置换蒸煮锅温度测量方法的改进及锅内温差控制
2016-11-14杨鹏飞党世红
汤 伟 杨鹏飞 党世红
(1.陕西科技大学电气与信息工程学院,陕西西安,710021;2.陕西科技大学轻工与能源学院,陕西西安,710021)
·温度测量·
置换蒸煮锅温度测量方法的改进及锅内温差控制
汤伟1杨鹏飞2,*党世红2
(1.陕西科技大学电气与信息工程学院,陕西西安,710021;2.陕西科技大学轻工与能源学院,陕西西安,710021)
针对置换蒸煮锅温差难以消除这一难题,在传统蒸煮锅温度测量的基础上,提出一种新的温度测量方法,并将神经网络控制、PID串级控制和解耦控制有机地结合起来, 提出一种神经网络PID串级解耦控制系统。解决了蒸煮锅温度控制时滞性、时变性和非线性等问题,应用Matlab仿真比较表明,该控制系统具有更好的动态性能和鲁棒性,其控制效果明显优于常规PID串级控制系统。
置换蒸煮系统;温差控制;蒸煮锅;神经网络PID;串级解耦
(*E-mail: 401371274@qq.com)
在置换蒸煮制浆系统中,蒸煮锅是压力容器,由于其复杂的内部结构和特殊的工作环境,一般通过在锅体循环管路安装温度仪来间接测定锅内温度。蒸煮锅体积较大,上下高度十几米,因此上下循环管路的温度并不能真实地体现蒸煮锅上部和下部浆料的温度。为防止产生不均匀的蒸煮现象,要求蒸煮锅内温差保持在5℃以内,而蒸煮锅多数采用蒸汽外部强制加热,将蒸煮液加热到所需的最高温度,再将蒸煮液循环到锅内对浆料进行加热。在该过程中通常根据顶部与底部蒸煮液的回流量来调节锅内温差,但顶部与底部流量存在强耦合关系。此外锅内压力、药液成分、热交换器出口药液温度等因素都会影响蒸煮锅内温度。因此蒸煮锅温差控制具有耦合性、时变性和非线性等特点,常规PID串级控制不能满足要求,对能量浪费也比较大。本课题在改进蒸煮锅测量方法的基础上,采用神经网络PID串级解耦控制对蒸煮锅顶部和底部温度进行控制,很好地解决了蒸煮锅温差控制耦合性、时变性和非线性等问题。
1 蒸煮锅温度测量方法改进
现行的置换蒸煮系统通过在上中下循环管路安装温度测量仪来间接测量蒸煮锅内温度,如图1中TI-156,TI-154,TI-155所示。这样其实很难获取蒸煮锅内实际的温度和温差,因为在升温保温过程中,蒸煮液被循环泵从蒸煮锅中部篦子抽出,经中压蒸汽加热后,分别由蒸煮锅顶部和底部篦子回流进入锅内。安装在中部的仪表TI-154可以用来表征锅内中部药液温度,因为蒸煮液从蒸煮锅内往外流,而底部和上部的温度仪表测的是蒸汽加热后上下管路的温度,液体从蒸煮锅外向内流动。因此TI-156和TI-155并不能真实地表征蒸煮锅内上下药液温度,不能准确获得蒸煮锅内上下药液温差[1-3]。
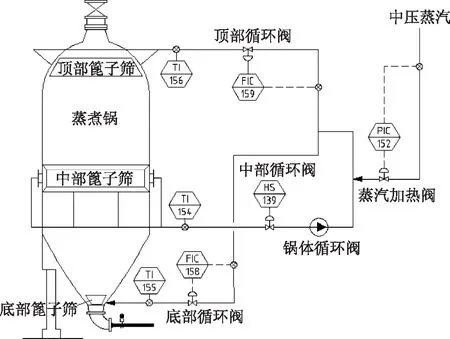
图1 置换蒸煮系统升温保温过程示意图
现行工艺之所以不直接在锅体开孔插入温度仪测温,是因为在蒸煮过程中蒸煮锅是压力容器,同时在蒸煮开始时要往蒸煮锅中加入木片,会砸坏伸入其中的温度仪。考虑到这些因素,本课题提出在蒸煮锅上下紧挨锅壁部分焊接上两个316不锈钢管,如图2所示。在管子末端开有小孔用来取液,上部取液管长度应深入到上部循环管路位置,从而满足升温保温阶段蒸煮锅内上部取液要求,然后在管内安装温度测量仪。挨着管壁的管子不仅使管子自身不被破坏,同时也不影响蒸煮锅的装锅量,避免形成大量窜道,防止不均匀蒸煮现象的产生,管子末端开造的小孔将一部分蒸煮液从木片中间分离出来,便于准确测量蒸煮液温度。这样不仅满足了取液测温的要求,同时也保证了蒸煮料塞结构不被破坏,在不破坏锅体结构和蒸煮过程机理的同时准确测得蒸煮锅体内部上下药液温度,便于进一步控制蒸煮锅内温差。

