基于粒子群算法的双时滞半主动悬架控制研究
2016-11-12瞿育文任传波周继磊马宝忠
瞿育文,任传波,周继磊,马宝忠
(山东理工大学交通与车辆工程学院, 山东淄博255049)
基于粒子群算法的双时滞半主动悬架控制研究
瞿育文,任传波,周继磊,马宝忠
(山东理工大学交通与车辆工程学院, 山东淄博255049)
针对四自由度半车悬架控制模型,提出一种基于双时滞反馈优化控制的车辆半主动悬架控制方法。引入时滞减振控制技术,应用时滞动力吸振器的减振机理和振动系统的幅频特性,建立基于车身加速度和俯仰加速度的统一目标函数,利用粒子群优化算法快速寻优特点获取最优时滞反馈控制参数,并在Matlab/Simulink环境下对悬架系统仿真。仿真结果显示:在随机激励下,双时滞反馈控制通过优化调节双时滞控制参数可以减小车身垂直加速度和俯仰加速度,相应的均方根值比被动悬架分别降低15.10%和22.48%,车身振动得到有效衰减。研究结果表明考虑时滞的车辆悬架模型不仅提高了模型建模精度,双时滞反馈控制更有效提高悬架的减振效果,改善车辆行驶平顺性,为半主动悬架控制系统设计提供了理论依据,具有一定的应用价值。
车辆半主动悬架; 时滞反馈控制; 统一目标函数法; 粒子群优化算法(PSO)
0 引 言
悬架系统作为汽车底盘的重要部件,对汽车行驶平顺性和操纵稳定性发挥重要作用。自半主动悬架和主动悬架理论提出以来,许多学者对车辆主动悬架做了大量的理论试验研究。随着悬架系统在结构和控制领域得到不断的改进,其控制系统精度要求也不断提高。然而在实际工程中,整套控制系统从信号采集传输、计算机分析以及执行机构的动作需要一定的时间,悬架控制系统不可避免存在时间滞后现象。因此,设计考虑含时滞的主动悬架控制系统对于保证系统稳定性以及提高悬架的减振性能都有一定的理论意义和应用价值[1]。
主动悬架设计的关键是主动悬架数学模型与控制策略的合理设计。目前很多学者致力于车辆主动悬架智能控制算法的研究[2-5],然而上述研究建模过程中未考虑控制系统一系列过程中的时间滞后现象。另外,多数研究因控制系统存在时滞所导致的系统失稳而将时滞作为“坏”因素,并想方设法排除时滞[6]或者对系统进行时滞补偿[7],如Pade逼近处理[8]。美国学者Olgac等[9-10]首次提出时滞动力吸振器,其机理是在主系统附加一个质量弹簧阻尼器,关键特征是在反馈循环中引入受控时滞,随激励频率的变化相应的调节反馈增益和时滞量使吸振器发生共振,从而减小主系统的振动,并在实验中验证了该新型减振技术的有效性[11]。中国学者赵艳影、徐鉴[12-13]研究了含时滞动力吸振器的两自由度结构动力学行为。对某一反馈增益系数,分析时滞稳定性区域,发现时滞动力吸振器某段稳定时滞区域内调节时滞可以减小主系统的振动,甚至可以完全消除。实际工程应用中,时滞状态反馈控制技术在某公司大型龙门吊定位精度比传统提高了50%,显示时滞反馈控制对振动控制的优越性[1]。上述文献均为在附加动力吸振器的基础上,研究时滞反馈控制对主系统的减振效果。而时滞控制对车辆悬架减振研究方面,张文丰等[14]、陈龙等[15]针对1/4含时滞的车辆悬架系统动特性,研究了临界时滞的理论算法,并分析时滞对半主动悬架动态特性的影响。目前时滞减振控制主要针对在主系统附加时滞动力吸振器,通过吸振器的共振来减小主系统振动。然而对于车辆悬架系统附加吸振器会受到车辆结构空间布置的限制。而汽车作为一个复杂多自由度动力学模型,研究时滞控制对1/4悬架减振效果显然其动力学控制行为描述不全面,采用半车四自由度悬架模型更能反映汽车真实振动特性。
本文针对四自由度车辆悬架系统的动态特性,将时滞动力吸振器的理论运用于半主动悬架,提出一种新的基于双时滞反馈控制的半主动悬架控制方法。该方法利用车辆悬架控制执行中存在的时间滞后客观因素,将其转化为主动控制变量,结合反馈控制和粒子群优化控制理论寻求控制参数。最后在Matlab/Simulink仿真环境中建立主动悬架和被动悬架仿真模型,验证时滞反馈对车辆减振性能效果。
1 车辆模型和控制系统的建立
1.1 车辆模型的建立
车辆悬挂系统是一个复杂的多自由度振动系统,存在大量的不确定性、时变性和非线性。为了便于分析时滞控制对悬挂系统振动的影响,将车辆模型合理的简化为线性模型。本文采用并联式半主动悬架模型作为研究对象,建立四自由度1/2车辆悬架模型,如图1所示。将坐标原点选取在悬挂质量和与非悬挂质量各自的平衡位置,依据牛顿第二定律可以写出该模型的动力学方程为:

