智能水雷敌我识别及关键参数分析*
2016-11-12应朝龙刘春霞孙艳丽
李 超,应朝龙,刘春霞,孙艳丽
智能水雷敌我识别及关键参数分析*
李 超**a,应朝龙b,刘春霞a,孙艳丽b
(海军航空工程学院a.研究生管理大队;b.基础实验部,山东烟台264001)
为了解决传统水雷对敌我双方都构成威胁的问题,在分析敌我识别技术工作原理的基础上,提出了一种智能水雷敌我识别流程和敌我识别装置实现方法,通过理论分析和仿真研究了声传播损失和传播距离、发射信号中心频率之间的关系,分析了影响水雷识别距离的参数,得出了识别距离应不小于1 km的结论,为未来水雷的智能化改造提供了依据。
水声通信;敌我识别;智能水雷;识别距离
1 引 言
现代电子战和信息战具有突发性、快速性、海陆空一体化、持续时间短等特点,势必要求对攻击目标的敌我属性进行快速、准确、可靠的识别,以避免在战争中造成对己方目标的误伤。敌我识别(Identifi_ cation Friend or Foe,IFF)是采用主动或被动方式来判断敌友及其意图的电子系统,主要用于完成陆海空三军及各兵种的敌我识别任务[1]。目前,比较成熟的敌我识别系统通信一般都是使用无线电,一些新型的敌我识别器也采用激光和毫米波进行通信,但是这些敌我识别装置大多安装在空中、陆基和水面平台。
水雷作为一种海军重要的战术、战略武器,具有成本低廉、使用简单、破坏力大等优点,在封锁港口和海上通道等方面发挥着重要作用,因此一直受到各国的高度重视。随着电子技术的发展,传统水雷在引信系统、遥控、自导等方面已有很多发展,但目前还没有关于水雷具备敌我识别能力的文献报道。本文的主要目的是从空中、陆基和水面平台的敌我识别思路出发,研究水雷的敌我识别智能化改造方法及其关键参数确定方法。
2 敌我识别工作原理
敌我识别系统往往是各国极为保密的军用装备,相关技术资料比较少,所以本文只分析介绍简要工作原理。敌我识别系统从工作原理上一般可分为主动式敌我识别系统和被动式敌我识别系统两类[2-3]。
(1)主动式敌我识别系统
主动式敌我识别系统由询问机和应答机两部分构成,通过两者之间数据保密的询问/应答通信实现识别。首先由询问机发出一个无线电询问信号,目标应答机接收询问信号,如果接收到的询问信号是正确的询问代码,则应答机将给询问机自动发送出所请求的应答信号,然后询问机对应答信号进行解码,从而识别出目标的敌我属性。
(2)被动式敌我识别系统
被动式敌我识别系统没有与目标间的通信过程,是将被识别目标看作系统的外部环境,通过传感器对其结构特征(目标二维投影的长度、宽度、面积等)、统计特征(均值和均方误差等)、空间特征(方向、位置、速度和距离等)和反射参数/信号特征进行观测,收集目标各方面信息。这些信息被汇总到数据处理中心、通过固定的算法,利用系统处理器对数据进行相关分类、特征匹配来判别目标的敌我属性。
3 水雷敌我识别系统
目前,各种平台间的敌我识别信息均是以无线电的形式在空气中传播,由于无线电频率高,在水中传播很容易衰减,因此水雷的敌我识别信息只能依靠声波进行传递,声波在水中的传输同样受很多因素的影响,这些因素会造成声波在水声信道传输中能量的衰减[4-6],所以如何设置敌我识别系统中相关水声参数,将声波能量的损失控制在合适范围至关重要。敌我识别系统中另一个重要参数就是识别距离,它的选取设定也与多种因素有关。本节在介绍敌我识别系统组成和工作流程的基础上,对敌我识别系统相关参数进行研究。
3.1 水雷敌我识别系统的组成
水雷敌我识别系统总体组成框图如图1所示。
图1 水雷敌我识别系统总体组成框图Fig.1 Overall comPosition block diagram of mine IFF sYstem
水雷敌我识别系统包括舰上设备和雷上设备两部分。对于舰艇方面信息源指激活和应答信号,它是由帧同步信号、指令信号组成。发送装置是对信息源根据误码率和保密性要求进行编码、转换、发送的装置。当数字频带信号进入海水后会受到多种环境、人为因素的干扰,使接收端信号变得很复杂。对于水雷上的接收装置,是高灵敏度的水声换能器、具备处理复杂信号能力和纠错解码能力的处理器。信息宿则是实现水雷安全和战斗两种状态转换装置。反之,水雷方面同样可以作为询问信息和确认信息的发出方,其原理同上,这里不再赘述。
3.2 雷上敌我识别装置组成
雷上敌我识别装置是敌我识别系统最关键的部分,为了保证工程可实现性,它既要尽可能地满足小型化和低功耗的要求,更要保证识别的可靠性。雷上敌我识别装置的组成框图如图2所示。
