电动轮汽车电液复合ABS控制的联合仿真
2016-11-12张厚忠江浩斌袁朝春汪若尘
张厚忠,江浩斌,袁朝春,汪若尘,苏 健
(江苏大学汽车工程研究院, 江苏镇江212013)
电动轮汽车电液复合ABS控制的联合仿真
张厚忠,江浩斌,袁朝春,汪若尘,苏 健
(江苏大学汽车工程研究院, 江苏镇江212013)
针对传统纯液压防抱死制动系统(Anti-lock braking system,简称ABS)振动噪声较大和在低附着路面上易引发车轮抱死等问题,鉴于电机制动与液压制动在特性上互补,从充分运用电机制动提升电动轮汽车ABS性能出发,提出一种用于电动轮汽车的新型电液复合ABS系统。由于电液复合ABS是一个“由两控制变量去实现同一控制目标的系统,是一个存在控制冗余且时变耦合的系统”,为此,首先提出了电液复合ABS控制方法的设计原则及其新的系统结构;然后分析电液两制动的各自调节方式及其组合,并对防抱制动全过程从电液调节组合调控滑移率性能方面进行研究,找到最佳的制动调节组合构成防抱制动全过程;最后利用ADAMS软件和MATLAB软件分别建立电动轮汽车的整车机械动力学模型和整车控制模型,通过联合仿真验证控制方法的效果。结果表明:该控制方法能够更加精确的调控车轮滑移率,使其长时间处于最佳滑移率附近,制动距离降低11%以上,有效提升了ABS的性能,证明所提出的电动轮汽车电液复合ABS的系统结构和控制方法合理高效,可应用于对开路面或对接路面上对电液复合ABS整车控制方法进行理论研究、仿真试验以及实用化探索。
电动轮汽车;电液复合ABS;联合仿真;协调控制
0 引 言
电机再生制动就是利用电机将部分制动能量转化为电能,回收至动力蓄电池中[1]再利用,是混合动力汽车(HEV)、纯电动汽车(EV)节约能源、提高续驶里程的重要措施之一[2]。由于HEV、EV等有电机参与驱动的车辆,具有进行再生制动的条件[3],因此由液压防抱死制动系统(Anti-lock braking system,简称ABS)与电机制动构成的电液复合制动系统是HEV、EV制动系统的必然选择之一[4]。液压ABS能够在任何车速下液压制动都能产生足够大的制动力矩,但由于一般采用粗放型三模式(增压、减压和保压)控制,存在无法精确控制制动液压,从而导致制动力矩无法精确控制、制动过程中响应存在较长延迟、制动能量无法回收等问题,而电机制动虽提供的制动力矩不足,但拥有响应迅速、制动力矩控制精确,可精确到±1 N·m,制动能量可回收有利于节能环保;当滑移率较大,即车轮趋于抱死时,电机可输出驱动力矩迫使车轮快速脱离即将抱死状态,防止抱死情况的发生等优点。通过以上分析可知,液压制动与电机制动存在良好的互补性。
