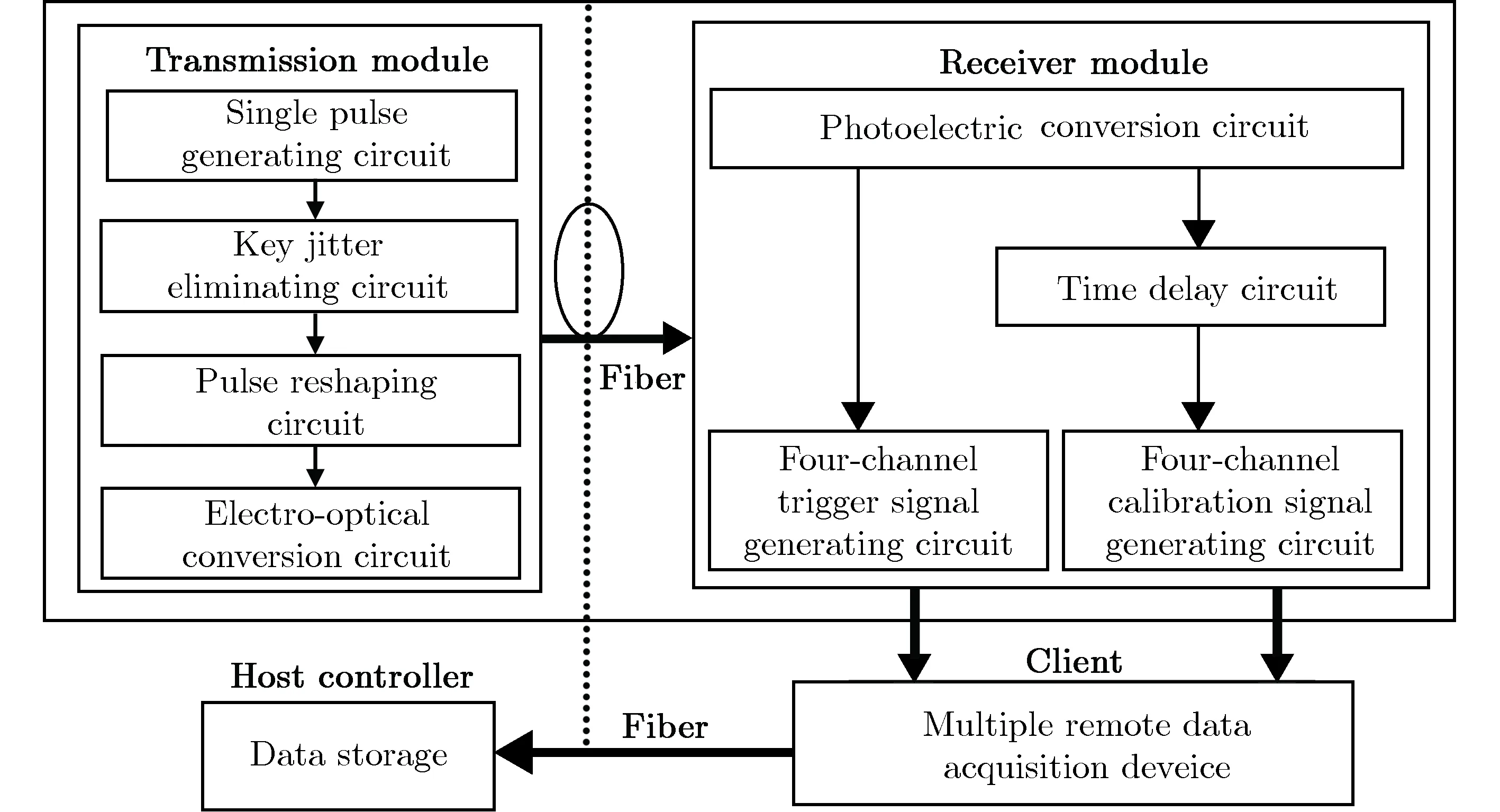
图1无人值守远程数采实时监控系统原理框图Fig.1Diagram of the real-time monitoring system for remote unattended data acquisition
为避免出现上述问题,本文采用了一种间接耦合模式,其原理框图如图2所示。首先,将输入信号Vin与激光器直流偏置电压Vref分别经运放A1、A2射随缓冲;然后,由运放A3及外围电路组成的比例求和电路进行叠加运算;最后,以运算结果驱动激光二极管。此时,输入信号Vin为控制指令。
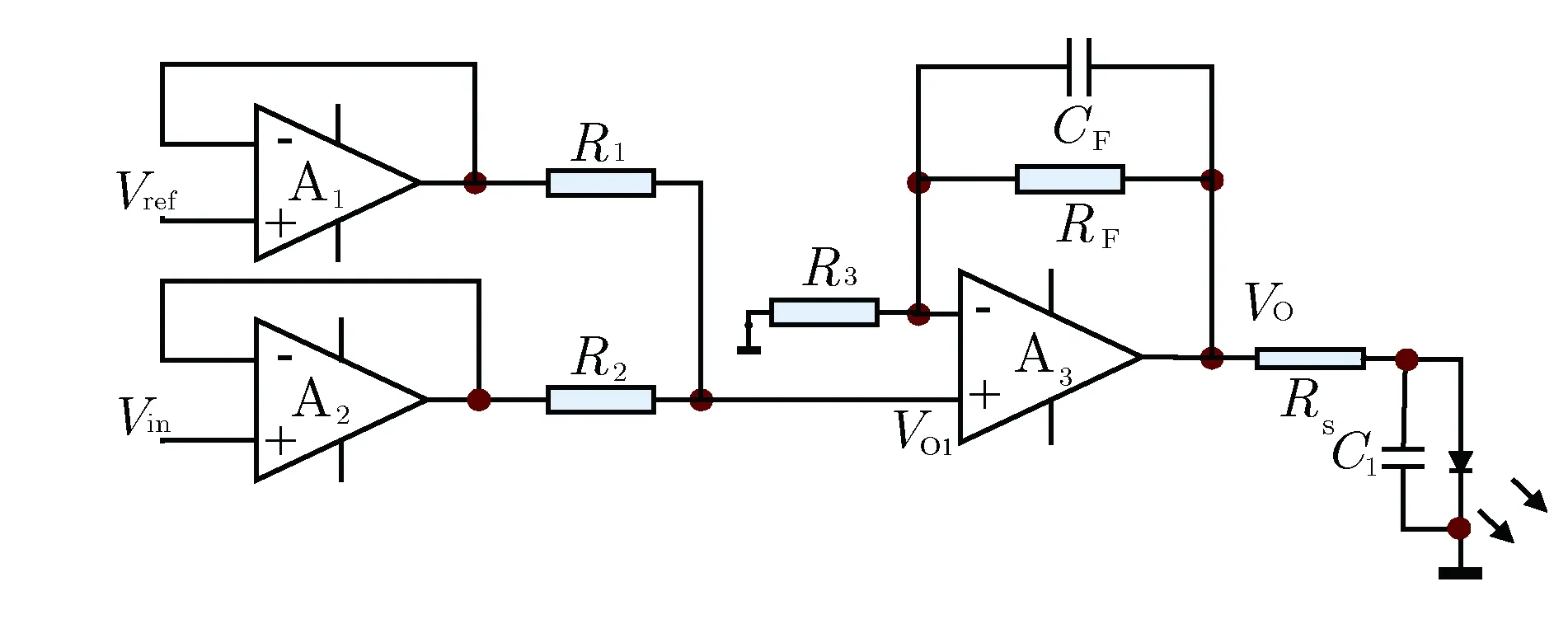
图2间接耦合原理框图Fig.2Schematic of indirectly coupled mode
输入信号Vin与直流偏置电压Vref经射随缓冲后的输出为
(1)
经比例求和后的输出为
(2)
由式(1)和式(2)可以看出,通过调节电阻R1、R2,可以调节激光器的调制深度,使之工作于较低功耗。
采用间接耦合的激光器驱动模式,实现了控制指令与激光器直流偏置电压的隔离,从而可避免两路信号互相干扰,提高系统的抗干扰性。
2.2容性负载的驱动
为减小系统噪声,设计中以运放直接驱动激光器。但由于激光器为容性负载,所以,系统容易产生振荡[5],这种现象在输入信号前沿为纳秒级时尤为明显。
为抑制振荡,除了采用可连接容性负载、带宽较高的运放驱动激光器外,还需在运放的输出端与容性负载激光器间串连电阻Rs,如图2所示。Rs的阻值取决于运放的增益及负载容值大小,在增益一定的情况下,容值越大,Rs的阻值越大。Rs的另外一个取值原则是要保证RsCl至少为输入信号脉宽的7倍,其中,Cl为负载激光二极管等效电容与寄生电容的并联值。