图2 水雷敌我识别装置组成框图Fig.2 ComPosition block diagram of mine IFF device
图2 中,传感器信号输入电路主要完成水声信号的检测,其输出经采集电路送到中央处理器(Cen_ tral Processing Unit,CPU);中央处理器完成对输入信号的处理和识别后,一方面通过输出电路和换能器发出应答信号,另一方面根据识别结果引信控制电路控制引信系统触发电路的通断。图中的参数装订电路和存储器可以装订本装置的识别码等重要参数。为了保证敌我识别码等重要信息的安全,本装置需要配置自毁信号检测电路和自毁电路,一旦检测到需要自毁的信号,则启动自毁流程,销毁存储器中的所有数据。供电电路为本装置各个部分提供供电电源。
3.3 识别流程
图3为水雷敌我识别流程图。
图3 水雷敌我识别流程图Fig.3 FloW chart of mine IFF
在布雷时,由布雷装备向水雷下载识别数据,水雷进入待机和信号接收状态。我方舰艇接近或进入雷区时,以一定频率不断向前方海域发送第一组敌我识别码,当水雷接收到敌我识别信号时,如果识别码为我方正确识别码,则水雷向舰艇发送敌我识别询问信号,要求舰艇回复某一个序号的敌我识别码,舰艇按要求发送与序号相对应的第二组识别码,水雷收到这组识别码后,与存储器中的对应编码比较,若相符则关闭引信系统,并向舰艇发送一个确认信号,告诉舰艇已进入安全状态;若识别码不符,水雷将不作任何反应,引信系统仍将处于战斗状态。在上述编码中,第一组编码是固定的,有可能被敌方侦听和截获;而第二组编码是变化的,在水雷中存储了很多个序号的编码,而且每个序号的编码只使用一次,因此即使敌方侦听到第二组编码,也是没用的。只要在水雷中的编码数据库和舰艇上的编码数据库不被敌方截获,就可保证敌我识别的可靠。
3.4 水雷敌我识别系统关键参数分析
理想的传输信道是无损均匀介质空间,传输过程中信号不会产生太大变化,但是海洋是一个极其复杂的声信道,对声的传播有着不同的影响,所以如果想实现水雷敌我识别信息的可靠、准确传输,就要了解水声信道的相关性质,从水声信道入手,对水雷敌我识别系统的一些关键参数进行研究[7]。
3.4.1 声传播损失
声波在水声信道中传输过程很复杂,要受到很多因素的影响,为了综合考虑这些影响因素,我们引入声纳方程。它有效地将水声设备和介质联系到了一起,为声纳的通信距离、通信速率以及误码率等参数的设计提供参考。被动声纳方程为

式中:(DT)i为接收机输入检测阈;SL为声源级;TL为传输损失;NL为噪声谱级;DIr为接收机指向性系数。
声波在水声信道中传播会受到多种因素的影响,其传播损失与传播距离直接相关,而计算传播损失是比较复杂的,一般我们认为造成声传播损失的原因主要包括波阵面的几何扩展、海水的吸收、边界损失以及散射。传播损失主要表现为扩展损失和衰减损失[7]。首先对水声信道中声波波阵面的扩展模式作简化,假定声波的波阵面遵从球面扩展规律,尤立克给出的浅海、短距离传输损失经验公式为[8-9]

式中:r为声传播距离;β为吸收系数;20lgr为传输损失;βr为衰减损失;kL为近场异常衰减(与海底底质和海况有关)。
对于吸收系数β采用经验计算公式:

式中:f为信号频率。
3.4.2 识别距离
在智能水雷敌我识别系统中,识别距离为舰艇开启通信声纳时与雷区的距离,识别距离过近,可能会出现舰艇与水雷还没有完成整个识别流程时,舰艇就已经进入水雷杀伤范围,将会危及舰艇本身;识别距离过远将会增大我方舰艇被敌方侦听的几率,所以确定识别距离的最小值十分重要。图4为智能水雷敌我识别系统识别示意图。
图4 智能水雷敌我识别系统识别示意图Fig.4 Identification schematic diagram of intelligent mine IFF sYstem
设激活码长度为L1,询问码长度为L2,应答码长度为L3,确认码长度为,数据包头长度为l,识别码总长度为L,询问、应答次数为N,则

水声系统通信速率为I,舰艇前进的距离为d1,舰艇速度为υ,水雷杀伤范围D,识别距离下限值为d,则有

于是,我们可以求得识别距离的下限值为

4 水声信道参数仿真
4.1 声传播损失仿真
海洋环境复杂,状态变化快,具体情况需要具体考虑,所以本文以浅海常见情况为例,假设海况为3级海况,海底底质为泥底,查表可知kL为4.6 dB,当发射信号频率分别为0.5 kHz、1 kHz、1.5 kHz、2 kHz时,声传播损失随传播距离变化的曲线如图5所示[10]。
