悬挂式单轨车辆曲线通过性仿真研究
2016-11-12刘文龙徐延海杨吉忠王孔明
刘文龙,徐延海,2, 杨吉忠,王孔明, 吴 晓
(1.西华大学汽车与交通学院, 四川成都610039;2.汽车测控与安全四川省重点实验室, 四川成都610039;3.中国中铁二院工程集团有限责任公司, 四川成都610031)
悬挂式单轨车辆曲线通过性仿真研究
刘文龙1,徐延海1,2, 杨吉忠3,王孔明3, 吴 晓3
(1.西华大学汽车与交通学院, 四川成都610039;2.汽车测控与安全四川省重点实验室, 四川成都610039;3.中国中铁二院工程集团有限责任公司, 四川成都610031)
针对悬挂式单轨车辆曲线运行平稳性和舒适性容易受到线路设计因素影响的特点,采用虚拟样机仿真平台对其曲线通过性进行了研究。首先,较系统的分析了悬挂式单轨车辆的结构及其特点;在此基础上建立了模拟悬挂式单轨车辆橡胶轮胎的轮胎模型;然后,参照悬挂式单轨车辆单节完整的拓扑图建立动力学仿真模型;最后,进行了典型工况下的悬挂式单轨车辆的仿真分析。结果显示,在曲线通过安全限速内,导向轮受力随着车辆速度的增加几乎呈线型增长;而随着曲线轨道距离的增大导向轮径向受力基本保持不变。不同曲线半径工况下,曲线通过平稳性预测结果:垂向平稳性指标最大值为2.24,横向平稳性指标最大值为2.15,二者数值均在我国国家标准《铁道车辆动力学性能评定和实验鉴定规范》(GB/T 5599-1985)规定的平稳性等级2.5以内;垂向最大加速度为0.64 m/s2,横向最大加速度为0.45 m/s2,轮重减载率最大值为0.56,均符合国际联盟颁布的《铁路运输国际标准》(UIC 505)规定。表明利用虚拟样机技术仿真平台建立的单轨车辆模型能够较好的应用于车辆的曲线通过性的评价,并能进一步应用于后续运行特性研究当中。
悬挂式单轨车辆 ;车速;轨距;曲线通过性;平稳性
0 引 言
单轨交通系统作为一种新型的城市轨道交通方式,以其本身具有的快捷、安全、经济与环保等较高的适应性特点受到越来越多的关注[1]。单轨交通系统按照车辆行走方式不同,分为跨座式和悬挂式两种类型[1-2]。悬挂式单轨交通以其成本低、工期短、占地面积小、空间适应性强的特点逐渐成为目前及未来阶段城市轨道交通的研究热点。悬挂单轨交通方式可有效解决中小型城市地面交通拥堵问题,国外德国与日本应用较广泛[3-4],国内单轨目前只在重庆和北京开通有跨座式单轨交通系统[5]。由于悬挂式单轨交通系统在国内尚无应用,因此在此种制式单轨交通研究中基本采用动力学软件进行仿真分析,文献[6]运用SIMPACK软件建立车辆动力学模型,仿真分析了车辆的运行品质和曲线通过性能,但是文献中导向轮仅利用2D线线接触模拟,无法真实反映出悬挂式单轨车辆导向轮的橡胶轮胎曲线通过性能。文献[7]运用SIMPACK软件对建模进行了完善,用单边接触力的形式将轮胎模型引入,使导向轮与导向路轨产生作用力,但此种表达导向力方法并不十分准确。文献[8]基于日本湘南江之岛线的悬挂式单轨交通系统,对其进行城市应用可行性研究,虽然做了一系列技术改进,但是并未有涉及到曲线通过性能的分析研究。
基于这些原因,本文利用虚拟仿真平台针对某型悬挂式单轨交通系统的曲线通过性能进行了研究,旨在给出该制式系统中车辆曲线行驶过程曲线限速及轨道距离设计的参考数据,并对新型轨道交通系统动力学性能进行分析预测。
1 悬挂式单轨车辆几何模型
1.1 悬挂式单轨车辆结构及其特点
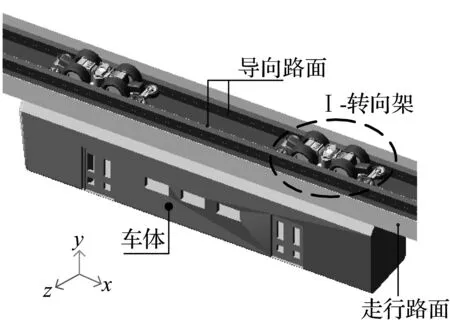
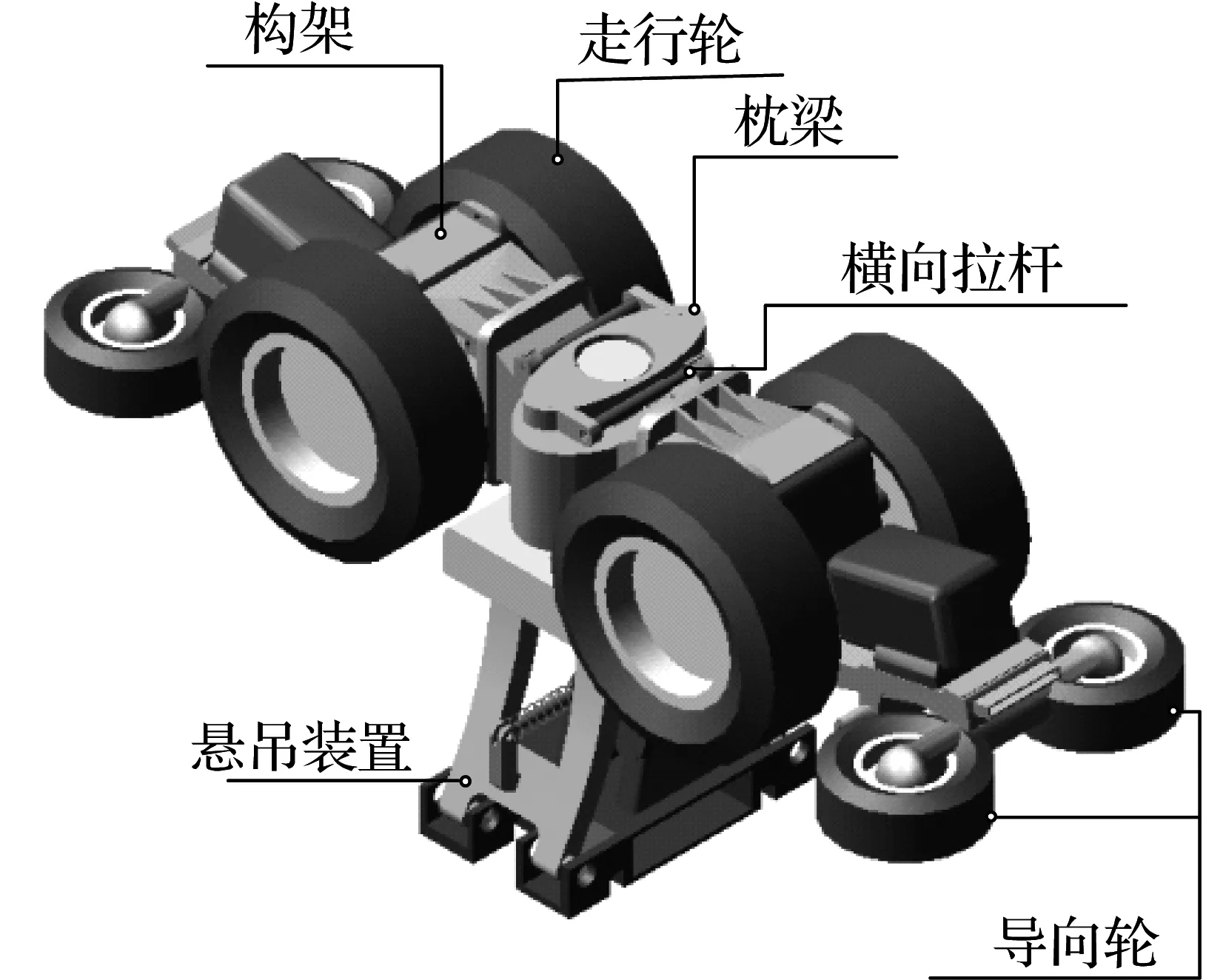
图1给出了一种典型的悬挂式单轨交通系统,主要是由线路和车辆组成。该制式交通系统的转向架结构是其最重要的走行系统,如图2所示。走行轮、导向轮均为充气橡胶轮胎。走行轮采用空心轴焊接在构架上,在车辆运行过程中,走行轮承受垂向力,也提供车辆行驶的纵向力;车辆运行过程中,导向轮只承受横向力,不承受垂向力;空气弹簧主要承受车体的重力,衰减车体的垂向位移;减振器的一端固定在车体顶端的固定座处,一端连接在悬吊装置上,起到组织车体在行走过程中大的横向运动。