目前国内外对四轮毂电机轮边驱动汽车(简称电动轮汽车)的电液复合ABS控制系统进行了广泛研究,已经取得了一定的研究成果,将其应用于电动汽车上获得了理想的制动性能与能量回收效果[5-6],协调控制策略是电液复合ABS研究的核心,能量回收率的高低、制动性能的优劣很大程度上依赖于协调控制策略[7-9]。由于电动轮汽车具有两套完全独立且完整的液压制动和电机制动系统,如能利用液压制动和电机制动良好的互补性,在ABS控制中合理利用电机制动的优点去弥补液压制动的缺点,将是提升电动轮汽车ABS性能的一条新途径。
因此,本文以电动轮汽车为研究对象,以充分利用电机制动/驱动提升ABS性能为研究目标,对电液复合ABS的系统结构和控制方法进行研究。为了检验电液复合ABS控制方法的效果,本文利用MATLAB/Simulink软件搭建控制模型,ADAMS/View软件搭建整车动力学模型,进行联合仿真以验证电液复合ABS控制方法的有效性。
1 电动轮汽车电液复合ABS系统组成与原理
1.1 电液复合ABS控制方法的设计原则
电液复合ABS是由两个特性各异的控制变量(电机制动与液压制动)去实现同一个控制目标(使各个车轮的车轮滑移率保持在15%~20%附近)的系统,因此电液复合ABS是一个存在控制冗余且时变耦合的系统。为了解决控制冗余及耦合问题,需对电机制动和液压制动进行协调控制。首先使两者能互不干涉地共同工作,然后充分利用电机制动和液压制动两者各自的优点,以提高电液复合ABS的性能。根据分析可以将电液复合ABS控制方法分为三类(如图1所示), 每类电液复合ABS控制方法的协调难度与控制效果都是不同的。综合考虑各类方法的协调难度与控制效果,电液复合ABS控制方法采用同一控制方法不同控制参数为最佳。因此,将其作为电液复合ABS控制方法的总体设计原则。
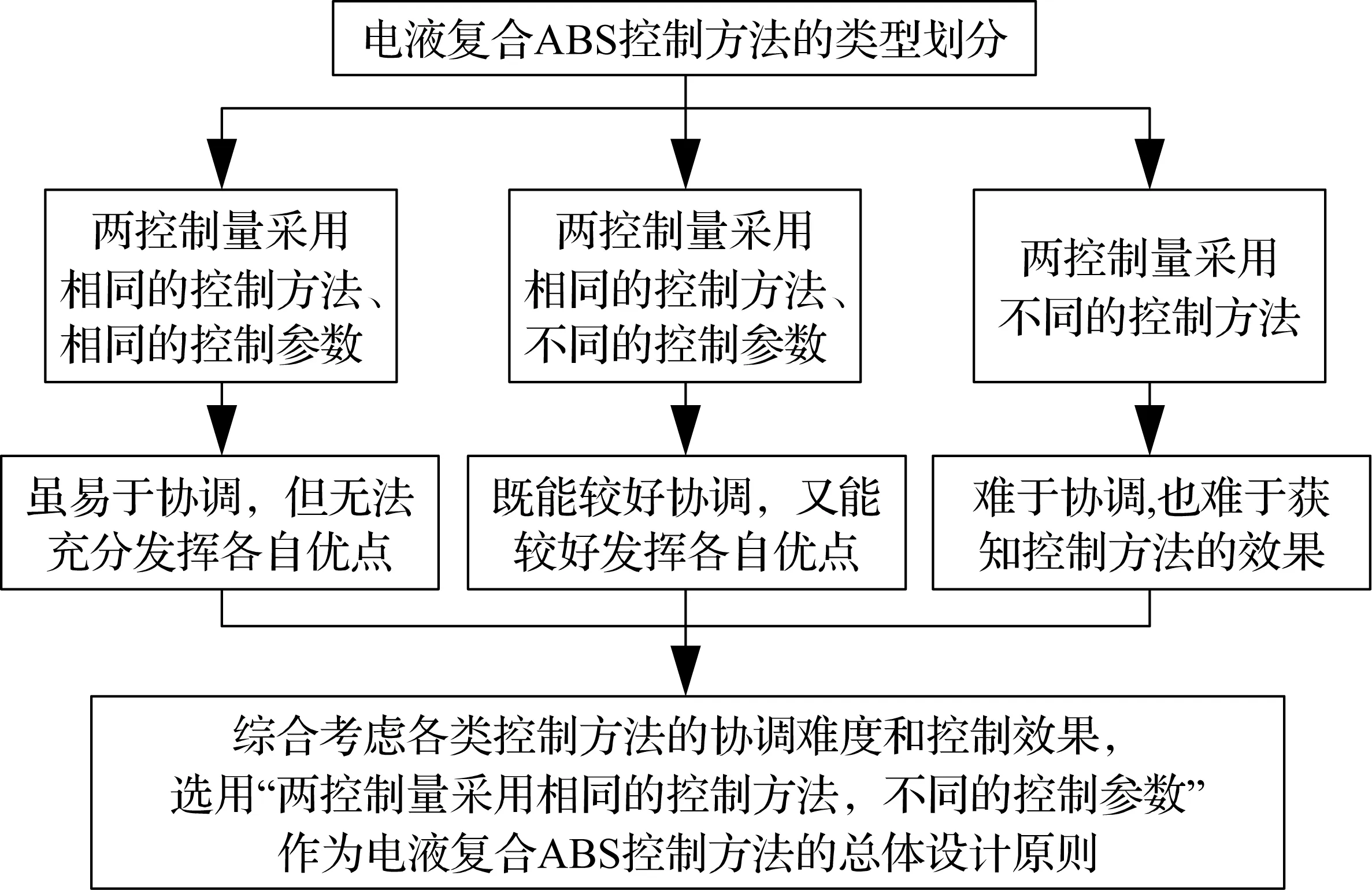
图1 电液复合防抱死制动系统(ABS)控制方法的设计原则
1.2 电动轮汽车电液复合ABS系统结构设计
为了实现在简化结构、节省成本的前提下提高系统的可靠性,电动轮汽车电液复合ABS在单个车轮上的复合方式设计为:在原液压ABS的基础上,将轮毂电机的制动/驱动力矩与液压制动力矩直接在各车轮上进行线性叠加,叠加后一起组成总制动力矩。
同时,为了充分发挥电机制动的优点,电动轮汽车电液复合ABS在整车上复合方式设计为:液压制动系统前轴采用前轮独立控制,后轴采用低选联合控制的整车布置方式。此布置方式有利于前轴充分利用路面附着系数,缩短制动距离,后轴虽不能充分利用路面附着系数,但可以大大提高了制动时整车的方向稳定性。电机制动系统采用四轮独立控制整车布置方式(如图2所示)。
