玉米钵盘育秧播种机的设计与仿真研究
2016-11-12董智张伟
董智,张伟
(黑龙江八一农垦大学工程学院,大庆 163319)
玉米钵盘育秧播种机的设计与仿真研究
董智,张伟
(黑龙江八一农垦大学工程学院,大庆163319)
为提高玉米移栽育苗播种效率,达到玉米增产目的。以窝眼式排种器播种原理为基础,设计一种适应于该玉米秧盘特定尺寸的播种机。利用UG三维建模仿真软件,对关键部件进行了参数设计和试验仿真。分析确定了机构的基本结构参数和运动参数,完成了一种窝眼滚筒式自走玉米钵盘育秧精量播种机的设计,且能够满足对玉米钵盘育秧播种的农艺技术要求,为今后玉米钵育精量播种的设计和应用提供了参考。
玉米育秧;窝眼滚筒;精量播种;仿真设计
采用移栽种植方式是解决东北玉米种植受自然条件限制的有效方法之一[1-2],而传统移栽钵盘不适用于高速机械化连续移栽的要求。对能满足连续高速机械化移栽的秧苗载具的研究中,一种以农作物秸秆为主要原料,能够随秧苗移栽入土,达到秸秆还田目的,穴盘成直列式连续排列,利于移栽机实现高速自动化作业的玉米秧盘的成功研制实现了机械化高速移栽的要求。但是目前对该玉米钵盘的播种方式还停留在人工播种方式上。所以针对该玉米钵盘的特点,在满足其农艺要求的前提下,设计一种播种机具,以克服人工播种的弊端。
通过对相关播种机核心部件的研究中发现,国外精密排种机构最早应用于大田机械,早期以机械式排种器为主。随着对播种精度要求的提高,排种器的研究逐渐向气力式排种器方向发展[3]。气力式排种器具有适于高速作业且播种精度高和伤种小的特点[4],但气力式排种器同样也存在一些问题,如整体结构对气密性要求高且结构复杂,密封结构和部件成本高且使用寿命低,对于非球体且不规则的作物种子的适应性差,气压生成装置产生的噪声和震动不适于小区域作业环境等。对于以上弊端,人们又开始寻找新的办法来试图解决这些问题,于是像电磁式和液流式等新的排种原理得到研究。另一部分人则把改进传统机械式排种器作为了新的研究方向。国内在小型播种机具的研制开发是一个从引进向自主创新的转变过程[5]。
从研究方法上看,研究者们常把计算机辅助设计引入到设计研究中,通过计算机程序软件设计并仿真排种机构和运行环境,从而得到设计参考。利用人工神经网络模型对性能参数和统计模型进行优化以及利用计算机对试验图像进行处理分析等方法都得到了应用[6]。
以窝眼式排种器为基础,针对玉米钵盘育秧精量播种实际需要和适应的播种模式,设计了一种用于玉米钵盘连钵特定尺寸和播种精量要求的窝眼式排种滚筒,并通过仿真软件分析确定了在满足播种农艺要求下各关键部件的基本结构参数和性能参数,为今后研究玉米钵盘育秧播种机的设计提供了参考。