图1 悬挂式单轨交通线路及车辆
Fig.1 Suspension monorail transit line and vehicle

图2 悬挂式单轨车辆走行系统
Fig.2 Suspension monorail vehicle line system

图3 曲线通过时车体状态Fig.3 The state of car body of curve through
悬挂式单轨交通系统是一种车体在轨道梁下行走的轨道交通[9-10],由于这种悬挂结构和运行方式的特殊性,当曲线行驶时,在车辆重力、曲线离心力和侧向风的共同作用下,悬挂式单轨车辆会向线路外侧侧滚,如图3所示,在曲线行驶时,乘客会因频繁控制身体不发生倾斜而引起身体疲倦,影响了车辆运行舒适性。因此,曲线通过性能成为判断车辆运行性能的重要指标之一。
1.2 悬挂式单轨车辆基本参数
根据文献[6]提供的结构参数及项目中对悬挂式单轨交通系统功能定位及车辆方案研究报告,确定了适用于国内的悬挂单轨交通系统车辆结构及参数,其中车辆主要参数见表1,车辆及转向架结构如图4所示。

表1 车辆主要技术参数

(a) 车辆结构主视图
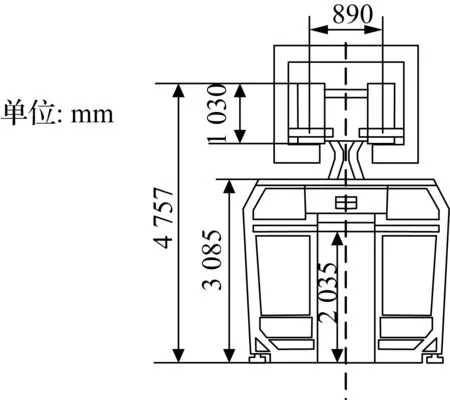
(b) 车辆结构右视图
图4 悬挂式单轨车辆结构图
Fig.4 Suspension monorail vehicle structure
1.3 轨道曲线对悬挂式单轨车辆的影响
车辆曲线通过时主要变化力为:导向轮径向力、走行轮的侧偏力及回正力矩、空气弹簧纵向力,如图5所示(以左转向为例)。悬挂式单轨车辆直线行驶时,由于走行路面没有超高侧和导向轮稳定的作用,单轨车辆直线行驶不存在大的不稳定性及脱离轨道的危险。曲线通过时,悬挂式单轨车辆导向轮作为车辆转向的主要导向机构,它受到来自导向路面反作用的径向力,表现出摇头力矩的行驶控制车辆转向运行。
在不同曲线半径行驶过程中,按照现有轨道车辆通过曲线时相应的曲线限速和缓和曲线设置标准,悬挂式单轨车辆也会因导向轮径向力的大小,表现出不同的曲线通过性能。因此,在整个悬挂式单轨车辆曲线通过性能研究中,导向轮径向力成为曲线通过性能的重要影响因素之一。