(1)
汽车俯仰角较小时φ≈tgφ,另外由几何关系可得:
(2)
式中,Lf、Lr为质心至前、后轴的距离;非簧载质量m和I分别代表车身质量和转动惯量;xc、xtf、xtr、φ分别表示车身质心位移、前轮位移、后轮位移、车身质心俯仰角;ksf和csf、ksr和csr分别为前、后悬架的刚度和阻尼系数;ktf和ktr分别为前后轮胎刚度。
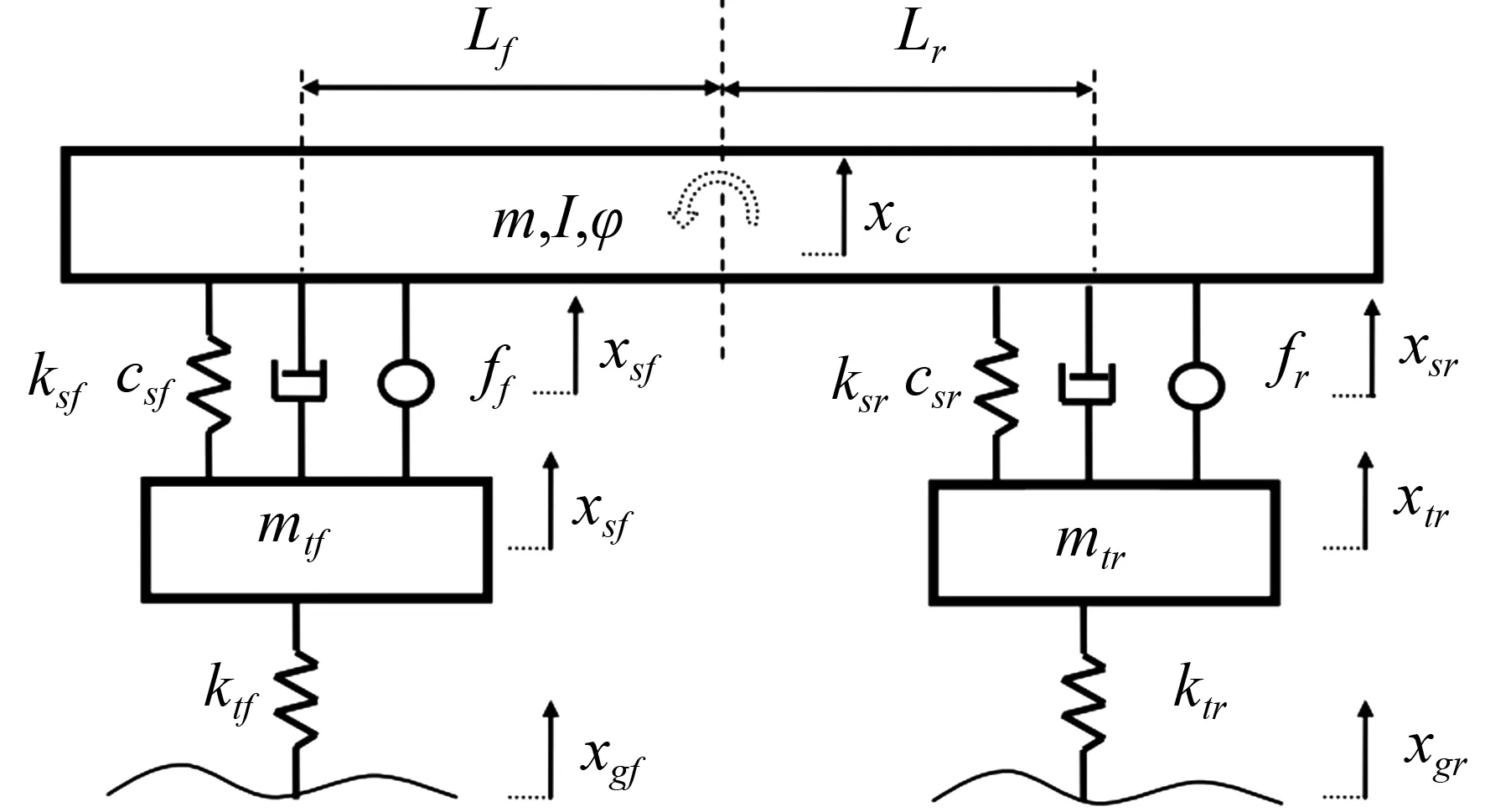
图1 四自由度车辆半主动悬架半车模型
1.2 建立悬架控制系统模型
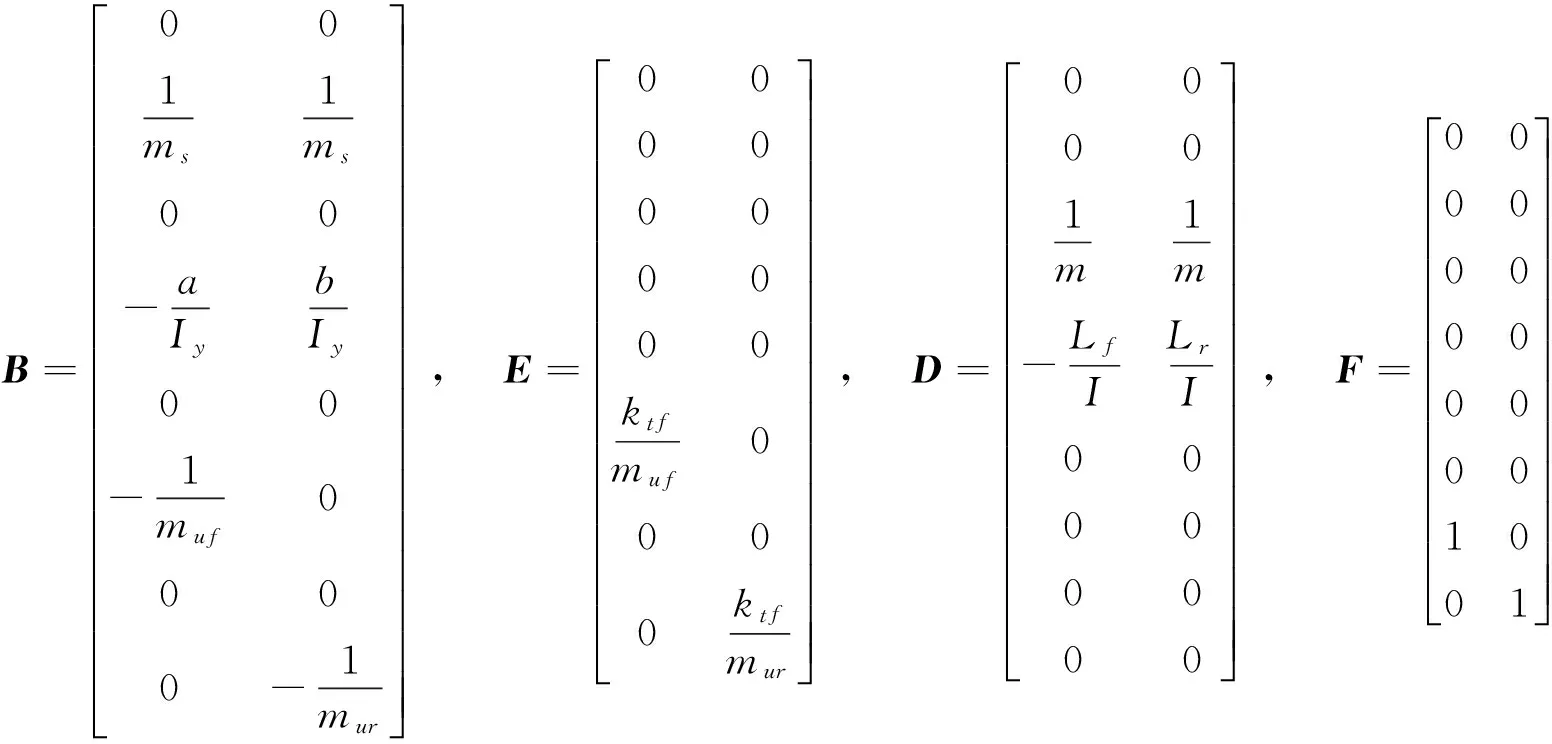
根据车辆悬架系统的性能指标要求,选择状态变量主动悬架系统的状态方程为:

(3)
其中,状态方程各控制矩阵见附录A;道路不平度表示为w(t)=[xgfxgr]T,xgf和xgr分别为前后轮的垂向位移输入;悬架主动控制力为U=[fffr]T,前后悬架时滞反馈控制力分别为:ff=gf·xtf(t-τ1),fr=gr·xtr(t-τ2) ;时滞τ1、τ2和gf、gr分别为前后悬架时滞控制量和反馈增益。
2 时滞减振悬架性能评价指标
假设车辆前后轮受到的路面激励傅里叶变换记为:xgf(t)→Xgf(ω),xgr(t)→Xgr(ω) ,若仅考虑直线行驶时,前后车轮的时间差Δt=(Lf+Lr)/v,前后车轮路面激励满足关系xgr(t)=xgf(t-Δt),频域中响应相角差ωΔt,其路面激励的傅里叶变换形式为Xgr(ω)=e-iωΔtXgf(ω)。则方程(1)进行傅里叶变换,将时域特性转化到频域研究并写为矩阵形式:

(4)

式(4)中分别得到车身垂直加速度和俯仰角对路面激励的幅频特性函数,分别为:
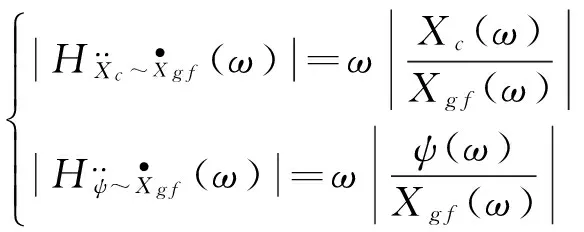
(5)
式(5)中,车身垂直加速度和俯仰加速度是衡量车辆行驶平顺性和舒适性的重要指标。为综合考虑车身的垂直和俯仰振动,本文引入统一目标函数法[16]来量化车身的振动效果,其基本思想是:通过线性加权和法将原多目标函数构造为一个新的目标函数,以新的目标函数作为该多目标函数的评价函数,从而将多目标函数转化为单目标函数。
考虑到时滞反馈增益和时滞量的量纲不同,假定时滞量和增益的数值范围不同。因此根据工程背景其搜索范围设定:反馈增益不超过被动刚度的两倍;时滞量则遵循时滞越小超调量越小的原则。考虑以质心加速度和俯仰角加速度对振动输入的幅频特性函数为评价函数[17]。因此基于统一目标函数法建立关于控制参数优化综合目标函数J(gf,gr,τ1,τ2),即:

(6)
另外,各子目标函数的量纲不同,值的大小相差较大,因此先对各子目标函数作无量纲处理;引入加权因子c1和c2分别作为评价函数的权重系数,衡量各子目标函数在整个多目标函数中的相对重要程度。
3 基于粒子群的时滞控制参数优化
粒子群算法(PSO)[18]是一类基于群智能的随机优化算法,广泛应用于函数优化、智能系统控制、多目标优化等领域。PSO的优点在于算法实现简单,速度快且易于收敛,无集中控制约束,对系统有很强鲁棒性。根据时滞减振的性能指标目标函数并结合粒子群优化算法的特点,将时滞控制参数确定问题转化为优化问题,使得悬架性能指标函数最小化。
根据实际算法需要,首先假定两个分别代表增益和时滞的二维搜索空间,由于两个待优化参数的数量级差别较大,因此空间分别由随机产生粒子组成种群X=(X1,X2,…,Xn),Y=(Y1,Y2,…,Yn)两个粒子群,两个搜索空间的粒子分别表示为二维的向量:Xi=(xi1,xi2)T,Yi=(yi1,yi2)T,根据目标函数计算出每个粒子位置对应的适应度值。第i个粒子的速度为Vi=(Vi1,Vi2)T,其个体极值为Pi=(Pi1,Pi2),种群的全局极值为Pg=(Pg1,Pg2)T,每一次迭代过程中,粒子通过个体极值和全局极值更新自身的速度和位置,其更新公式:

(7)
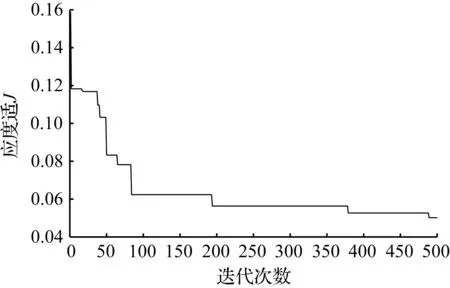
图2 适应度函数迭代优化Fig.2 Fitness function iterative optimization
式中,ω为惯性权重;d=1,2;i=1,2,…,n;k为当前迭代次数;Vid为粒子的更新速度;c1和c2为非负加速因子;r1和r2为产生于[0,1]的随机常数。
在优化过程中,为了避免搜寻最优粒子的盲目性,根据目标函数在优化过程中设定合理的范围。通过Matlab软件编写粒子群优化算法程序,随机选取100个粒子群进行迭代优化,重复500次后,得到悬架性能指标适应度函数随迭代次数的变化,如图2所示。由图2可看出,其适应度函数随着迭代次数的增加不断减小,表明车身振动和俯仰的减振效果不断减小。根据粒子群种群进化行为,每一次迭代过程中,受控参数通过个体极值和全局极值根据式(7)不断更新寻求最优值。由图3可知,受控参数粒子集中在最优参数附近。参照某车辆悬架参数(如表1所示),优化后得到前后悬架全局最优控制参数为:
gf=15 333.4 N/m,gr=33 371.4 N/m,τ1=0.21 s,τ2=0.85 s。

(a) 前悬架时滞参数优化

(b) 后悬架时滞参数优化

表1 车辆悬架模型参数

图4 B级路面不平度Fig.4 B-class road irregularities
4 建立仿真模型和结果分析
基于上述汽车半车半主动悬架模型,利用积分白噪声方法生成模拟车辆以20 m/s速度行驶的B级路面不平度作为路面激励,分别对被动悬架和双时滞控制半主动悬架进行仿真。为了验证双时滞反馈控制方法的有效性,建立如图4所示的Matlab/Simulink仿真模型悬架,其参数如表1所示。
根据汽车平顺性评价指标,利用图5所示Simulink仿真模块所搭建的双时滞半主动悬架控制模型,对悬架的车身加速度、俯仰加速度、悬架动挠度和轮胎动位移进行时域仿真,其仿真曲线如图6所示。