由于激光二极管工作时需要约1.0 V的直流电压,为保证其正常工作,驱动激光器的运放输出直流电压应满足:
(3)
其中,R0为激光器等效输入电阻。由式(3)可以看出,若串连电阻Rs过大,由于分压作用,激光器上直流分压与输入信号分压幅度随之降低,将会增加光电转换电路解调控制指令的难度。
此外,还采用超前补偿的方法抑制振荡,即在图2中运放A3的反馈电阻RF两端并接补偿电容CF。CF的引入对高、低频反馈系数的影响差别较大。对低频信号,CF对系统的频响无明显影响,但对高频信号,反馈系数将发生变化:
(4)
其中,R′=(R3+RF)/(R3RF)。
设F=R3/(R3+RF),f1=1/(2πRFCF),
f2=1/(2πR′CF),式(4)变为
(5)
可以看出,通过选择合适的f1、f2及CF,可使系统达到稳定。本系统中,由于控制指令的前沿大于5 ns,脉冲宽度为500 ns,经理论计算并实际调试后,CF取值为1.2 pF。
2.3多路信号产生
利用工作电压较高(±10 V)、输出电流较大(≥50 mA)的射频缓冲器产生快上升沿脉冲信号,再经功率分配后产生四路标准信号。
与一般的运放相比,射频缓冲器是在放大倍数为1时系统仍能保持稳定,而且提供的电流也较大;另外,射频缓冲器的容性负载驱动能力也较强。
同轴功率分配器带宽高、均分性好,但体积大,不便安装,且成本高。为此,利用对称性原理,设计了电阻式四等分功率分配电路。该电路能使各分路信号幅度和延迟时间保持较好的一致性,且具有较高的工作频带。