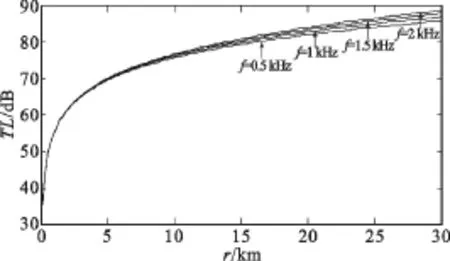
图5 声传播损失随距离变化曲线Fig.5 Change curve of sound transmission loss
由图5可以看出,声传播损失是f的函数,且随f的增大而增大,控制传播损失的有效途径就是降低发射信号频率;声传播损失也是r的函数,且随r的增大而增加,信号衰减速率降低。声传播损失主要与距离的关系较大。当距离较小(不大于2 km)时,声传播损失较小(不大于70 dB),可以采用普通的水声通信系统实现可靠通信。
4.2 识别距离仿真
一般水雷杀伤范围D在确定水雷的型号和装药量以后基本可以确定,编码长度一般为2n,观察水雷杀伤范围、编码总长度、通信速率和舰艇前进速度与识别距离之间的关系。
(1)根据现有技术,一般小体积的水声通信设备的通信速率不难达到2 kb/s,当I为1 kb/s、1.5 kb/s、2 kb/s,l=64 b,L1=64 b,L2=16 b,L3=64 b,L4= 16 b,N=1,即编码总长L为224 b,D=300 m时,可得d随υ变化的关系曲线如图6(a)所示;
(2)当υ=20 kn,D=300 m,l=64 b,L1=64 b,L2=16 b,L3=64 b,L4=16 b,N为1、3、5,即编码总长度为224 b、384 b、544 b,d随I变化的关系曲线如图6(b)所示;
(3)当l=64 b,L1=64 b,L2=16 b,L3=64 b,L4=16 b,N=1,即编码总长度为224 b,I取1 kb/s,舰艇速度υ为15 kn、20 kn、25 kn、30 kn时,d随D变化的关系曲线如图6(c)所示。
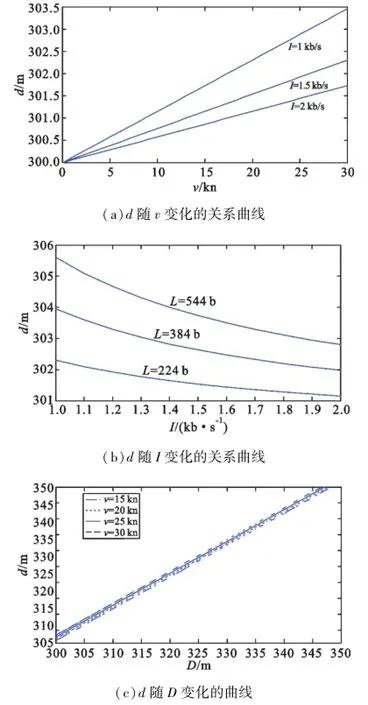
图6 识别距离d的变化曲线Fig.6 Change curve of identification distance
由以上仿真结果可见,d是编码总长L、杀伤范围D、通信速率I、舰艇速度υ的函数,具体变化关系一是d随υ的增加而增大,二是d随I的增大而减小,三是d随杀伤范围D的增大而增大,四是d随L的增加而增大。由分析可知,识别距离最小值d虽然与以上4个参数均有关,但主要影响因素是水雷的毁伤范围,编码长度、通信速率和舰艇航速对识别距离下限值的影响很小。所以在考虑水雷可靠通信距离时,主要关注水雷的毁伤范围,而水雷的毁伤范围一般受装药量和装药方式影响,考察绝大部分水雷毁伤范围上限一般均不超过500 m。考虑到目前各种嵌入式系统的处理速度已经非常快,处理任务能在ms量级时间内完成,因此上述仿真结果表明,只要水雷敌我识别水声通信系统的可靠通信距离超过1 km,就可以保证水雷敌我识别的可靠性。
从上述仿真结果可以看出,在水声通信系统的通信速率超过1 kb/s时,通信速率对识别距离下限值影响较小;影响识别系统使用的主要指标是通信系统的通信距离。因此,综合上述仿真分析结果,可以得出对水声通信系统的主要指标要求一是可靠通信距离不小于1 km,二是通信速率不低于1 kb/s。
5 结束语
本文提出了水雷敌我识别系统的组成及工作原理,从声纳方程出发,对声传播损失、识别距离两个系统参数指标进行了理论分析,仿真得到了声传播损失与传播距离、信号频率的关系,研究确定了识别距离的下限值应不低于1 km。
下一步将在充分考虑海洋环境的多径、起伏和多普勒效应,对水声信道中声信号的传输路径进行具体分析后,基于单片机对水雷敌我识别控制器进行设计和仿真验证,最终对现役水雷进行智能化改造。
[1] 曹晓蓓.综合敌我识别方法研究[J].电讯技术,2010,50(12):1-3. CAO Xiaobei.StudY on intergrated IFF technologY[J]. Telecommunication Engineering,2010,50(12):1-3.(in Chinese)
[2] 郝雁中,吕斌,陈超,等.敌我识别系统干扰和防御方法[J].电讯技术,2010,50(12):125-128. HAO Yanzhong,LYU Bin,CHEN Chao,et al.Jamming and defencing on IFF sYstems[J].Telecommunication Engineering,2010,50(12):125-128.(in Chinese)