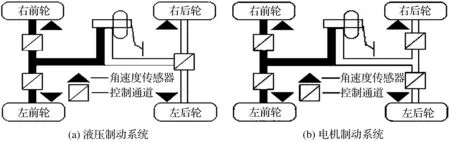
图2 电动轮汽车电液复合ABS整车布置方式
1.3 防抱制动力矩的电液复合调节方式
本文提出的电液复合ABS中的液压制动系统将不做任何改动,且控制目标也与传统液压ABS相同,所以该电液复合ABS中的总制动力矩调节模式与传统纯液压ABS一样,分为增压、保压和减压三种调节,且其各调节阶段的划分以液压ABS为准。在整个紧急制动过程中,电液复合ABS不停地循环“增压→保压→减压→保压”调节直至车速低于10 km/h。
电液复合ABS在整个紧急制动过程中的防抱死调节是由液压制动和电机制动共同完成,由于电机具有制动、自由和驱动三种运行模式,且在制动与驱动运行模式下存在四种主要的调节方式。四种调节方式如下:
①始终最大:在某个液压调节阶段,不随着制动时间变化,电机始终保持最大制动或驱动力矩。
②逐渐增加:在某个液压调节阶段,随着制动时间,电机逐渐增加制动或驱动力矩。
③逐渐减小:在某个液压调节阶段,随着制动时间,电机逐渐减小制动或驱动力矩。
④时大时小:在某个液压调节阶段,不随制动时间有规律地调节制动或驱动力矩。
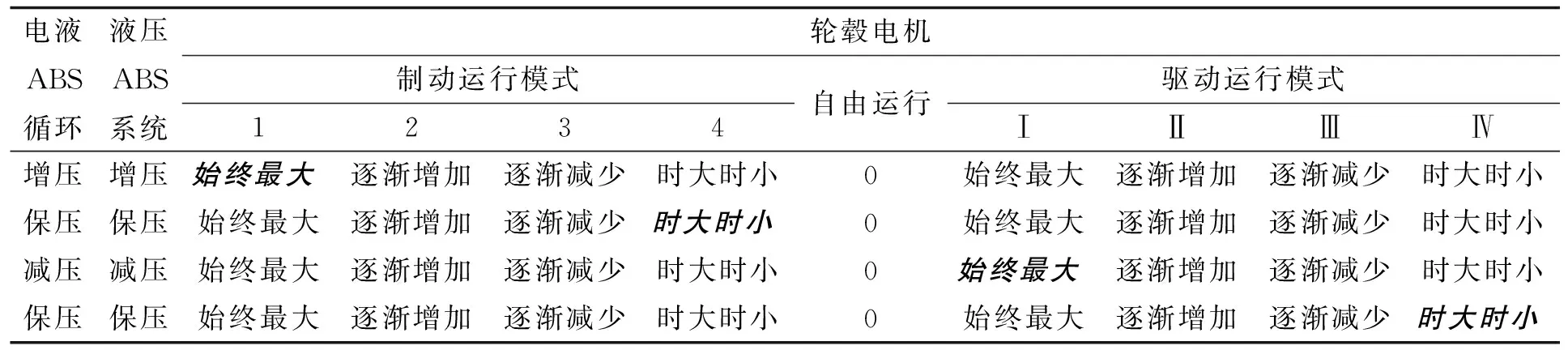
表1 电液复合ABS调节(共36种组合)
在表1中,电液复合ABS存在36种不同的调节状态组合,但存在某些不合理组合,比如:液压ABS增压时,轮毂电机处于驱动运行模式且始终最大,此时液压ABS的调节方向与轮毂电机的调节方向刚好相反,存在明显矛盾等。对各种组合进行分析后,本文采用如表1黑斜体字所示的组合,并对该调节组合进行详细分析,如表2所示。

表2 电液复合ABS调节组合的分析

图3 电液复合ABS总制动力矩调节示意图Fig.3 The total electric-hydraulic ABS braking torque adjustment schematic
该调节方式组合具有以下优点:由于电机制动的作用,电液复合ABS响应时间更快,总制动力矩调节速度更快,调节频率更高,使各个车轮滑移率紧贴于最佳滑移率处,提高路面附着的利用率,缩短制动距离,进而提升ABS的性能;在保压阶段也能对总制动力矩进行快速精确地调节,使各个车轮滑移率波动更小,提升处于最佳滑移率状态的时间,从而减小制动距离。