1 结构及工作原理
1.1结构组成
玉米钵盘育秧播种机由播种窝眼滚筒、导种板、刮种刷、扫种滚刷、PLC可编程控制系统等组成,如图1所示。
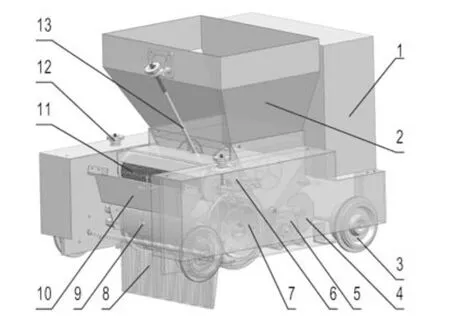
图1 玉米钵盘育秧播种机三维结构图Fig.13D structure drawing of corn bowl growing tray planter
1.2工作原理
其核心工作部件为播种窝眼滚筒,窝眼滚筒圆周方向上均布型孔窝眼,并且滚筒轴向等距分列多排窝眼可以同时完成多个穴位的播种任务。整个窝眼滚筒分为5个区域,如图2所示。
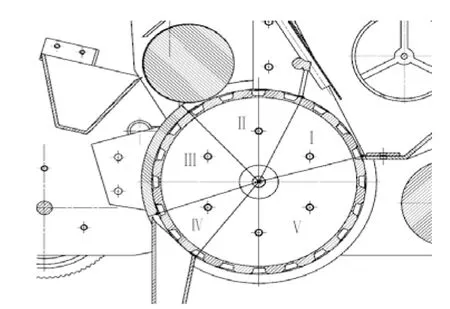
图2 窝眼滚筒分区图Fig.2Hole partition of nest
在充种区、清种区和护种区,分别由刮种刷、扫种滚刷和护种板来保证在种子随窝眼滚筒运动到达投种区前,每个窝眼内有且只有一粒玉米种子;然后由护种板保证在种子达到投种区前不会脱离滚筒窝眼;最后在投种区,种子在重力或重力和护种板刮擦力的共同作用下脱离滚筒窝眼,经导种板落入钵盘中,从而实现“一穴一粒”的投种要求。在此过程中,刮种刷和扫种滚刷的共同作用减少了窝眼内多粒和空穴的现象。通过PLC控制器控制行走驱动电机,实现播种机在轨道上的前进和后退。利用传感器判定执行位置,PLC控制器同时根据传感器信号信息按照设定程序控制排种驱动电机工作和停止。播种窝眼滚筒、扫种滚刷和排种驱动电机之间使用同步带传动以保证运行的平稳,防止打滑现象发生。
2 分析及设计
2.1玉米种子状态分析
根据观察,由于玉米种子的形状特点,种子在平面上自然状态多为平卧式,竖卧式因质心较平卧式高,所以在受到外力时玉米种子的竖卧姿态容易变为平卧姿态,如图3所示。
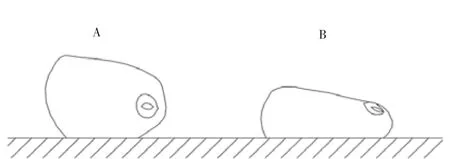
图3 玉米种子静置状态示意图Fig.3State diagram of standing corn seeds
其中A为竖卧式,B为平卧式。所以窝眼孔型的设计以玉米籽粒最大厚度为窝眼深度的尺寸依据。
2.2受力分析
根据玉米种子形状特点,选择充种起始位置,如图4所示。
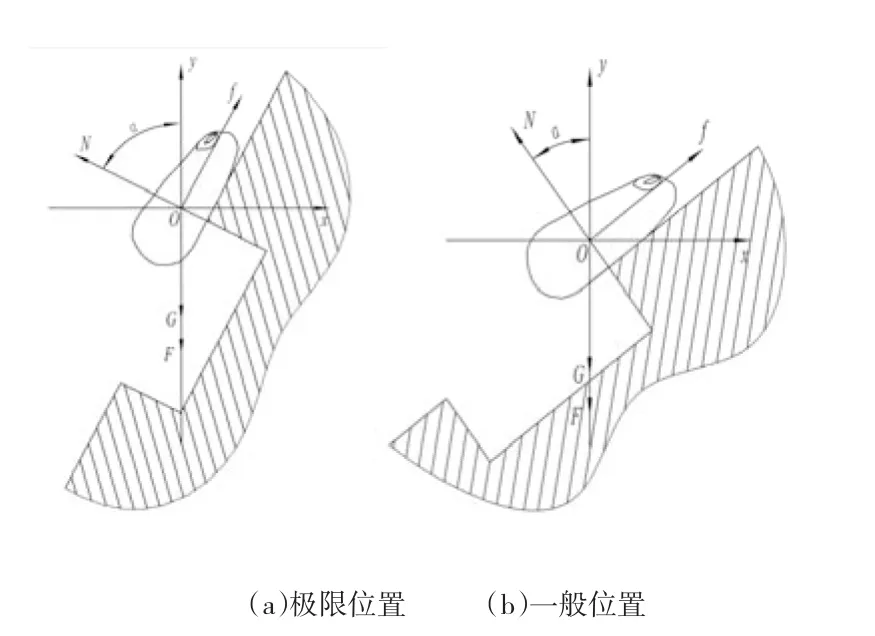