另外,悬挂式单轨车辆前、后转向架走向轮侧偏力及空气弹簧纵向力会形成有利转向的摇头力矩,控制车体正常行驶。因为悬挂式单轨车辆走行系统全在轨道梁内,行驶中不会发生脱轨现象,所以在曲线通过性能分析时也把走行轮的轮重减载率作为评判曲线通过性能的指标之一。为控制曲线行驶时侧滚现象的发生,应严格防止两侧导向轮有脱离导向路面的可能。因此,在悬挂式单轨车辆曲线通过性能研究中,导向轮与导向路面之间的轨道距离自然也是影响曲线通过性能的重要研究因素之一。
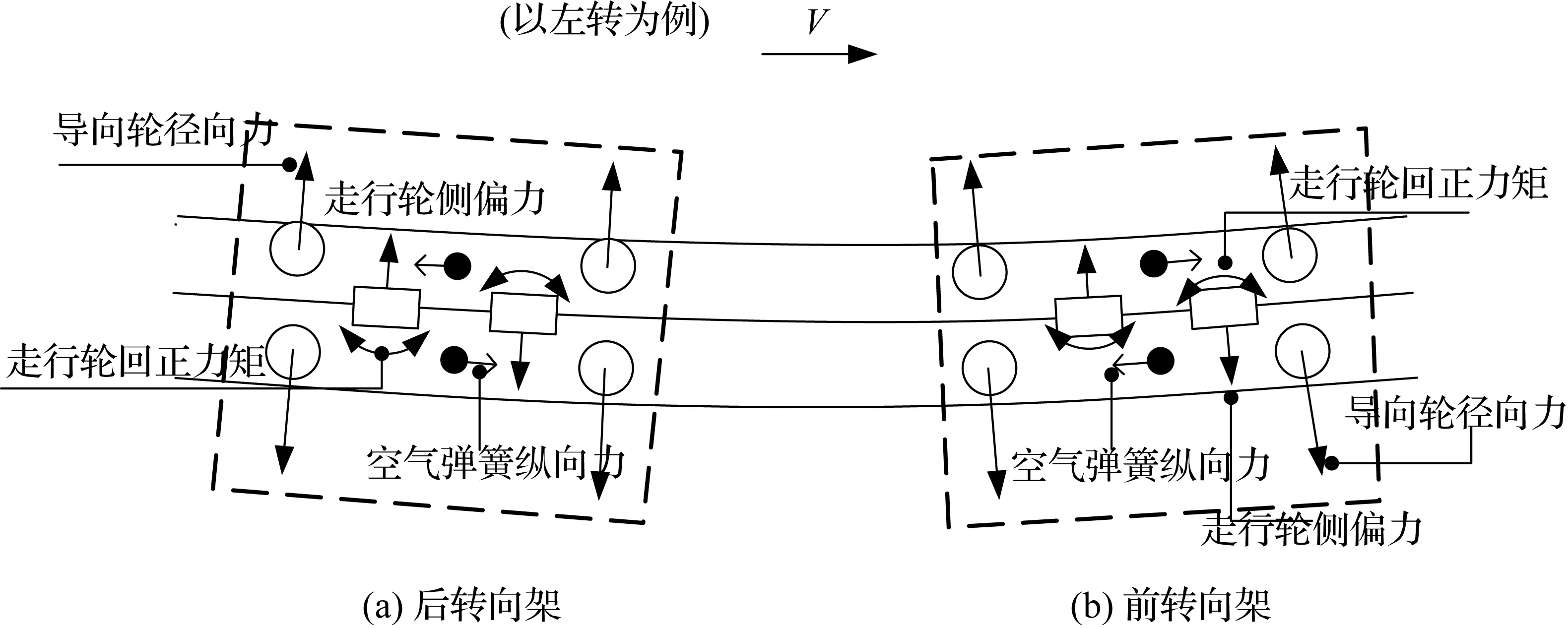
图5 曲线通过时车辆的受力状态
2 悬挂式单轨车辆动力学模型
2.1 悬挂式单轨车辆拓扑构型
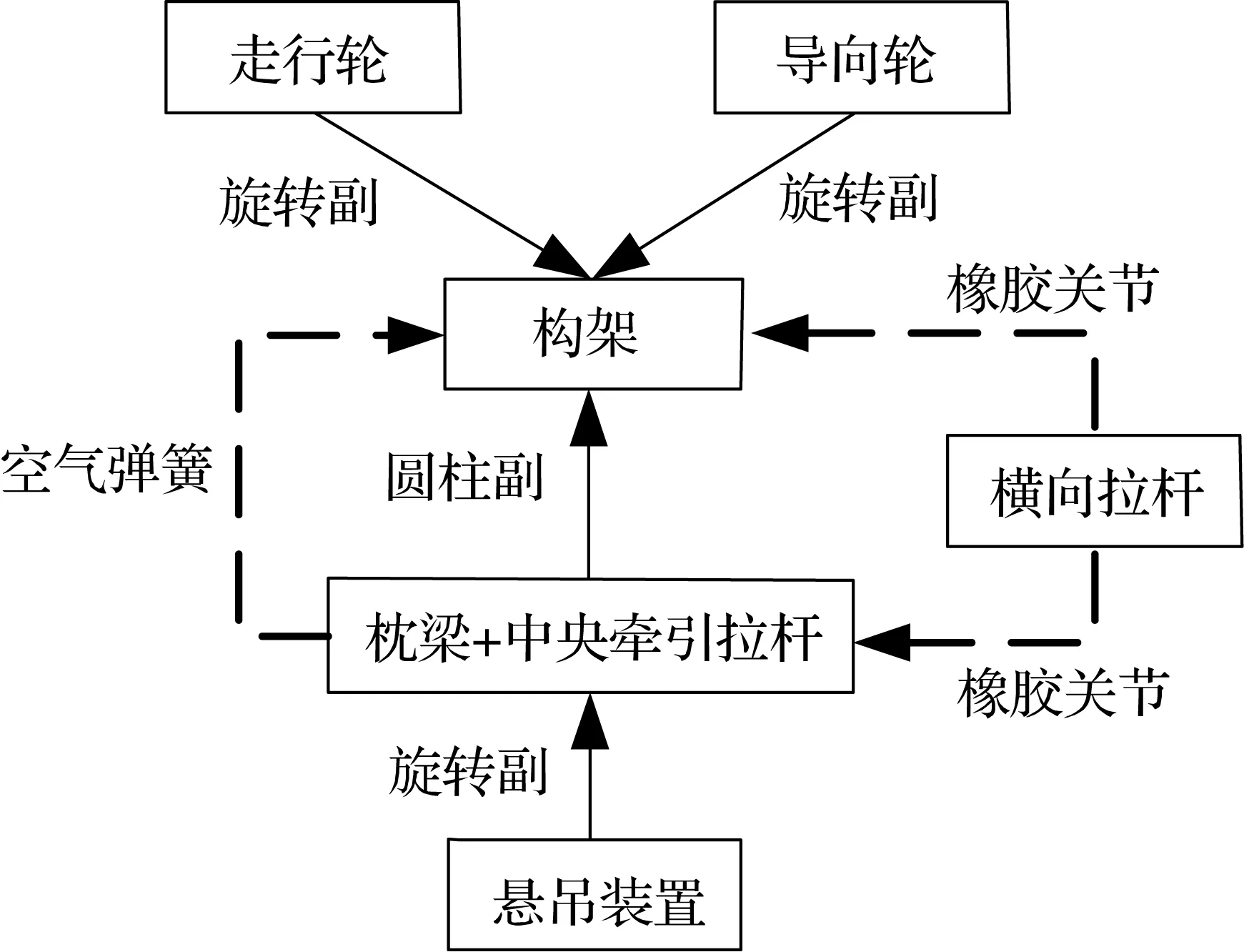
利用虚拟样机技术建立动力学模型时,创建车辆系统的拓扑构型图是准确模拟实物模型的关键。本文以简化建模、方便计算的设计原则,将系统中的弱非线性元素作近似的线性处理。根据悬挂式单轨车辆技术参数(表1)及车辆结构(图4),得到悬挂式单轨车辆单节动力学关系拓扑图,如图6所示。在悬挂式单轨车辆拓扑构型图中,转向架、摇枕、车体分别被定义了 6个自由度,走行轮轮轴、导向轮轮轴、悬吊装置只存在1个转动自由度。单节悬挂式单轨车辆共38个自由度。
2.2 动力学仿真模型
文中在建立悬挂式单轨车辆动力学模型时,首先选择一个参考坐标系。以绝对坐标系中心点为坐标系原点O,以XOZ平面内X轴负方向为车辆走行方向,如图7所示。以此参考坐标系进行转向架构架及其他组成构件的仿真建模。由于转向架构架结构的复杂性,而ADAMS软件中几何建模工具要实现完全建立跟实际外形一样的模型是不现实的。因此,对转向架模型利用外部CAD软件建立对应的三维模型,然后通过ADAMS软件与外部CAD软件的接口功能导入三维模型,并在该模型上加上软件自带的橡胶轮胎模型代替单轨车辆的走行轮和导向轮的橡胶轮胎[11-12],建立悬挂式单轨车辆动力学仿真模型及构件关系图如图7所示,转向架模型及各部件关系图如图8所示。
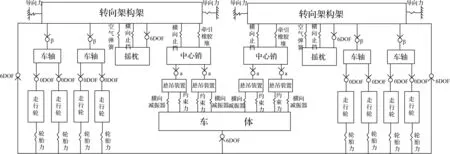
图6 悬挂式单轨车辆拓扑构型