按照如表2所示的电液复合ABS组合,绘制图3所示的液压制动力矩、电机制动力矩和总制动力矩的相互关系曲线。从图3中可以看出:电液复合ABS与传统液压ABS相比,在增压或减压阶段,制动力矩的增加或减少更迅速,在保压阶段可以通过调节电机制动力矩来调节总制动力矩。
1.4 电液复合ABS控制方法
传统的ABS系统从第一代产品发展到现在,ABS控制方法主要有两种[10]:一种是基于车轮角加、减速度(即逻辑门限值控制),另一种是基于车轮滑移率。前一种控制方式成本低,控制简单,目前的产品大多基于此种方法,但由于缺乏足够的理论依据,且通用性差,需大量试验与车型进行匹配,属于半经验型的控制方式;另一种控制方法是直接以车轮滑移率为控制参数,导致需要通过测量车辆速度或加速度来计算车轮滑移率,虽然在单一路面上制动效果良好,但因其成本高(如要精确测量车速,需安装价格不菲的车速传感器等)且不能适应路面的变化,难以大量实际应用。随着现代控制方法的发展,在以上两种控制方法的基础上,又出现了PID控制(Proportion integration differentiation control)、滑模变结构控制、模糊控制、最优控制和鲁棒控制等ABS控制方法,其实质是对以上两种控制方法的充实或改进,使这两种控制方法能自动调整控制参数来适应不同路面及不同的行驶工况。
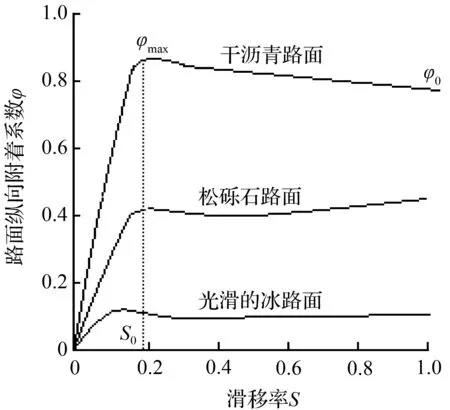
图4 各典型路面滑移率与纵向附着系数的关系Fig.4 A typical relationship between the slip ratio and the road surface adhesion coefficient of longitudinal
电液复合ABS并没有改变汽车制动的动力学本质:外界(主要是路面)在汽车某些部件(主要是轮胎)施加与汽车运动方向相反的力,从而迫使车辆减速或停车。从汽车制动的本质可以看出,影响汽车制动性能的主要有路面、轮胎和路面与轮胎的相对运动关系(即车速与轮胎的相对运动关系,因为车速是以路面为运动参考物)。由于轮胎由车型决定,所以电液复合ABS主要考虑路面和车速与轮胎的相对运动关系(即滑移率)。
基于路面识别算法[11],根据典型的路面试验数据曲线(如图4所示),由路面识别的结果可以估算最佳滑移率S0和路面最大纵向附着系数φmax。
为了充分利用路面附着系数(即可利用到路面最大的纵向附着系数φmax),需满足:
定理1 给定脆弱性变换周期interval和入侵者攻击单个脆弱性所需的时间周期τ(假定攻击不同脆弱性所需的时间周期相同),当脆弱性数量n=1时,入侵成功概率随脆弱性变换空间大小|W|的持续增大而存在极限.