图2 蒸煮锅测温取液管示意图
如此设计用TI-156和TI-155分别测得蒸煮锅上下部分药液温度并通过控制回路FIC-159和FIC-158控制上下药液的回流量使蒸煮锅内上下温度都达到相同设定值,从而消除蒸煮锅内的药液温差。

图3 改进后的升温保温过程示意图
2 温差控制系统的设计
传统的PID调节器结构简单、调整方便、参数整定与工程指标联系密切,但是控制器的参数难以自动调整以适应外界环境的变化,因此难以对复杂过程和参数慢时变系统进行有效控制。而神经网络具有很好的自学习适应能力、并行信息处理能力和容错性能,神经网络与传统PID控制相结合所得的控制系统具有更强的适应性和鲁棒性,可以很好地解决蒸煮锅温差控制系统的耦合性、时变性和非线性等问题。
2.1BP神经网络PID控制器
BP神经网络由于其具有逼近任意非线性函数的能力,而且结构和学习算法简单明确,因此在神经网络PID控制中常采用BP网络结构来建立PID控制器。通过BP神经网络自身的学习,从而可以找到某一最优控制律下的P、I、D参数。基于BP神经网络的PID控制系统结构如图4所示,控制器由两部分组成。
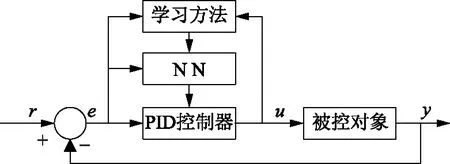
图4 BP神经网络PID控制结构框图
(1)经典的PID控制器:直接对被控对象进行闭环控制,并且KP、KI、KD3个参数为在线整定。
(2)神经网络NN:根据系统的运行状态对应于PID控制器的3个可调参数KP、KI、KD。通过神经网络的自学习、调整权系数,从而使其稳定状态对应于某种最优控制律下的PID控制器参数。PID的控制算式见公式(1)。
u(k)=u(k-1)+KPΔe(k)+KIe(k)+KDΔ2e(k)
(1)
式中,KP、KI、KD分别为比例、积分、微分系数。将KP、KI、KD作为依赖于系统运行状态的可调系数时,可将公式(1)描述为公式(2)。
u(k)=f[u(k-1),KP,KI,KD,e(k),Δe(k),Δ2e(k)]
(2)

图6 控制系统框图


图5 BP神经网络结构图
2.2神经网络PID串级解耦控制系统
3 仿真及实验结果分析
3.1系统仿真及其分析
仿真结果如图7和图8所示,当系统阶跃响应进入稳定区域后,在1000 s处添加一次正干扰信号,在2000 s处添加二次负干扰信号,结果表明采用神经网络PID串级解耦控制的流量-温度串级控制系统比普通的PID串级控制能够以更小的超调量在更短的时间内达到设定值,对干扰的抑制效果也更加明显,表明本课题提出的控制方案可以根据系统误差及其变化率对PID的3个参数进行修正,控制系统动态响应曲线更好。

图7 常规PID串级控制系统仿真曲线

图8 神经网络PID串级解耦控制系统仿真曲线
3.2运行结果及其分析
该控制系统已经在四川某纸业的置换蒸煮车间成功试运行,图9为实际运行中的蒸煮锅顶部和底部温度监控画面,其中TT_156为顶部温度控制曲线,TT_155为底部温度控制曲线。由图9可以看出实际运行结果和仿真结果十分相似,对蒸煮锅顶部和底部设定相同的温度值,然后采用神经网络PID串级解耦系统进行控制,可以将蒸煮锅上下部分温度都稳定在同一个设定值,大大减小了蒸煮锅上下部分的温差。

