基于总量控制的城镇桥梁信号协调模糊控制
2016-11-12翁小雄
陈 俊,翁小雄
(华南理工大学土木与交通学院, 广东广州510640)
基于总量控制的城镇桥梁信号协调模糊控制
陈 俊,翁小雄
(华南理工大学土木与交通学院, 广东广州510640)
为提高桥梁两端交叉口的通行能力,减少桥梁上车辆的排队长度,降低车辆拥堵对桥梁的损害,提出一种总量控制的思想,根据不同桥梁可容纳的最大车辆总量,对桥梁两端交叉口进行实时的信号协调模糊控制,并以最大排队长度为评价指标。通过MATLAB和VISSIM仿真,结果表明:最大排队长度由溢出减少至25.1辆,能够有效地提高桥梁及其两端交叉口的通行能力及运行效率,降低桥梁交通拥堵对桥梁安全的影响。
桥梁交通;总量控制;干线协调控制;模糊控制
0 引 言
桥梁,是跨江河城镇交通的重要衔接,城镇桥梁一般建设的比较早,桥梁路幅宽度较小,而经济不断发展,带来了城市与城镇的交通量和车载吨位不断增长,交通量的增加使依靠跨江河出行的桥梁成为城镇路网的瓶颈和交通事故的多发点;使得桥梁上的交通拥堵、超载等现象对桥梁的损伤已经不能忽略[1]。
影响桥梁安全,引起桥梁损伤的因素很多,其中最主要的原因是桥梁荷载发生变化,当桥梁的荷载改变以后,将带来一系列引起桥梁结构的变化[2]。而引起桥梁荷载变化的主要原因则是因交通量增加而带来的交通拥堵,不同的车辆组成模式和组成数量对桥梁的荷载效应也不一致。比较车辆拥堵模式对桥梁的影响可知,由小汽车组成的车辆拥堵模式下的荷载效应,包括梁体剪力和弯矩,均小于设计荷载效应,对桥梁安全影响较小,而全部大货车组成的车辆拥堵模式下的荷载效应值,已经超过桥梁的标准荷载效应值的一倍或数倍之多,且该模式的堵车怠速工况下,桥梁结构与车辆容易产生明显的共振效应[3]。莫增模[4]接着对车辆与桥梁的共振效应进行了更深的研究,研究怠速状态下不同工况的车桥振动情况,发现双向堵车,桥梁左右幅荷载完全相同的工况下,对桥梁的危害最大,因为该工况下桥梁的第三竖弯振型的振动的自振频率在汽车的发动机转动频率范围内。
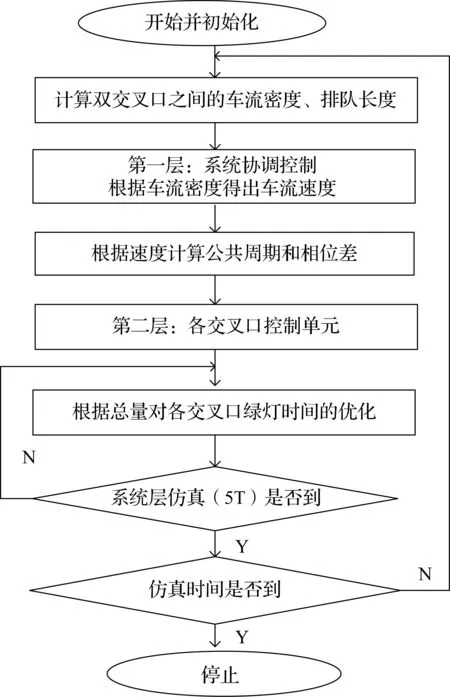
图1 信号协调模糊控制总体算法Fig.1 General signal coordination fuzzy control algorithm
故而,针对城镇桥梁,在两端引入交叉口后,在小汽车组成的车辆拥堵状况下,只有通过信号协调控制,才能有效缓解车辆拥堵而引起的共振隐患,以及其他对桥梁结构的破坏。为了更有效缓解桥梁的交通流,保证桥梁的安全,简单的单点定时控制方法不能满足实时动态变化的交通流。需要利用智能控制来解决交通系统的随机性和复杂性。自Pappi等[5]首先提出第一个城市单交叉口两相位信号模糊控制方法,仿真表明此种控制算法比传统的控制算法减少车辆延误7%左右[6],自此,很多学者依此展开研究,发现模糊控制相对于其他控制方法,能够有效地降低车辆延误等,从而达到缓解交通拥堵的目的。
1 交通信号模糊控制
1.1 模糊控制原理
模糊控制,即采用模糊数学理论的控制方法。由于交通系统是一个随机的、复杂的、动态的系统,无法用简单的静态的变量去衡量,因此,采用模糊控制,无需建立精确的数学模型,通过模糊化、模糊推理和去模糊的过程,将精确的问题模糊化后进行模糊推理,再输出精确量,从而解决复杂的动态实时问题[7]。
1.2 两级模糊控制