Th+Tm≥φmaxNR,
(1)
式中,Th为液压制动力矩(由估算的液压换算得到);Tm为电机制动力矩;N为车轮垂直载荷;R为车轮滚动半径;φmax为路面最大纵向附着系数。
由于液压ABS不可精确控制液压大小,为了充分利用电机制动力矩可精确控制的优点,必须保证电机制动力矩占总制动力矩的比重,即要求电机有尽可能大的控制裕量, 因此式(1)改写成:
Th+Tm-max≥φmaxNR,
(2)
式中,Tm-max为最大电机制动力矩。
综上所述,本文电液复合ABS控制方法如下:
第1步:当液压制动力矩小于φmaxNR-Tm-max时,液压ABS进入增压,轮毂电机在此阶段中始终处于最大制动力矩状态。
第2步:一旦液压力矩大于φmaxNR-Tm-max,液压ABS进入保压状态。本文采用反比例控制方法,当车轮滑移率在最佳滑移率的左侧时,电机制动力矩随着滑移率减小而增大,否则保持不变;当车轮滑移率在最佳滑移率的右侧时,电机制动力矩随着滑移率增大而减小,否则电机制动力矩不变,使轮毂电机制动力矩则随着滑移率的波动进行快速精准地调节以保持车轮滑移率在最佳滑移率附近。如果当电机制动力矩减少至零时还没能控制住滑移率的增加,此时电机可发送驱动力矩(此方法可进一步增加轮毂电机的控制裕量),进一步减少总制动力矩,迫使车轮快速解除即将抱死状态。
由于液压ABS不能精准地调节液压,所以本文的电液复合ABS中的液压制动系统控制方法为控制制动液压大于或小于某个值(如3 MPa或5 MPa)。实际液压与理论上所需液压的误差则通过电机制动力矩的精准控制来补偿。电机响应越快越准,电机制动/驱动力矩越大,其控制效果越好。
按照电液复合ABS的控制方法,绘制图5所示的电动轮汽车电液复合ABS控制框图。
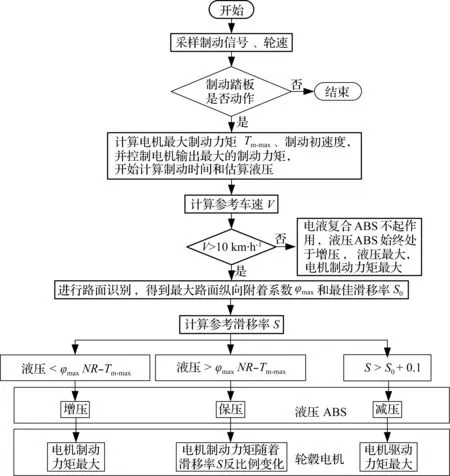
图5 电动轮汽车电液复合ABS控制框图
2 电液复合ABS控制方法的联合仿真
2.1 ADAMS整车机械动力学模型
利用ADAMS/View软件[8],参考某电动轮汽车的满载时车辆结构参数(见表3),搭建如图6所示整车动力学模型[9-10]。试验台架选用的轮毂电机是最大功率7.5 kW的永磁无刷直流电机(由上海电驱动股份有限公司提供)。

表3 电动轮汽车满载时的车辆参数
2.2 路面文件
在ADAMS软件的View模块[8]中,通过改变路面文件中的参数可以设定不同仿真路面的附着系数,从而建立对接、均匀或对开等各种路面。具体方法如下:首先在路面文件中设定若干个网点,目的是将整个路面划分成若干个区域,然后修改各区域的路面附着系数,最后将其导入到整车机械动力学ADAMS/View模型中,即得到了仿真所需的各种路面。本文建立了如图7所示的对接路面,前36 m仿真路面用于驱动车辆达到一定的制动初速度(选取制动初速度为45 km/h),后80 m的低附着系数路面用于紧急制动。