(a) 车辆构件关系图
(b) 车辆动力学仿真模型
图7 车辆构件关系图及动力学仿真模型
Fig.7 The component diagram and the dynamic simulation model of vehicle
(a) 转向架构件关系图
(b) 转向架动力学仿真模型
图8 转向架构件关系图及动力学仿真模型
Fig.8 The component diagram and the dynamic simulation model of bogie frame
本文建模时做了如下假设和主要结构简化替代:
①假设车体、转向架不存在变形,作为质心前后、左右对称的刚体进行建模。
②假设车辆弹性元件均为线特性、粘性阻尼,且建模时考虑整体中心对称。
③空气弹簧的模拟[13]:悬挂式单轨车辆采用空气弹簧连接车体和转向架部分,具有较高的吸收振动进而降低噪音的作用,采用轴套力(Bushing)来代替。
④横向减振器的模拟:横向减振器水平安装在车体和悬吊装置之间,起到改善车体横向运动特性的作用,采用弹簧阻尼力( Spring-Damper)复合力来代替。
2.3 轨道梁表面不平度
悬挂式单轨交通系统中直接与轮胎接触的是钢制轨道梁,因此轨道梁表面不平度是单轨系统中主要考虑的冲击载荷来源。考虑到悬挂式单轨车辆的橡胶轮胎的特点,本文主要参考公路路面不平度的研究。基于统计学中随机变量函数的研究方法进行路面不平度描述[14]。文献[15]给出利用功率谱密度的研究方法来表示路面不平度的计算公式,如式(1):
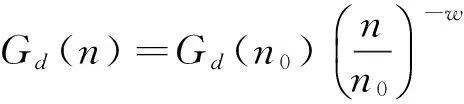
(1)
式中:n为空间频率;n0为参考空间频率,n0=0.1 m-1; Gd(n0)为不平度系数;w为路面谱的频率指数,标准取值w=2。
本文在对悬挂式单轨车辆的动力学模型进行分析时,利用ADAMS软件的3D样条路面来模拟车辆行走过程中的随机路面[16],最能反映路面不平度的空间功率谱密度Gd和Sayers模型中的功率谱密度(PSD)参数也由速度功率谱密度Gv(n)和加速度功率谱密度Ga(n)来补充其不平度特性。它们与空间功率谱密度Gd关系如下所示:
Gv(n)=(2πn)2Gd(n),
(2)
Ga(n)=(2πn)4Gd(n)。
(3)
通过对悬挂式单轨交通系统中的轨道梁特性分析,选择与轨道梁表面不平度近似的A级公路路面来进行仿真研究。在创建三个行驶路面属性文件时,参考路面分级标准分别取Gd=0.1e-6、Gv=0和Ga=0。随机路面模拟图及路面不平度曲线如图9(a)、(b)所示。