图5 时滞控制主动悬架仿真模型
根据10 s仿真数据计算得到车辆平顺性指标均方根值如表2所示。与被动悬架比较,图6(a)和(b)分别给出了车身加速度和车身俯仰加速度响应对比图,双时滞反馈明显减小了车身的质心加速度和俯仰加速度,其相应的均方根值分别从1.66和1.17下降到1.27和0.91,减振效率为15.1%和22.48%,如表2所示 。由图6(c)和(d)可知,前、后悬架的动挠度幅度都有一定增大,其均方根值分别由22.2 mm和20.1 mm增加到26.6 mm和23.6 mm,但其增大幅度仍在设计要求的范围内(±100 mm),未超过动挠度的限位行程。从图6的(e)和(f)看出,前后轮胎动相对位移变化幅度不大,对应的动位移均方根值从3.4和3.9变化到3.4和4.0,优化后比例分别为1.33%和2.8%。由此说明本文的双时滞半主动控制方法对轮胎变形量和相对动载影响很小,保证了车辆行驶的安全性和车辆操纵稳定性。

(a) 车身质心加速度响应

(b) 车身俯仰加速度响应
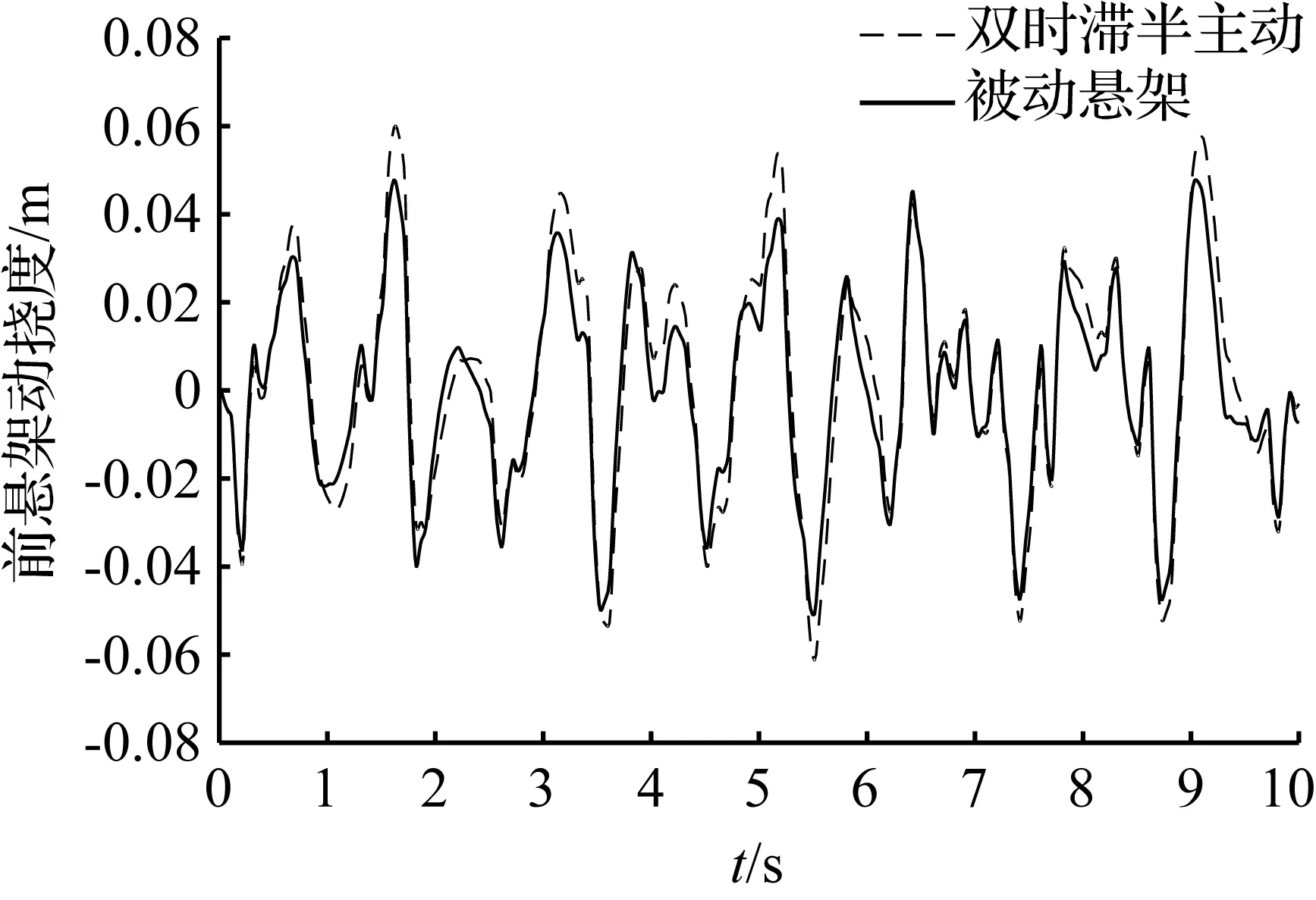
(c) 前悬架动挠度
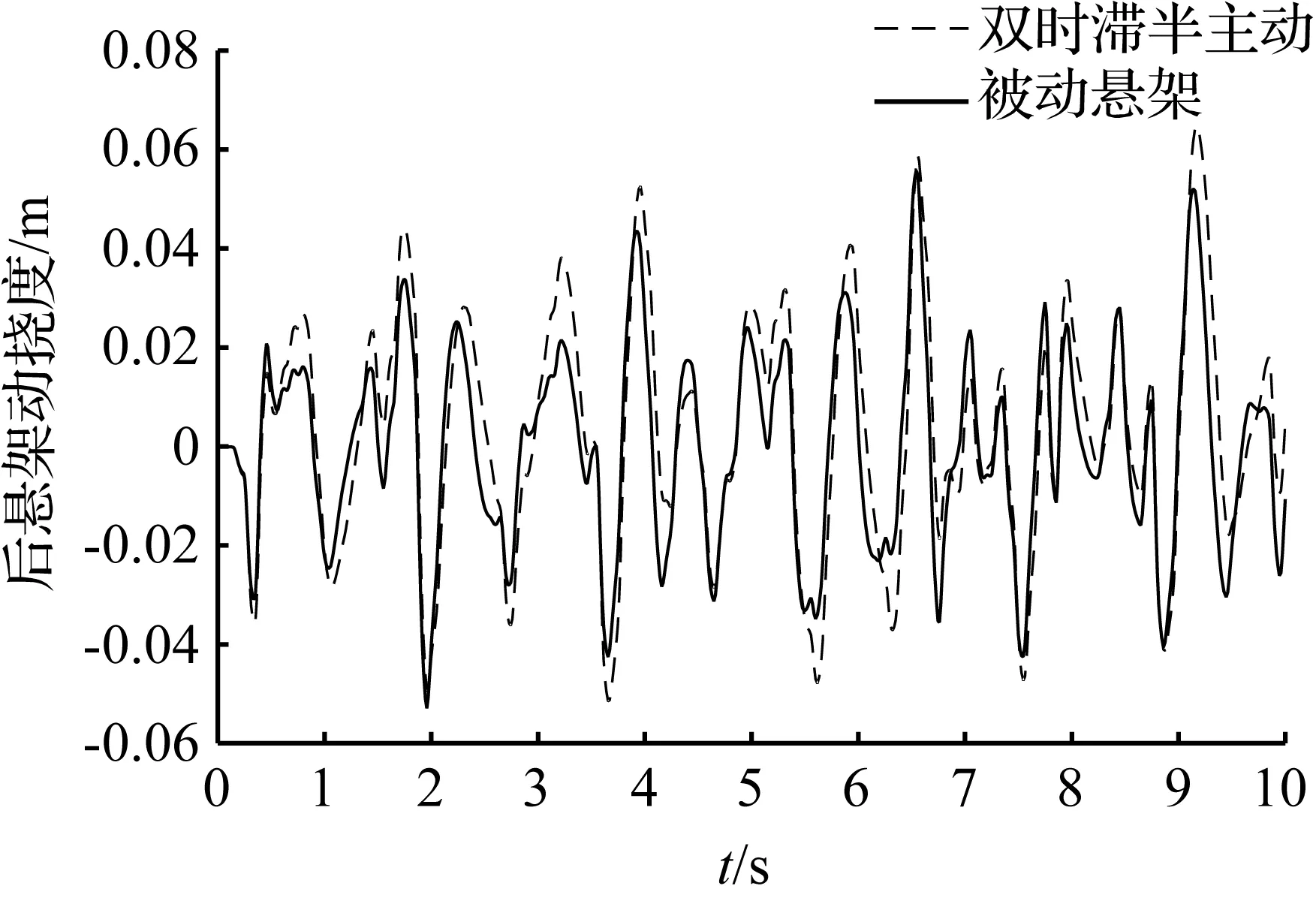
(d) 后悬架动挠度
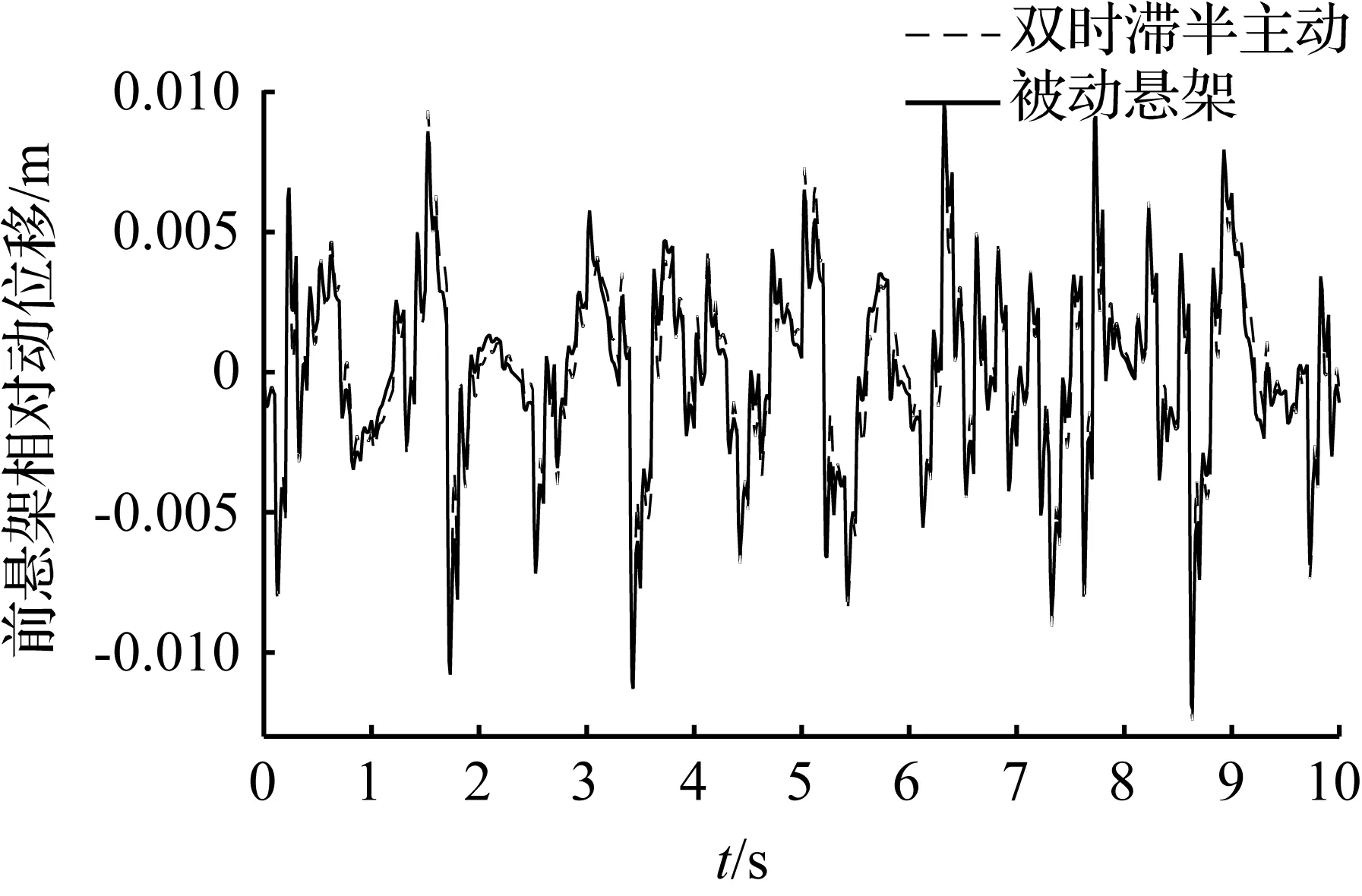
(e) 前悬架轮胎动位移