图6 ADAMS整车机械动力学模型
Fig.6 ADAMS mechanical dynamics model of vehicle

图7 联合仿真所采用的路面
Fig.7 Co-simulation used in pavement
2.3 轮胎文件
ADAMS软件中内置有多种轮胎模型,如fiala,UA,Pacejka等轮胎模型。轮胎模型中轮胎的力学特性都集中于轮胎文件[8],因此可以根据轮胎的试验数据修改轮胎文件,从而建立轮胎模型。由于fiala轮胎模型简单且适用于纯滑移工况,本文采用此模型,其模型参数如表4所示。

表4 仿真所用的轮胎模型
2.4 状态变量
ADAMS软件与MATLAB软件进通过状态变量进行通讯[8]。所以在ADAMS搭建的整车动力学模型中,建立27个状态变量,分别为:车身位移、车身减速度、角速度、角减速度、滚动半径、滑移率和车速以及各个车轮电机制动/驱动力矩、液压制动力矩。其中各轮的电机制动/驱动力和液压制动力矩为输入变量,其余均为输出变量。
2.5 MATLAB整车控制模型及仿真试验
在MATLAB/Simulink软件中导入ADAMS/View的整车动力学模型,按照图5所示的控制方法建立MATLAB整车控制模型(如图8所示),并在整车控制模型中加入路面识别算法和轮毂电机模型(如图9所示)。为了更真实地模仿车辆的制动系统,在制动力矩和ADAMS整车动力学模型中添加Simulink的传输延迟模块,设置传输延迟时间为0.02 s,详见图8。

图8 整车控制模型的Simulink示意图
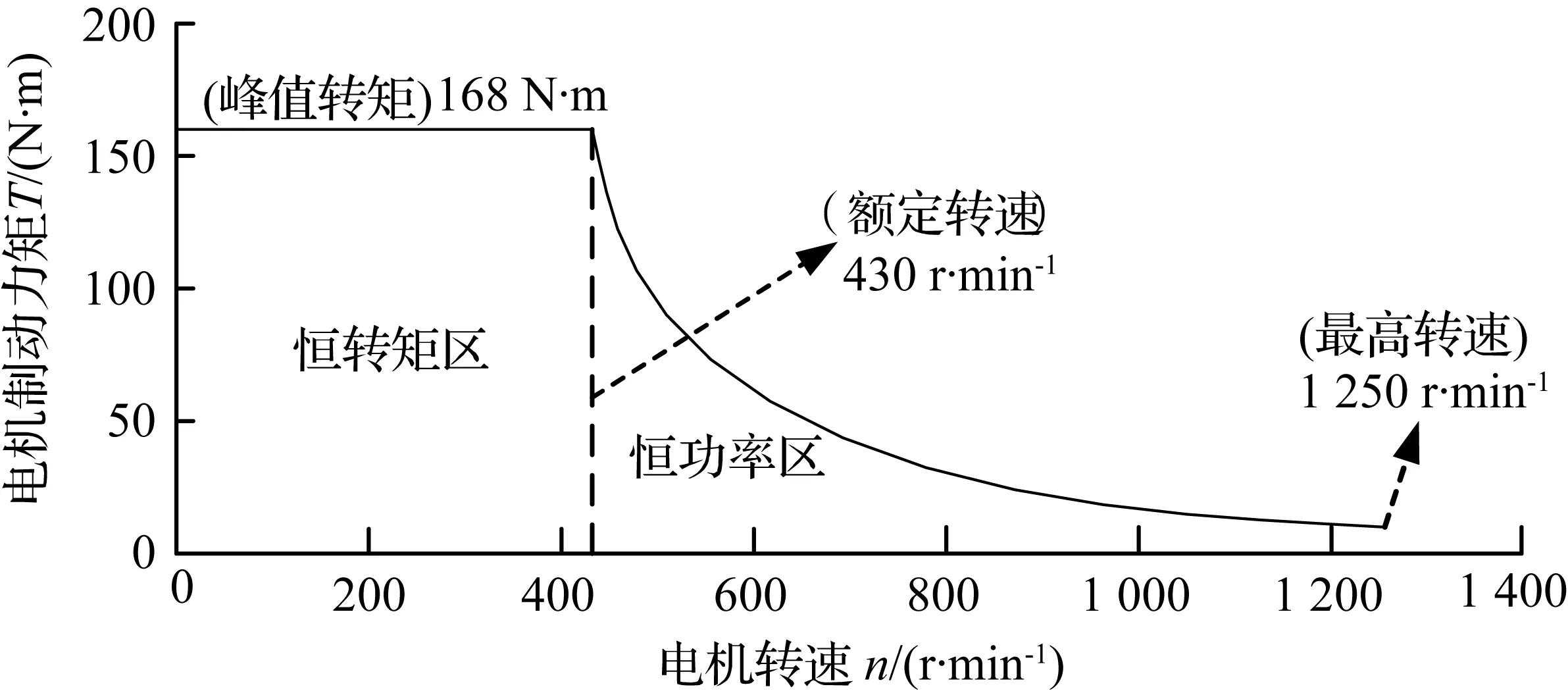
图9 轮毂电机外特性曲线
为了更充分地验证电液复合ABS控制方法的效果,本文分别进行了纯液压ABS仿真与电液复合ABS仿真,两种工况制动初速度均为45 km/h,并进行对比分析。纯液压ABS仿真结果曲线如图10所示,电液复合ABS仿真结果曲线如图11所示,纯液压ABS与电液复合ABS的仿真结果对比如表5所示。

(a) 车速轮速曲线 (b) 滑移率曲线 (c) 制动力矩曲线
图10 纯液压ABS的仿真曲线
Fig.10 Purely hydraulic ABS simulation curve

(a) 车速轮速曲线 (b) 滑移率曲线 (c) 制动力矩曲线