(a) A级随机路面模拟图
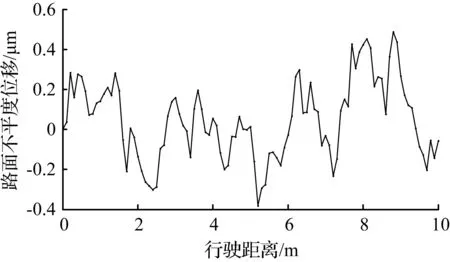
(b) A级路面不平度曲线
图9 A级随机路面及其路面不平度曲线
Fig.9 The random road and roughness curve of grade A
3 轨道线路参数
针对悬挂式单轨车辆曲线通过性能研究时,车辆通过曲线时要考虑离心力[17],通过曲线时轨道梁对单辆车所能提供的最大离心力公式为:

(4)
式中:vmin为最小曲线半径曲线限速;R为最小曲线半径;M3为单辆编组车辆超载工况质量。
控制在曲线上通过的最大限制速度为:
(5)
式中:Fmax为通过曲线时轨道梁对单辆车所能提供的最大离心力;R为曲线半径。
根据我国CJJ96-2003《地铁限界标准》规定,假设车辆在缓和曲线上匀速运动:
(6)
式中:L为缓和曲线长度;R为圆曲线半径;V为车辆通过曲线的运行速度。
综上,本次针对曲线通过性的仿真研究中使用轨道类型及线路参数如表2 和表3所示,曲线段轨距加宽设置为曲线段加宽10 mm、20 mm和30 mm。

表3 曲线线路设置
4 曲线通过性仿真研究
4.1 仿真工况设置
针对本文对曲线通过性能分析研究的目的,根据上节曲线线路类型(如表2、表3所示),本次仿真研究分为4种工况,工况Ⅰ、Ⅱ、Ⅲ和工况Ⅳ的设定如表4所示。

表4 仿真工况
4.2 平稳性测量点设置
在评测车辆平稳性指标时,测量车体垂直和横向加速度的传感器设置在悬挂式单轨车辆乘客区内转向架正上方一侧1 000 mm的B点,为了更准确的对车辆平稳性做出评价,测量点设置增加了驾驶室内的A点,平稳性各测量点的位置和尺寸如图10所示。
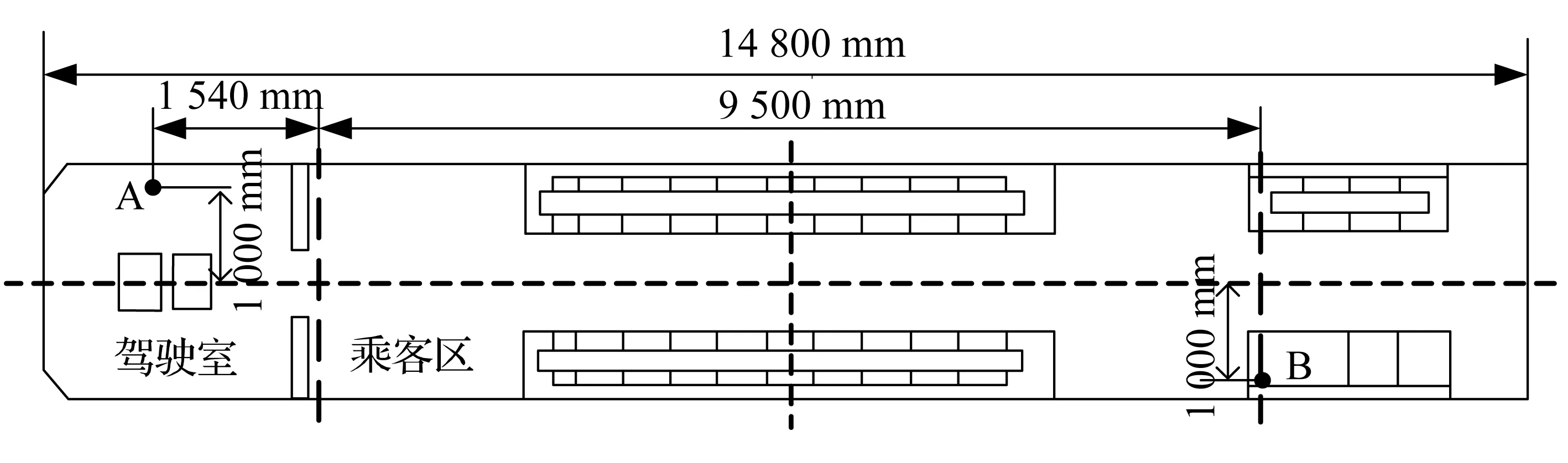
图10 平稳性测量点俯视图
4.3 仿真结果与分析
①工况Ⅰ
将悬挂式单轨车辆仿真模型调整为最初静平衡状态。两侧导向轮与导向路面恰好相切,初始状态不受力。车辆行驶过程中导向轮所受的径向力如图11所示。