具体做法是:采用圆对称辐射状分路设计,输入信号从圆心加入,4个分路电阻从圆周均匀辐射,保证各路信号线走线等距离,使各路信号的延迟时间相同;采用大面积接地,可保证较小的各路信号接地电阻,从而克服各信号之间的干扰,保证输出信号后沿光滑。分路电阻采用精度为0.1%的高精度电阻,使各路标准信号幅度差小于0.5%,时间差为 50 ps。
对触发信号,由于负载为高阻,不存在负载过重的问题,因此,多路信号的产生采用一对多的缓冲模式,将缓冲器的各路输出通过快响应二极管并联后直接输出,满足了各路触发信号之间幅度及时间的一致性要求。
四路触发信号及四路标准信号的波形如图3和图4所示。
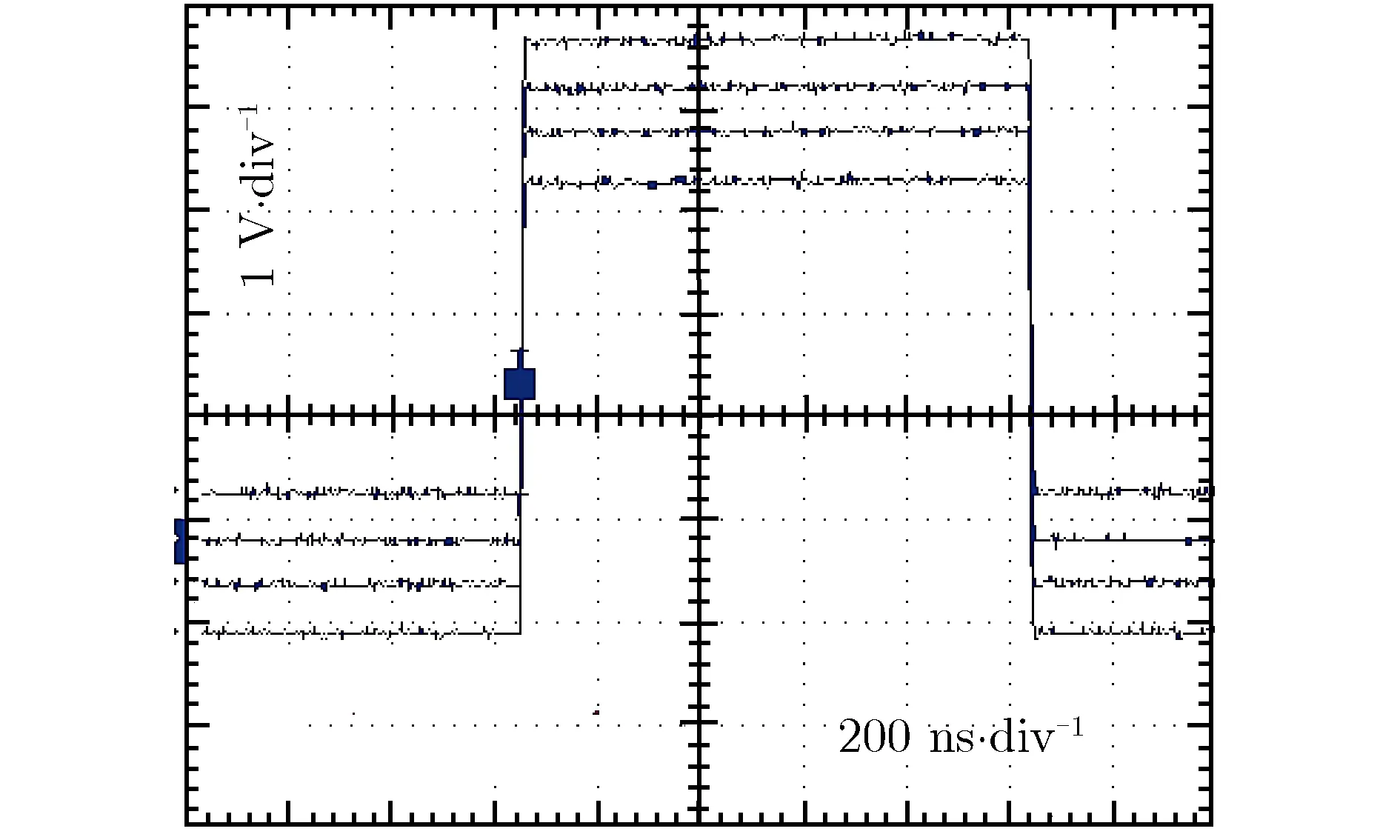
图3四路触发信号波形Fig.3Waveforms of four-channel trigger signals
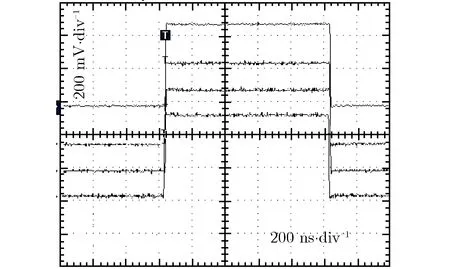
图4四路标准信号波形Fig.4Waveforms of four-channel calibration signals
图3中垂直灵敏度为1 V·div-1,水平灵敏度为200 ns·div-1,各路触发信号的幅度为4 V、上升时间小于1.5 ns、脉宽为1 μs;图4中垂直灵敏度为200 mV·div-1,水平灵敏度为200 ns·div-1,各路标准信号的幅度为500 mV、上升时间≤2.5 ns、脉宽为1 μs。
2.4标准信号与触发信号的时间关系
由于无人值守远程数采对标准信号与触发信号的响应时间不同,且需对无输入信号时的状态进行定时采集,故要求标准信号与触发信号的时间差为200 ns,时间间隔晃动≤5 ns。