图11 电液复合ABS的仿真曲线
将图10与图11对比后可得,在防抱制动整个过程中,纯液压ABS只有11次调节循环,而电液复合ABS则有23次调节循环;纯液压ABS的车轮滑移率波动较大,而电液复合ABS的车轮滑移率紧贴于最佳滑移率并较小波动。通过表5可得,电液复合ABS与纯液压ABS相比,减少了制动时间和制动距离。虽然减少的制动时间极其有限(减少0.29s),但却大大地减少了制动距离,制动距离降低11%以上。其原因是电液复合ABS控制车轮滑移率更精准,使滑移率在最佳处做小范围的波动,进而充分利用路面的附着力。
4 结 论
通过本文的研究,可得出以下结论:
①本文提出的电液复合ABS的系统结构不仅简单可靠而且充分利用电动轮汽车的优点,并为电液复合ABS控制提供了良好的物理基础。
②在均匀路面上,只要控制参数设置得当,仅调节轮毂电机制动力矩就能保证车轮滑移率最佳,轮毂电机无需输出驱动力矩进一步调节总制动力矩,正如图11(c)所示。
③正由于轮毂电机的动态响应速度与响应精度显著优于液压制动系统,从而电液复合ABS的制动力矩调节频率与调节精度也明显优于液压制动系统,进而使车轮滑移率能长时间紧贴于最佳滑移率,以充分利用路面的附着系数,使制动距离减少11%以上。
④通过仿真结果可知,本文针对电动轮汽车所提出的电液复合ABS的系统结构和控制方法合理有效,可进一步进行实用化探索。
[1] 赵治国,张军腾,吴枭威,等.基于ABS的四驱HEV串联式电液复合制动控制[J]. 中国公路学报,2015,15(11):124-133.
[2] 何仁.汽车制动能量再生方法的探讨[J]. 江苏大学学报(自然科学版),2003,24( 6):1-4.
[3] 盘朝奉,何志刚,张德望.复合电源电动汽车动力系统建模与仿真[J]. 广西大学学报(自然科学版),2012,37(2):285-286.
[4] 刘杨,孙泽昌,王猛.新能源汽车解耦式电液复合制动系统[J]. 中南大学学报(自然科学版),2015,46(3):835-842.
[5] YEO H, KIM H.Hardware-in-the-loop simulation of regenerative braking for a hybrid electric vehicle[J]. Proceedings of the Institution of MechanicalEngineers,Part D: Journal of Automobile Engineering, 2002,26(11):855-864.