(a) 前转向架导向轮径向受力曲线

(b) 后转向架导向轮径向受力曲线
图11 转向架导向轮径向受力曲线
Fig.11 The curve of radical force of leading guide of bogie
从图11(a)、(b)可以看出,车辆曲线转向行驶过程中,车辆前转向架前右、后左导向轮和后转向架前左、后右导向轮起着主要的导向功能;仿真在直线段开始行驶时,导向轮所受的径向力接近等于0 N;而当车辆进行曲线段运行时,它们的受力开始变化,并在曲线段保持不变;当车辆通过曲线段回到直线段行驶时,导向轮受力再次接近0 N 。由理论分析可知,导向轮行驶过程中受力变化与真实情况基本一致,证明仿真模型的正确性及本次仿真结果的可参考性。
因为仿真转向设置为左转曲线行驶,由工况Ⅰ可知曲线行驶过程中,其前转向架前右侧导向轮受力为最大受力值,所以以下工况研究分析时,均以前转向架前右侧导向轮受力值为分析目标。
②工况Ⅱ
前转向架前右侧导向轮受力仿真结果如图12(a)所示,图12(b)为不同行驶速度条件下导向轮受力变化曲线图。由图12(a)、(b)可知,导向轮受力随着车速的增加几乎线性的增大,由此分析为例,在悬挂式单轨交通系统工程实际应用中,车辆曲线行驶速度的限定有了仿真数据的理论参考。

(a) 导向轮径向受力随时间变化曲线

(b) 导向轮径向力随车速变化曲线
图12 导向轮径向受力随时间和车速变化曲线
Fig.12 The curve of radical force of leading guide with time and speed
③工况Ⅲ
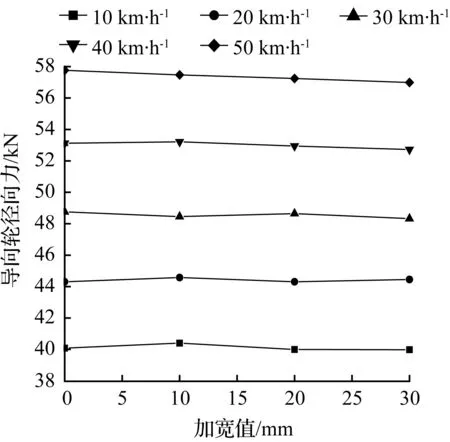
前转向架前右侧导向轮在不同车速和轨距条件下径向受力如图13(a)、(b)所示。分析图13(a)、(b)显示的仿真结果,再次验证同一线路条件下,导向轮径向力随速度的增加而增大的关系;同时,如图13(b)中导向轮径向力在不同加宽值线路的仿真结果显示,同一车速同一轨距条件下,导向轮径向力变化很小,其变化值不足以达到影响车辆行驶中的性能的变化。因此,可以考虑以适当加宽一定量的轨道梁宽度,用来为车辆供电系统的铺设争取更多的空间,也为后期工程检修人员进入轨道梁内部检修留下更多的工作空间。