(f) 后悬架轮胎动位移
5 结 论
本文利用时滞动力吸振器理论构造车辆半主动悬架模型,采用引入时滞动力吸振器理论与粒子群优化算法融合,对时滞反馈控制进行优化并对模型进行数值仿真。得到如下结论:
①针对四自由度的车辆悬架系统,借用时滞动力吸振器理论引入基于前后双时滞轮胎状态反馈控制,在并未附加额外质量弹簧阻尼器基础上,建立了双时滞半主动悬架动力学模型。
②对于时滞减振控制参数优化建立了基于粒子群优化算法,以车身垂直加速度和俯仰加速度的优化目标函数优化时滞参数。优化仿真结果表明,车身垂直加速度和俯仰加速度分别减小了15.1%和22.48%,振动得到明显改善。虽后悬架动挠度有一定增大,但在悬架设计的允许范围之内,车轮相对动位移没有变化,未加剧轮胎负载,不影响车辆的安全性。结果表明,通过双时滞优化车辆减振控制效果显著,可以改善车辆的乘坐舒适性。
[1] 王在华,胡海岩.时滞动力系统的稳定性与分岔:从理论走向应用[J]. 力学进展, 2013, 43(1):3-20.
[2] PRIYANDOKO G, MAILAH M, JAMALUDDIN H.Vehicle active suspension system using skyhook adaptive neuro active force control[J]. Mechanical Systems & Signal Processing, 2009, 23(3):855-868.
[3] YAGIZ N, HACIOGLU Y.Backstepping control of a vehicle with active suspensions[J]. Control Engineering Practice, 2008, 16(12):1457-1467.
[4] 唐传茵, 李华, 周炜,等.基于遗传算法和神经网络的车辆主动悬架控制技术[J]. 农业机械学报, 2009, 40(2):6-11.
[5] 张培培, 赵相君, 姚立健,等.基于模糊阻抗控制的车辆液压主动悬架研究[J]. 广西大学学报(自然科学版), 2015,40(5):1109-1116.
[6] CHU S Y, SOONG T T, LIN C C, et al.Time-delay effect and compensation on direct output feedback controlled mass damper systems[J]. Earthquake Engineering & Structural Dynamics, 2002, 31(1):121-137.
[7] DU H, ZHANG N, LAM J.Parameter-dependent input-delayed control of uncertain vehicle suspensions[J]. Journal of Sound & Vibration, 2008, 317(3-5):537-556.
[8] EBRAHIMI B, TAFRESHI R, FRANCHEK M, et al.A dynamic feedback control strategy for control loops with time-varying delay[J]. International Journal of Control, 2014, 87(5):887-897.
[9] OLGAC N, HOLM-HANSEN B T.A novel active vibration absorption technique: delayed resonator[J]. Journal of Sound & Vibration, 1994, 176(1):93-104.
[10]OLGAC N, HOLM-HANSEN B.Design considerations for delayed-resonator vibration absorbers[J]. Journal of Engineering Mechanics, 1995, 121(1):80-89.
[11]GAO Q, KAMMER A S, ZALLUHOGLU U, et al.Combination of sign inverting and delay scheduling control concepts for multiple-delay dynamics[J]. Systems & Control Letters, 2015, 77:55-62.
[12]赵艳影, 徐鉴.利用时滞反馈控制自参数振动系统的振动[J]. 力学学报, 2011, 43(5):894-904.
[13]赵艳影, 徐鉴.时滞动力吸振器及其对主系统振动的影响[J]. 振动工程学报, 2006, 19(4):548-552.
[14]张文丰, 翁建生, 胡海岩.时滞对车辆悬架“天棚”阻尼控制的影响[J]. 振动工程学报, 1999, 12(4):486-491.
[15]陈龙, 汪若尘, 江浩斌,等.含时滞半主动悬架及其控制系统[J]. 机械工程学报, 2006, 42(1):130-133.
[16]梁尚明 殷国富.现代机械优化设计方法[M]. 北京:化学工业出版社, 2005.
[17]吕彭民, 和丽梅, 尤晋闽.基于舒适性和轮胎动载的车辆悬架参数优化[J]. 中国公路学报, 2007, 20(1):112-117.
[18]陈龙祥, 蔡国平.基于粒子群算法的时滞动力学系统时滞辨识[J]. 应用力学学报, 2010, 27(3):433-437.
[19]DREHMER L R C.Parameters optimisation of a vehicle suspension system using a particle swarm optimisation algorithm[J]. Vehicle System Dynamics, 2015, 53(4):449-474.
[20]PARSOPOULOS K E, VRAHATIS M N.Recent approaches to global optimization problems through particle swarm optimization[J]. Natural Computing, 2002, 116(2-3):235-306.
附录A:
悬架控制系统状态方程状态变量及相应矩阵:



(责任编辑 梁 健)
Semi-active suspension control by using dual-delayed feedbackbased on particle swarm optimization
QU Yu-wen, REN Chuan-bo, ZHOU Ji-lei, MA Bao-zhong
(School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo 255049, China)
A vehicle semi-active suspension control method based on the dual-delayed feedback optimum control was proposed for 4-degree semi-car vehicle suspension model. On the basis of mechanism of delayed vibration absorber, delayed control suppression technology and the system amplitude-frequency characteristic, the unified-object function of the body acceleration and pitch angle acceleration is established, and the delay feedback control parameters is optimized by the PSO (particle swarm optimization). The simulation of suspension model is conducted under the Matlab/Simulink environment. The results show that the dual-delay feedback control can suppress the body and pitch acceleration by optimizing dual-delay parameters under stochastic excitation, whose RMS (root-mean-square) reduced 15.10% and 22.48%, respectively, than that of passive suspension and body vibration is suppressed efficiently. The results demonstrated that the vehicle suspension model with time delay can improve the modeling accuracy, and dual-delay feedback can get the better suppression performance with good ride smoothness. The above method provides a theoretical basis for the design of semi-suspension system.
vehicle semi-active suspension; delayed feedback control; unified object function; particle swarm optimization (PSO)
2016-03-15;
2016-04-15
国家自然科学基金资助项目(51275280)
任传波(1964—),男,山东潍坊人,山东理工大学教授,博士生导师,博士;E-mail: chuanbor@sdut.edu.cn。
瞿育文,任传波,周继磊,等.基于粒子群算法的双时滞半主动悬架控制研究[J].广西大学学报(自然科学版),2016,41(5):1368-1376.
10.13624/j.cnki.issn.1001-7445.2016.1368
U461.1
A
1001-7445(2016)05-1368-09