[6] WU M C,SHIH M C.Simulated and experimental study of hydraulic anti-lock braking system using sliding-mode PWM control[J]. Mechatronics, 2003, 13(4): 331-351.
[7] 李玉芳,吴炎花.电液复合制动电动汽车制动感觉一致性及实现方法[J]. 中国机械工程,2012,23(4):489-492.
[8] AHN J K, JUNG K H, KIM D H, et al. Analysis of a regenerative braking system for hybrid electric vehicles using an electro-mechanical brake[J]. International Journal of Automotive Technology, 2009, 10(2):229-234.
[9] 何仁,俞剑波,王润才.电动汽车混合制动系统控制策略的改进[J]. 江苏大学学报(自然科学版),2013,34(2):125-130.
[10]程军.汽车防抱死制动系统的理论与实践[M]. 北京:北京理工大学出版社,1999.
[11]张元才,余卓平,徐乐,等.基于制动意图的电动汽车复合制动系统制动力分配策略研究[J]. 汽车工程, 2009, 31(3):244-249.
[12]李军,邢俊文,覃文洁.ADAMS实例教程[M]. 北京:北京理工大学出版社,2002.
[13]左建令.基于四轮驱动电动车的路面识别及驱动防滑研究[D]. 上海:同济大学,2006.
[14]余卓平,熊璐,张立军.电液复合制动匹配研究[J]. 汽车工程, 2005, 27(4): 455-457,462.
[15]王会义,高博.液压式防抱制动系统电磁阀动作响应实验研究[J]. 液压与气动,2001(9):2-4.
(责任编辑 梁 健)
Co-simulation of the electronic-hydraulic anti-braking control system for electric-wheel vehicle
ZHANG Hou-zhong, JIANG Hao-bin, YUAN Chao-chun, WANG Ruo-chen, SU Jian
(Automotive Engineering Research Institute,Jiangsu University, Zhenjiang 212013, China)
Because hydraulic antilock braking system (ABS) might generate noise and vibration and easily causes wheels to be locked on the snow-covered road, and e-motor braking system has good complementarity with the hydraulic braking system, a new electronic-hydraulic hybrid ABS system for electric-wheel vehicle is designed by using the e-motor braking system to improve the performance of ABS. The electronic-hydraulic hybrid ABS is a system that two control variables with different features function together to obtain the same control target, and it is a redundant, coupled and time-variant control system, and also a system that must be dynamically coordinated control on motor brake and hydraulic brake. For this purpose, this paper firstly brings forward the design principle of the electronic-hydraulic hybrid ABS control methods and the new system structure; Secondly analyze the adjustment and combination between electronic braking and hydraulic braking, research the anti-braking process from the aspect of electronic-hydraulic combination to control the performance of slip rate, find the best braking adjustment combination that constitutes the anti-braking process. Finally, via ADAMS and MATLAB software, the automotive mechanical dynamic and control models are constructed respectively and are co-simulated to test validity of control method. Research results show that this control method can more accurately control the wheel slip rate, make it near the optimal slip rate for a long time, reduce braking distance more than 11%, and improve the performance of ABS effectively. Electronic-hydraulic ABS system structure and control method developed in this paper are proved to be reasonable and efficient and can be applied to the theoretical research, simulation test and practical exploration of electronic-hydraulic compound ABS in split and opposite roads.
electric-wheel vehicle; the electronic-hydraulic compound anti-lock braking system; co-simulation; coordinated control
2015-12-15;
2016-08-03
国家自然科学基金青年项目(51305167);江苏省高校自然科学研究面上项目(14KJD580001);江苏大学校基金资助项目(13JDG034);江苏省电动车辆驱动与智能控制重点实验室开放研究课题(JLDICEV20150703)
张厚忠(1978—),男,江西泰和人,江苏大学讲师,博士;E-mail: ujs_aeri_motor@163.com。
张厚忠,江浩斌,袁朝春,等.电动轮汽车电液复合ABS控制的联合仿真[J].广西大学学报(自然科学版),2016,41(5):1358-1367.
10.13624/j.cnki.issn.1001-7445.2016.1358
TH16;U461.6
A
1001-7445(2016)05-1358-10