(a) 不同车速,同一轨距
(b) 同一车速,不同轨距
图13 导向轮径向受力随轨距和车速变化曲线
Fig.13 The curve of radical force of leading guide with gauge and speed
④工况Ⅳ
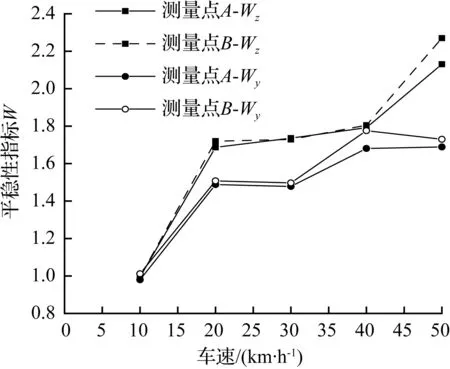
根据仿真线路的设置设定车辆速度变化范围为10~50 km/h,在不同工况下,车辆通过不同的曲线半径时,通过车辆上平稳性测量点A、B两点的垂向平稳性Wz、横向平稳性Wy、垂向最大加速度az与车辆横向最大加速度ay及轮重减载率、导向力最大值的变化,并对悬挂式单轨车辆曲线通过性能进行分析及预测。各参数随曲线半径的变化见图14(a)、(b)和图15(a)、(b)所示。
(a) 平稳性指标
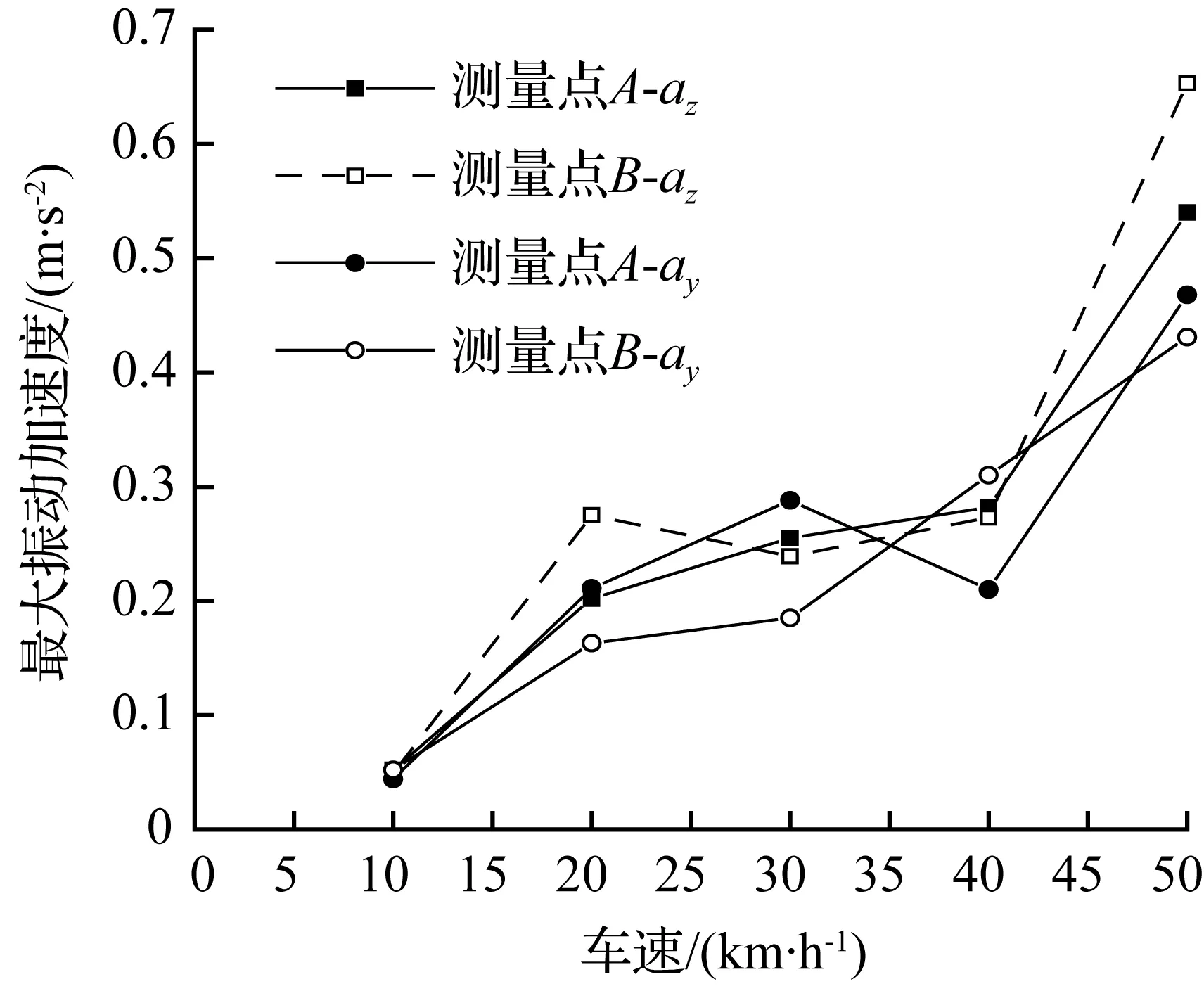
(b) 最大振动加速度
图14 平稳性参数随车辆运行速度变化曲线
Fig.14 Stability parameters change with vehicle speed