两级模糊控制,即系统层模糊控制和独立交叉口层模糊控制,模糊控制系统层可以有效协调交叉口之间的周期、相位差等参数,而通过独立交叉口层模糊控制,可实现不同交叉口需要实现的功能。由于城市干道协调控制中,保持一定时间内的稳定周期,有利于提高交通运行效率,故而,此处系统层模糊控制选5个周期为一个时间段作为优化间隔,即交叉口运行5个周期以后,对周期进行一次系统层的模糊控制,以适应动态交通流,实现动态控制[8]。具体的两级模糊控制如图1。
2 基于总量控制的桥梁交叉口交通信号协调模糊控制
2.1 总量控制原理
为了疏导高峰时期的交通流,缓解车辆拥堵对桥梁交通的影响,采取了信号协调控制的思想。但通常的信号协调控制方法没有充分考虑桥梁的安全。故,在此基础上,基于桥梁本身的承载力,提出总量控制的策略进行优化,并采用最大排队长度作为优化评价参数。总量的确定与桥梁的长度以及车头间距有关。


在桥梁两端交叉口信号控制时,控制桥梁上的排队长度在桥梁安全承受范围内,即总量。尽可能使桥梁上不出现排队现象,减少桥梁上车辆二次或多次停车排队的振动造成对桥梁的影响[9]。同时,通过总量控制的方法,结合不断变化的实时交通流,不断调节信号周期,提高交叉口的通行能力,减少交叉口的延误。
2.2 系统层模糊控制器的设计
双交叉口的协调控制,主要参数为相位差、周期和绿信比[10]。而在干线双向绿波控制中,根据绿波效应有:
T=mod(2D/nv),
式中,T为周期,s;D为两交叉口之间的距离,m;v为交叉口之间的路段上车辆的平均车速,m/s。根据上式,相位差为td=D/v。
公共周期与两个交叉口的交通状况有关,交通量越大,需要的周期就越大。综合考虑相位差、车速和周期之间的关系,对街口大桥两端交叉口的周期设置原则为:
①T=mod(2D/nv);
②60 s≤T≤160 s;
③交通量越大,周期要求越大。现假设当v≥9 m/s时,T≤100 s;当v≤9 m/s时,T≥100 s;
④如果v≤5 m/s,则T=160 s;如果v≥15 m/s,则表明了交通量十分少,行驶通畅,这种情况下,使T=60 s。
当周期确定以后,在对各交叉口的相位设计时,需要根据主干道方向设计相序,使得绿波控制的效果更优。
2.2.1 系统层模糊控制器的输入输出
单输入:桥梁两端交叉口之间的车流密度K,单位为辆。变量范围为(0,N),N为总量控制对应的总量。对应的基本论域为(0,20),对应的模糊子集为(很稀,稀,较稀,适中,较稠,稠,很愁),简单记为(K1,K2,K3,K4,K5,K6,K7)。
单输出:桥梁上的平均车速V,单位为km/h。变量范围是(0,Vmax),对应论域为(0,30),对应的模糊子集为(很慢,慢,较慢,中速,较快,快,很快),简单记为(V1,V2,V3,V4,V5,V6,V7)。Vmax为桥梁上最大行驶速度。
输入输出参数比例因子选为1∶2,输入K和输出V的隶属度函数的选取为三角形波形隶属度函数[8-9]。
2.2.2 系统层模糊控制规则
根据交通参数对应的物理意义,总结出7条规则。如表1所示。

表1 系统模糊控制规则
2.3 独立交叉口绿灯时间优化的模糊控制器的设计
在对桥梁两端交叉口采用模糊控制时,应根据总量原则,分析引起桥梁拥堵的最主要流向,进而对该流向车流进入总量控制路段与离开总量控制路段同时进行优化。从而对进入控制路段的相位和离开控制路段的相位进行动态模糊控制。
2.3.1 桥西交叉口的模糊控制器设计
①单输入量
主要相位的绿灯时间的排队长度GL,单位为辆。变量范围为(0,N-P)。基本论域为(0,10),对应的模糊子集为(很短,短,较短,适中,较长,长,很长),简单记为(GL1,GL2,GL3,GL4,GL5,GL6,GL7)。其中P为主要相位红灯期间增加的排队长度,单位为辆。由于该相位红灯期间增加的排队长度主要来源于上游交叉口,即桥东交叉口北进口,故而P主要取决于上游交叉口的车辆到达率。