脉冲信号的数字延迟方法通常有计数器法、存储器法及可编程延迟线法。通常,计数器法和存储器法采用通用可编程器件实现,便于集成,分辨精度可达皮秒量级,但延迟时间的晃动受限于工作频率;可编程延迟线法的电路简单,分辨精度达皮秒量级,且时间间隔晃动也可达皮秒量级[6],因此,本文系统采用可编程延迟线法。
可编程延迟线AD95××系列芯片的延迟精度可达10 ps。延迟时间可用tD=tPD+tSD表示,其中,tD为总延迟时间,tPD为芯片固有延迟,tSD为编程延迟时间,其表达式为
(6)
编程延迟时间范围为2.5 ns~10 μs,由外部电阻RSET和电容CEXT决定。可通过系列芯片的8位数据D0至D7,即n值,对编程延迟时间进行控制。编程延迟时间的精度为编程延迟时间范围区间的1/256。
标准信号与触发信号之间的延迟电路如图5所示,实际得到的标准信号与触发信号之间的时间间隔如图6所示。图6中,水平灵敏度为50 ns·div-1,ch1为标准信号,其垂直灵敏度为125 mV·div-1,ch3为触发信号,其垂直灵敏度为1 V·div-1,ch1与ch3的时间间隔为200 ns,时间间隔晃动小于1 ns。
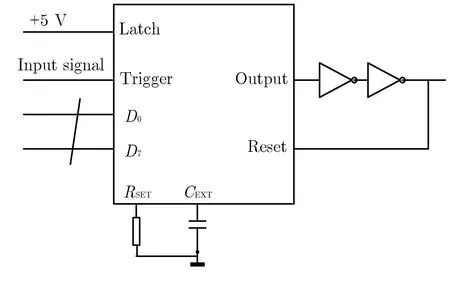
图5延迟电路Fig.5Schematic of time delay circuit
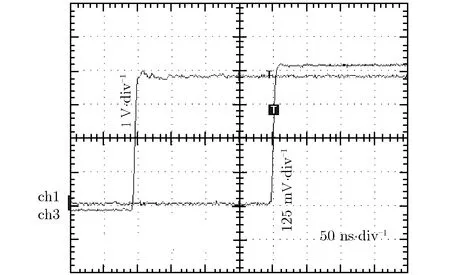
图6标准信号与触发信号的时间间隔Fig.6Time interval between calibration signal and trigger signal
2.5控制指令产生时的按键抖动消除