[3] 陈非凡,苑京立.国外敌我识别技术的现状及发展趋势[J].电讯技术,2001,41(2):5-10. CHEN Feifan,YUAN Jingli.NeW develoPments on IFF technologY[J].Telecommunication Engineering,2001,41(2):5-10.(in Chinese)
[4] 许天增,许鹭芬.水声数字通信[M].北京:海军出版社,2010:19-26. XU Tianzeng,XU Lufen.UnderWater acoustic digital com_ munication[M].Beijing:Ocean Press,2010:19-26.(in Chinese)
[5] 张歆,张小蓟.水声通信理论与应用[M].西安:西北工业大学出版社,2012:25-30. ZHANG Xin,ZHANG Xiaoji.TheorY and aPPlication of un_ derWater acoustic communication[M].Xi′an:NorthWestern PolYtechnical UniversitY Press,2012:25-30.(in Chinese)
[6] 樊昌信,曹丽娜.通信原理[M].北京:国防工业出版社,2008:10-14. FAN Changxin,CAO Lina.Communication theorY[M]. Beijing:National Defense IndustrY Press,2008:10-14.(in Chinese)
[7] 罗永升.远程水声通信系统的编码技术研究[D].西安:西北工业大学,2007. LUO Yongsheng.Research on channel coding technique suitable for long range underWater acoustic communication [D].Xi′an:NorthWestern PolYtechnical UniversitY,2007.(in Chinese)
[8] 李萍.远程水声信号遥控接收系统研究[D].西安:西北工业大学,2003. LI Ping.Research on the remote control receiving sYstem With long-distance underWater acoustic signal[D].Xi′an:NorthWestern PolYtechnical UniversitY,2003.(in Chinese)
[9] 黄博.微功耗水声遥控系统解码技术研究[D].哈尔滨:哈尔滨工程大学,2010. HUANG Bo.Research on decoding technologY for micro-PoWer consumPtion underWater acoustic remote control sYstem[D].Harbin:Harbin Engineering UniversitY,2010.(in Chinese)
[10] 赵谦.通信系统中MATLAB基础与仿真应用[M].西安:西安电子科技大学出版社,2010:56-68. ZHAO Qian.Basis of MATLAB and simulation aPPlica_ tion in communication sYstem[M].Xi′an:Xidian Uni_ versitY Press,2010:56-68.(in Chinese)

李 超(1990—),男,辽宁凤城人,2013年获工学学士学位,现为硕士研究生,主要研究方向为智能仪器设计与计量校准;
LI Chao Was born in Fengcheng,Liaoning Province,in 1990.He received the B.S.degree in 2013.He is noW a graduate student.His re_ search concerns intelligent instrument design and calibration of measurement.
Email:leechao6991@163.com
应朝龙(1964—),男,浙江仙居人,硕士,副教授,主要研究方向为智能仪器设计;