②输出量
主要相位的绿灯增量ΔWG1,单位为s。范围是(0,WGmax-WGmin),其中,WGmin和WGmax桥西交叉口主要控制相位的最小绿灯时间和最大绿灯时间,基本论域为(0,10),定义7个模糊子集,为(零,很短,短,中等,较长,长,很长),简单记为(ΔWG1,ΔWG2,ΔWG3,ΔWG4,ΔWG5,ΔWG6,ΔWG7)。同理可以得出其模糊控制的规则为表2。

表2 桥西交叉口模糊控制规则
2.3.2 桥东交叉口的模糊控制器设计
①双输入量
总量控制路段的排队长度L,范围(0,N);N为总量,即单车道最大排队长度。基本论域为(0,10),对应的模糊子集为(很短,短,较短,适中,较长,长,很长),简单记为(L1,L2,L3,L4,L5,L6,L7)。
桥东交叉口主要控制相位的绿灯排队车辆EGL,范围(0,X),X根据该进口道离上一个交叉口的长度来确定。基本论域为(0,10),对应模糊子集为(很短,短,较短,适中,较长,长,很长),简单记为(EGL1,EGL2,EGL3,EGL4,EGL5,EGL6,EGL7)。
②输出量
主要控制相位的绿灯时间增量ΔEG。范围(0,EGmax-EGmin),其中,EGmin和EGmax桥东交叉口主要控制相位的最小绿灯时间和最大绿灯时间,基本论域为(0,10),定义7个模糊子集,为(很短,短,较短,中等,较长,长,很长),简单记为(ΔEG1,ΔEG2,ΔEG3,ΔEG4,ΔEG5,ΔEG6,ΔEG7)。
根据总量控制原理,其控制规则如表3,规则示意图如图2。

表3 桥东交叉口模糊控制规则

图2 桥东交叉口模糊控制规则图
Fig.2 East intersection fuzzy control rules
2.4 评价指标
为了评价模糊控制的效果,根据主要控制目标,即桥梁上的车辆总量,故而采取评价参数最大排队长度为主要评价指标。即在桥梁上设置检测器,在仿真过程中获取检测出桥梁上的最大排队长度,以此判断桥梁上的总量控制效果。
3 案例分析
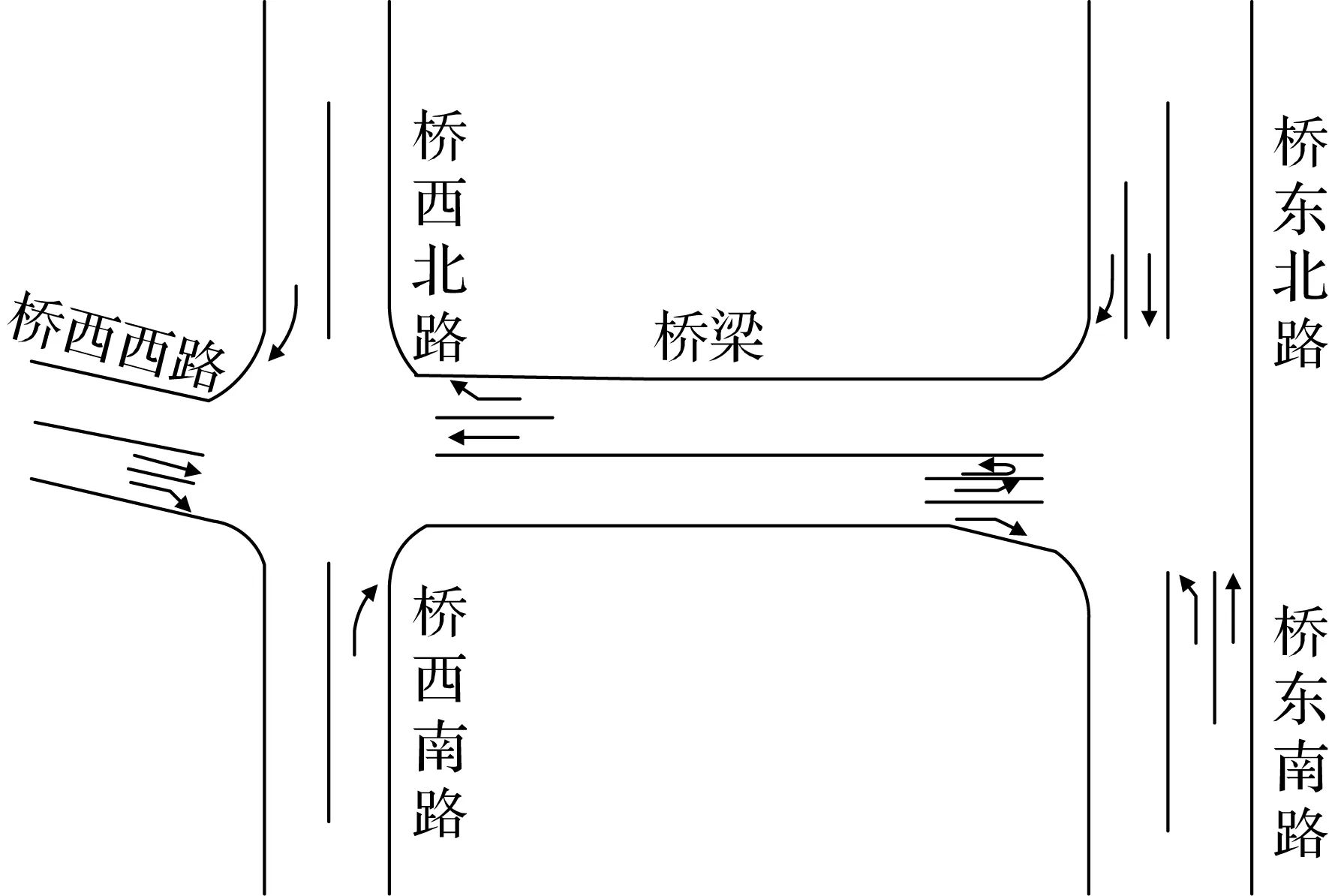
图3 桥梁交通组织图Fig.3 Traffic organization
本文以广州某城市桥梁及其桥头交叉口作为研究对象,桥梁及其两端交叉口示意图如图3。根据实际调查数据,对其进行道路组织优化和信号协调模糊控制。城市作为连接新老城区最重要和最方便的主要干道,其通行率对整个城市交通运行有着巨大影响。该桥梁道路为双向两车道,两侧设有非机动车道,且机非分离,桥上车辆禁止大客车、货车通行,且车辆限速为30 km/h。该桥梁两端的现状为无信号控制,桥梁两端交叉口间距为380 m。
分析桥梁两端交叉口的流量、流向,首先对桥梁两端交叉口进行相位设计,以便于信号模糊控制。桥梁两端的交叉口的信号联动相位设计如图4和图5。
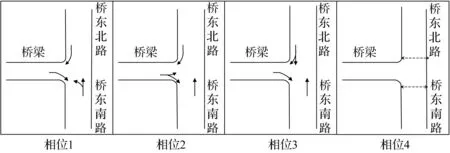
图4 桥东交叉口相位图

图5 桥西交叉口相位图
桥西交叉口相位2的加粗虚线箭头代表了非机动车的运行相位,使得北进口非机动车通过西进口直行上桥,从而避免非机动车逆行影响东西直行的车辆。这种方式可以有效缓解城镇交通非机动车流量大,运行混乱的现状。
分析桥梁的交通流特征发现,自西向东的下桥交通流主要流向为右转,而为了快速疏导桥上的交通流,桥东交叉口对应的该进口道右转不受信号控制;自东向西的交通流主要来源于桥东交叉口南进口左转,故而桥东交叉口的主要控制对象对南进口,而桥西控制对象主要东进口。