控制指令由带复位的单次按钮开关及外围电路组成,按动一次单次按钮开关,表示发送一次状态检查的控制指令。但单次按钮开关在按下时,常会产生多个脉冲[7-8],即所谓的“按键抖动”。消除按键抖动有硬件方法和软件方法,本文采用由单稳态电路组成的硬件方法。
单稳态电路的主要特点是输出信号宽度不受输入信号影响,只取决于外围电路的器件参数,即在一定时间内,电路只对第一个脉冲响应,该时间即为输出信号脉冲宽度。为有效消除按键抖动,避免指令被多次执行,输出信号脉冲宽度应远大于按键产生脉冲串的时间,前者至少为后者的10倍。通常,按键产生脉冲串的时间≤5 ms,为此,将输出信号脉冲宽度设置为800 ms。
利用单稳态电路的特点,很好地解决了输入为脉冲串、输出为单次脉冲的问题,避免了控制指令因按键抖动被多次执行的现象。
3结论
本文研制的基于光纤传输的无人值守远程数采实时监控系统,控制信号通过抗干扰性较强的光纤进行传输,可同时产生幅度分散性小于0.5%、时间分散性小于50 ps的四路标准信号和四路触发信号,每路标准信号与每路触发信号时间间隔200 ns,时间间隔晃动小于1 ns。
该系统成功应用于大型脉冲辐射场测量中,对四通道无人值守远程数采的工作及数据链路状态进行了实时监控,获得的监测数据可用于校正环境因素给测试数据带来的偏差,为测试数据的处理提供参考。
[1]史萌萌, 江海河. 光纤在测量与控制系统中的应用[J]. 测控技术, 2007, 26(9): 4-6. (SHI Meng-meng, JIANG Hai-he. Optic fiber appling to measuring and controlling systems[J]. Measurement & Control Technology, 2007, 26(9): 4-6.)