YING Chaolong Was born in Xianju,Zhejiang Province,in 1964.He is noW an associate Professor With the M.S.degree. His research concerns intelligent instrument design.
刘春霞(1990—),女,河北石家庄人,2013年获工学学士学位,现为硕士研究生;
LIU Chunxia Was born in Shijiazhuang,Hebei Province,in 1990.She received the B.S.degree in 2013.She is noW a gradu_ ate student.
孙艳丽(1982—),女,山东莱阳人,2009年获工学硕士学位,现为讲师,主要研究方向为信号处理。
SUN Yanli Was born in LaiYang,Shandong Province,in 1982.She received the M.S.degree in 2009.She is noW a lec_ turer.Her resarrch concerns signal Processing.
Identification Friend or Foe of Intelligent Mine and Key Parameters Analysis
LI Chaoa,YING Chaolongb,LIU Chunxiaa,SUN Yanlib
(a.Graduate Students’Brigade;b.DePartment of Basic ExPeriment,NavY Aeronautical and Engineering UniversitY,Yantai 264001,China)
In order to solve the Problem that traditional mine can be a threat to both sides,an identification friend or foe(IFF)Process and a realization method of IFF device for intelligent mine are Presented through analYzing the Working PrinciPle of IFF technologY.The relationshiPs betWeen the loss of sound ProPagation and ProPagation distance,the center frequencY of transmit signal are also studied through theoretical analY_ sis and simulation,and Parameters influencing the identification distance are analYzed.The conclusion is draWn that the recognition distance should be no less than 1 km,Which Provides a certain basis for the in_ telligent mine transformation in the future.
acoustic communication;IFF;intelligent mine;identification distance
TN929.3
A
1001-893X(2016)01-0093-05
10.3969/j.issn.1001-893x.2016.01.017
李超,应朝龙,刘春霞,等.智能水雷敌我识别及关键参数分析[J].电讯技术,2016,56(1):93-97.[LI Chao,YING Chaolong,LIU Chunxia,et al.Identification friend or foe of intelligent mine and keY Parameters analYsis[J].Telecommunication Engineering,2016,56(1):93-97.]
2015-05-18;
2015-07-28 Received date:2015-05-18;Revised date:2015-07-28
**通信作者:leechao6991@163.com Corresponding author:leechao6991@163.com