通过实际调查分析可知,该桥梁两端交叉口的平均车头间距为6.5 m,故而总量控制时的总量取单车道58辆。对于桥西交叉口的绿灯时间优化的模糊控制中,主要相位红灯期间增加的排队长度P,为桥东交叉口北进口右转车流,则P的确定取决于该右转车流在红灯时间的到达率。桥东交叉口的信号优化的模糊控制中,X为桥东交叉口南进口的最大排队长度,根据调查数据,可知单车道取50辆。
为精确分析桥梁两端交叉口模糊控制的效果,分别按照现状,普通信号控制联动方案和模糊控制的信号协调方案,利用MATLAB的模糊控制工具箱与VISSIM进行了计算机仿真,并通过交叉口间的最大排队长度的性能指标,反映方案的实施效果。对高峰期、平峰期和低峰期分别进行模糊控制、定时控制和普通联动控制。设主要控制方向的车流为非主要控制车流的2倍。并选择最大排队车辆数为评价参数进行评价。

表4 主要控制方向不同时段交通到达率
根据流量以及交叉口的道路几何参数,对不同时段的现状、普通信号联动控制和交通信号协调模糊控制分别仿真,作为总量控制车道的桥梁上最大排队车辆数如表5。

表5 仿真结果对比
4 结 语
本文在模糊控制时以总量为控制原则,有效的两级模糊控制来实现动态控制。在采用两级的模糊控制中,系统层和独立交叉口均采用了联动控制的思想,该方法比传统的两级模糊控制对桥梁交通控制更加适用。通过仿真分析可以发现,在高峰时段,基于总量控制的信号协调模糊控制以及普通信号联动控制方案均能降低桥梁上的排队车辆数,使桥梁上的车辆由溢出现象转变为总量范围内。但是,基于总量控制的信号协调模糊控制的效率更高,相比普通信号联动控制,其效率提高了16.1%。该方法以桥梁安全为主要控制变量,在对桥梁两端的信号控制绿灯时间参数优化时,最大程度的保护了跨桥梁的出行利益,从一定程度上也损伤了非跨桥梁出行者的出行利益。
[1] 方宝君,孙忠强,岳宏亮,等.车辆拥堵对桥梁受力性能影响研究[J]. 江西建材,2016(9):178-179.
[2] 韦立林,王文宁,王建军.简支梁桥荷载试验横向分布系数分析方法[J]. 广西大学学报(自然科学版),2007,32(2):183-185.
[3] 胡益良.拥堵车辆怠速作用对城市桥梁的动力影响分析[J]. 科学技术与工程,2014,14(21):288-292.
[4] 莫增模.拥堵状态下城市桥梁与汽车的共振分析[D]. 华南理工大学,2014.
[5] XU Xun-qian, MA Ye-yuan, WU Guo-qing, et al.Dynamic response of the steel bridge deck thin surfacing due to vehicle load[J]. Advanced Materials Research, 2011, 156-157: 677-680.
[6] YANG W, ZHANG L, HE Z.et al.Optimized two-stage fuzzy control for urban traffic signals at isolated intersection and Paramics simulation[C]// Proceedings of the 15th International IEEE Conference on Intelligent Transportation Systems (ITSC’12). Anchorage, Alaska, USA,:View at Publisher·View at Google Scholar,2012:391-396.
[7] 赵玲玲.基于模糊控制技术的智能交通设计[D]. 浙江理工大学,2014.
[8] 杨阳.城市干线交通信号协调控制方法分析与研究[D]. 西南交通大学,2013.