图9 实际运行中的温度监控画面
实际结果表明,本课题提出的控制方案可以根据系统误差及其变化率对PID的3个参数进行修正,控制系统动态响应曲线更好,很好地解决了蒸煮锅温度控制时滞性、时变性和非线性等问题,避免蒸煮锅温度控制过程中温度的大幅度跳动,使蒸煮锅上下温度稳定在同一设定值,从而消除蒸煮过程蒸煮锅内的温差,保证了蒸煮锅顶部和底部药液温度均匀一致。
4 结 语
在改进置换蒸煮锅温度测量方法的基础上,采用神经网络PID串级解耦控制系统对蒸煮锅顶部和底部温度进行控制,可以将蒸煮锅顶部和底部的温度稳定在相同的设定值从而消除误差,解决了蒸煮锅温度控制时滞性、时变性和非线性等问题,控制效果明显优于常规PID串级控制系统。
[1]LV Ding-yun, HAN Xiao-juan, TANG Wei. The Latest Development of Displacement Batch[J]. China Pulp & Paper, 2007, 26(12): 67.
吕定云, 韩小娟, 汤伟. 置换间歇式蒸煮的新进展[J]. 中国造纸, 2007, 26(12): 67.
[2]SHI Sheng-tao, JIANG Qing-sheng, JIANG Yan-li. The Features of DDS Cooking System Temperature Control of a Bitch Digester[J]. China Pulp & Paper, 2011, 30(9): 44.
时圣涛, 江庆生, 姜艳丽. DDS间歇置换蒸煮的特色[J]. 中国造纸, 2011, 30(9): 44.
[3]DING Shi-huo, ZHANG Ming-Feng, WANG Wu-xiong. New Development of RDH Batch Cooking Technology for DDSTMDisplacement Cooking System [J]. China Pulp & Paper, 2005, 24(6): 62.
丁仕火, 张铭锋, 王武雄. DDSTM置换蒸煮系统RDH间歇蒸煮技术新发展[J]. 中国造纸, 2005, 24(6): 62.
[4]ZENG Jun, Fang Hou-hui. Neural Network Control and Its Matlab Simulation[J]. Academic Electronc, 2004, 52(2): 51.
曾军, 方厚辉. 神经网络PID控制及其Matlab仿真[J]. 现代电子技术, 2004, 52(2): 51.
[5]TANG Wei, WANG Zhen, DANG Shi-hong. DMC-PID Cascade Decoupling Control of Temperature Difference in Displacement Digester[J]. China Pulp & Paper, 2014, 33(12): 47.
汤伟, 王震, 党世宏. 蒸煮锅内温差DMC-PID串级解耦控制[J]. 中国造纸, 2014, 33(12): 47.
[6]HOU Xiao-hu, TANG Wei, XU Bao-hua. Design of Displacement Digester Temperature Difference Control System Based on Fuzzy Self-adjusting PID[J]. Paper Science & Technology, 2012, 31(4): 67.
侯晓虎, 汤伟, 许保华. 基于模糊自整定PID的置换蒸煮锅温差控制系统的设计[J]. 造纸科学与技术, 2012, 31(4): 67.

(责任编辑:马忻)
Improved Temperature Measurement and Temperature Difference Control of the Displacement Digester
TANG Wei1YANG Peng-fei2,*DANG Shi-hong2
(1.CollegeofElectricalandInformationEngineering,ShaanxiUniversityofScienceandTechnology,Xi’an,ShaanxiProvince, 710021;2.CollegeofLightIndustryandEnergy,ShaanxiUniversityofScienceandTechnology,Xi’an,ShaanxiProvince, 710021)
Aiming at the difficulties of eliminating temperature difference in the displacement digester, this paper proposed a new method for measuring temperature based on the traditional digester temperature measurements. With combining neural network control, PID cascade control and decoupling control, a neural network PID cascade decoupling control system was proposed. The problems of time delay, time-varying and nonlinear in digester temperature control were solved, Matlab simulation comparison showed that the neural network PID cascade control system had better dynamic performance and robustness, its control performance was superior to the normal PID control system.
displacement digester system; temperature difference control; digester; neural network PID; cascade decoupling
汤伟先生,博士,教授;主要研究方向:制浆造纸全过程自动化、工业过程高级控制、大时滞过程控制及应用。
2015-12-25(修改稿)
本课题得到国家国际科技合作项目(2010DFB43660) 及陕西省重点科技创新团队计划项目(2014KCT-15)的资助。
杨鹏飞先生,E-mail:401371274@qq.com。
TS733+.2
ADOI:10.11980/j.issn.0254- 508X.2016.07.010