(a) 轮重减载率
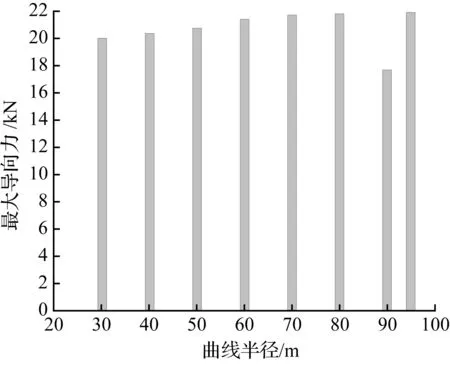
(b) 导向力最大值
图15 曲线性能参数随线路半径变化图
Fig.15 Curve performance parameters with radius variation
分析图14(a)、(b)和图15(a)、(b)可以看出,仿真得到的平稳性指标及最大加速度数值均随车辆运行速度增加逐渐增大;其中,垂向平稳性指标最大值为2.24,横向平稳性指标最大值为2.15,二者数值均在《铁道车辆动力学性能评定和实验鉴定规范》(GB/T 5599-1985)平稳性指数一级数值2.5以内;垂向最大加速度为0.64 m/s2,横向最大加速度为0.45 m/s2,轮重减载率最大值为0.56,均符合国际联盟颁布的《铁路运输国际标准》(UIC 505)规定。在选定的参数范围内,导向力最大值未超过极限值22 kN。
5 结 论
针对悬挂式单轨车辆独特的结构方式和运行特点,对其曲线通过性能进行了研究,并采用不同曲线线路条件对其车辆的动力学性能进行了预测分析,得出以下结论:
①通过仿真计算与相关研究对悬挂式单轨车辆的受力分析比较,表明了建立的动力学模型的可靠性。同时该研究在一定程度上定量的给出了悬挂式单轨车辆的通过性的特性参数,可以为后续的智能化控制研究以及试验研究提供基础。
②根据仿真计算中不同工况的分析结果,对新型悬挂式单轨交通系统影响曲线通过性能因素有了更准确的掌握,其中曲线限速的分析结果可以为线路设计人员提供合理的速度选取依据,轨距加宽值在30 mm以内不会对运行性能产生影响。分析结果可以为桥梁设计中轨道梁的宽度设置提供尺寸选取参考。
③车辆曲线通过时的动力学性能预测分析得出:车辆垂向和横向平稳性指标的最大值均在《铁道车辆动力学性能评定和实验鉴定规范》(GB/T 5599-1985)平稳性一级数值2.5以内;垂向和横向的最大加速度、曲线段的轮重减载率最大值均在国际联盟颁布的《铁路运输国际标准》(UIC 505)合理范围以内。分析结果可为国内悬挂单轨交通系统工程建设提供重要的参考依据。
[1] 肖俊.单轨交通应用性分析[J]. 电力机车与城轨车辆,2013,36(4):20-23.
[2] 文孝霞,杜子学,申震,等.单轨车辆参数对轮胎磨损的影响及优化研究[J]. 机械设计与制造,2014(9):214-217.
[3] GUTAREVYCH V. A mathematical model study of suspended monorail[J]. Transport Problems: an International Scientific Journal,2012,7(3).62-66.
[4] 铃木康夫.千叶都市新型独轨URBANFLYER 0系列车的概要[J]. 铁道车辆技术(日),2013,190:24-31.
[5] 仲建华.重庆跨座式单轨交通[J]. 都市快轨交通,2004,17(5):17-22.
[6] 胡晓玲.悬挂式单轨车辆曲线通过性能研究[D]. 成都:西南交通大学,2013.
[7] 许文超.悬挂式单轨车动力学性能研究[D]. 成都:西南交通大学,2014.
[8] 松尾有正,版本滕彦,桑原秀夫,等.“都市モノレールの実用化—千葉都市モノレール[J]. 三菱重工技报報,1995,4:248-251.
[9] GIESEN U, MULLER S D.Fahrzeuge des H-Bahn systems universitat dortmund[J]. Verkehr and Technik, 1983, 4(10): 371-382.
[10]三木中直.モノレール凳達の歷史とその種類[J]. 電気車の科学,1974,27(4):17-20.
[11]王渊,孙守光,任尊松,等.橡胶轮转向架对车辆曲线通过性能的影响[J]. 电力机车与城轨车辆,2003,26(4):38-40,72.
[12]刘秋生,徐延海,陈启,等.4 WID轮毂电机式电动汽车横摆稳定性滑模控制研究[J]. 广西大学学报(自然科学版),2015,40(5):1080-1091.
[13]郑明军,陈潇凯,林逸,等.空气弹簧力学模型与特性影响因素分析[J]. 农业机械学报,2008,39(5):10-14.
[14]徐延海.随机路面谱的计算机模拟[J]. 农业机械学报,2007,38(1):33-36.
[15]赵江波,王军政.一种路面曲面不平度的数字生成方法[J]. 振动与冲击,2007,26(6):149-151.
[16]陈军.MSC.ADAMS技术与工程分析实例[M]. 北京:中国水利水电出版社,2008.
[17]JOLY R.Running of railway vehicles through small-radius curves[J]. Rail International, 1984,32(4):31-42.
(责任编辑 梁 健)
Simulation research on curve-passing performance of the suspended monorail vehicle
LIU Weng-long1, XU Yan-hai1,2, YANG Ji-zhong3, WANG Kong-ming3, WU Xiao3
(1. School of Transportation and Automotive Engineering, XiHua University, Chengdu 610039,China; 2. Sichuan Key Laboratory of Automotive Control and Safety, Chengdu 610039, China; 3. China Railway Eryuan Engineering Group Co., Ltd, Chengdu 610031, China)
Aimed at its unique operation characteristics,the stability and comfort of suspension type monorail transportation system are more susceptible to the circuit design. Based on the virtual prototype simulation platform, the curve-passing performance is studied. First of all, the structure and characteristics of the suspension monorail vehicle are systematically analyzed and simulation suspended monorail vehicle rubber tyre model is established. Then, single-section complete topology on suspension monorail vehicle dynamics simulation model is set up. Finally, simulation analysis of typical working conditions of suspension monorail vehicle is carried out. The simulation results show that within the speed limit curve through security, guide wheel force is almost linear growth with the increase of vehicle speed; but guide wheel force remains unchanged with the increase of distance curve track basic. Under different curve radius, the maximum index of vertical stability is 2.24, the maximum index of transverse stability is 2.15, both are in our national standard Appraisal Norms of Railway Vehicle Dynamics Performance Evaluation and Experimental (GB/T 5599-1985) regulation within the stationarity of grade 2.5; Vertical maximum acceleration is 0.64 m/s2, horizontal maximum acceleration is 0.45 m/s2, the maximum of rate of wheel load reduction is 0.56, conform to the International Union of the International Standard of Railway Transportation (UIC 505) regulations ; It showed that using the simulation platform of virtual prototype technology, the suspended monorail vehicle model can be better applied in the assessment of vehicle curve negotiation performance, and can be further applied to subsequent research of running characteristics.
suspended monorail; speed; orbital distance; curve negotiation performance; stationarity
2016-04-19;
2016-05-19
四川省科技厅科技支撑项目(2016GZ0346);四川省科技计划项目(16ZC2297);西华大学创新基金(ycjj2016085);西华大学学生创新创业项目(15208561-3)
徐延海(1970—),男,湖北黄冈人,西华大学教授,博士生导师,博士;E-mail:xuyanhai@mail.xhu.edu.cn。
刘文龙,徐延海,杨吉忠,等.悬挂式单轨车辆曲线通过性仿真研究[J].广西大学学报(自然科学版),2016,41(5):1402-1412.
10.13624/j.cnki.issn.1001-7445.2016.1402
U260.2+2
A
1001-7445(2016)05-1402-11