[9] MA W, GENG D,YAN Y.Multi-phase fuzzy control of single intersection in traffic system based on genetic algorithm[J].International Journal of Innovative Computing Information and Control, 2012,8(5):3387-3397.
[10]郭建钢,陈必太,黄海南,等.桥梁两端交叉口不同控制方式效果的比较[J]. 福建农林大学学报(自然科学版),2014,43(5):556-560.
(责任编辑 唐汉民 梁碧芬)
Coordinated fuzzy control of traffic signal based on total quantity control for city bridge
CHEN Jun, WENG Xiao-xiong
(School of Civil Engineering and Transportation in South China University of Technology, Guangzhou 510640, China)
To improve the intersections’ capacity, reduce the queue on the bridge, and decrease the damage to the bridge from vehicle jams, a total quantity control method is proposed in the paper. According to the maximum vehicle capacity of bridge, it manages the intersections with real-time and coordinated fuzzy control of signal, taking the maximum queue length as the evaluation indicator. The results of MATLAB and VISSIM simulation show that the maximum queue length can be decreased from overflow to 25.1 PCU. The presented method can enhance the capacity and efficiency of intersections’ traffic, and reduce the effect of bridge traffic congestion to the safety of bridge.
bridge traffic; total control; arterial coordination control; fuzzy control
2016-03-22;
2016-04-29
国家自然科学基金资助项目(51308227)
翁小雄(1958—),女,浙江杭州人,华南理工大学教授,博导;E-mail:ctxxweng@scut.edu.cn。
陈俊,翁小雄.基于总量控制的城镇桥梁信号协调模糊控制[J].广西大学学报(自然科学版),2016,41(5):1531-1537.
10.13624/j.cnki.issn.1001-7445.2016.1531
U121
A
1001-7445(2016)05-1531-07