[2]袁林成, 蒋书波, 宋相龙, 等. 半导体激光器驱动电路的研究与设计[J]. 电子器件, 2015, 38(6): 1 287-1 290. (YUAN Lin-cheng, JIANG Shu-bo, SONG Xiang-long, et al. Research and design of driving circuit for semiconductor laser[J]. Chinese Journal of Electron Devices, 2015, 38(6): 1 287-1 290.)
[3]冯国斌, 刘福华, 杨鹏翎, 等. 实用化宽带模拟光纤传输系统[J]. 红外与激光工程, 2003, 32(6): 587-589.(FENG Guo-bin, LIU Fu-hua, YANG Peng-ling, et al. Practical broad band analog fiber optic transmission system[J]. Infrared and Laser Engineering, 2003, 32(6): 587-589.)
[4]梁芳, 强锡富, 孙晓明. 一种简便实用的半导体激光器调制电路[J]. 光学精密工程, 1999, 7(1): 96-99.(LIANG Fang, QIANG Xi-fu, SUN Xiao-ming. A simple and practical circuit for laser diode modulation[J]. Optics and Precision Engineering, 1999, 7(1): 96-99.)
[5]彭建盛. 高速运算放大器的容性负载驱动[J]. 兰州大学学报: 自然科学版, 2005, 44(增刊): 189-192.(PENG Jian-sheng. Driving capacitive loads of high speed operational amplifier[J]. Journal of Lanzhou University: Natural Science, 2005, 44(suppl.): 189-192.)
[6]李宏强. 高精度脉冲产生系统的设计与实现[D]. 西安: 西安电子科技大学, 2014.(LI Hong-qiang. Design and realization of high-accuracy pulse generation system[D]. Xi’an: Xidian University, 2014.)
[7]刘艳. 消除按键抖动的各种方法[J]. 电脑知识与技术, 2008, 3(8): 1 831-1 833.(LIU Yan. The ways of elimination of key jitter[J]. Computer Knowledge and Technology, 2008, 3(8): 1 831-1 833.)
[8]贾墨伊, 谭玉柱. 实用可控的按键抖动消除电路[J]. 现代电子技术, 2003, 150(7): 70-71.(JIA Mo-yi, TAN Yu-zhu. A practical controllable noise-proof circuit for button[J]. Modern Electronic Technique, 2003, 150(7): 70-71.)
A Real-Time Monitoring System Based on Optical Fiber Transmission for Remote Unattended Data Acquisition Devices
ZHANG Yan-xia,QU Hong-guang,WANG Jing,LI Hai-tao,RUAN Lin-bo
(Northwest Institute of Nuclear Technology,Xi’an710024,China;State Key Laboratory of Intense Pulsed Radiation Simulation and Effect,Xi’an710024,China)
Based on directly modulated semiconductor laser diode, a real-time monitoring system is designed to check the state of remote unattended data acquisition devices in strong radiation environment. The system can also generate four-channel calibration signals and four-channel trigger signals. The amplitude dispersibility and the time dispersibility among the calibration signals or the trigger signals are less than 0.5% and 50 ps, respectively. The time interval jitter between the calibration signal and the trigger signal is less than 1 ns. The system can simultaneously check the state and the data link of four-channel remote unattended data acquisition devices.
real-time monitoring;optical fiber transmission;remote unattended data acquisition devices;laser diode;indirectly coupled mode;dispersibility;multi-channel signals
2016-05-04;
2016-06-28 基金项目:国家自然科学青年基金资助项目(11305129)
张雁霞(1971- ),女,甘肃景泰人,高级工程师,硕士,主要从事脉冲辐射场测试及自动控制研究。
E-mail:zhangyanxia@nint.ac.cn
TN78
A
2095-6223(2016)031203(5)
多路信号