图4 玉米种子能进入窝眼的极限位置和一般位置示意图Fig.4Diagram of extreme positions and general positions on corn seeds entering the nest hole
图中滚筒转动方向为顺时针转动,其中O为种子质心,N为种子受到的滚筒对其的支持力,f为种子与滚筒间的摩擦力。同时种子还受到上层种子的压力F以及自身的重力G的作用,在这些力的共同作用下种子落入窝眼内,重力方向刚好落在窝眼内角上是种子能落入到窝眼内的极限位置。如果α角度继续增大,则种子将无法进入窝眼或者进入后翻出。根据几何关系,计算α角度:

其中D为孔径,B为种子平均厚度,H为孔深。根据前期试验数据,解得α≈56.82°,取充种起始角α与竖直方向夹角为55°。
清种位置的选择根据刮种刷与种子相互作用位置选择,毛刷应与圆周法向重合,如图5所示。
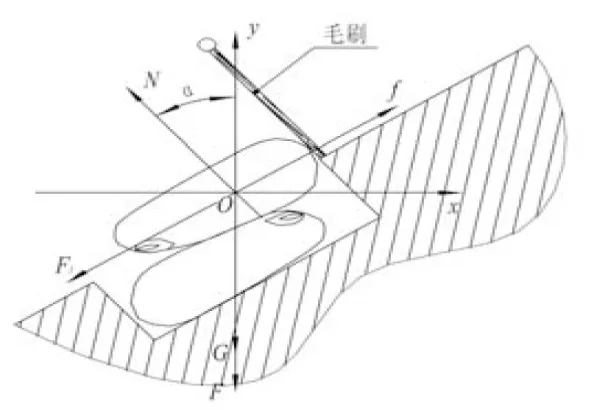
图5 刮种刷与种子相互作用位置示意图Fig.5Diagram of shaving seeds brush and seeds interaction
对窝眼内多余种子进行受力分析,窝眼内多余的种子还受到上层种子的压力F及自身的重力G的作用。则有x轴方向受力平衡得:

解得:F1=(F+G)(μ cosα-sinα)那么随着毛刷安装位置与竖直方向夹角α的减小,清种所需要的毛刷清种力越大。多余种子清出高程为m=H-B。当滚筒继续转动,高程差斜面将不再与水平面重合,支持力方向将位于坐标系第一象限。此时如果种子质心位于窝眼边缘竖直范围内,在没有毛刷的作用下,种子将有向回滚动或滑动的趋势。所以α的角度可以通过几何关系求出,即

解得α≈9.46°,取α=10°为充种终止角,即刮种刷安置于毛刷平面与竖直方向成10°夹角,如图6所示。根据以上计算可得种子的充种角度在与竖直方向成55°~10°的范围内,则充种范围角为45°。
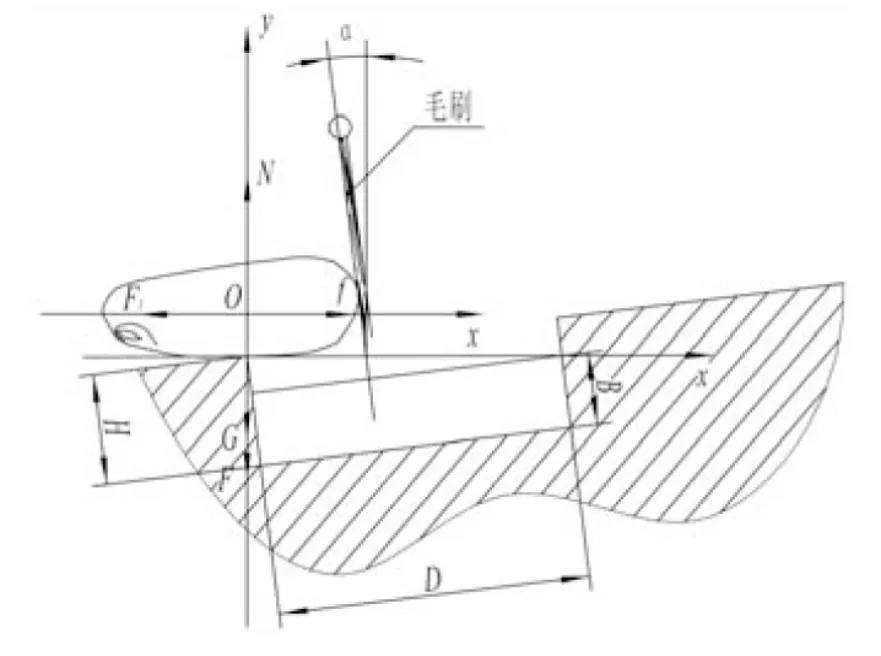
图6 刮种刷安装位置图Fig.6Installation location of shaving seeds brush
2.3窝眼分布及滚筒直径的设计
在圆周方向上应至少有两个窝眼完全暴露在充种区域45°范围内,以保证有足够的充种时间和空间。则90°范围内应至少有五排窝眼,那么滚筒圆周应该至少均布20个窝眼。
清种过程中为避免多余种子被清出时干扰后面的窝眼充种[5],窝眼间距应大于一个窝眼孔径的距离,如图7所示。
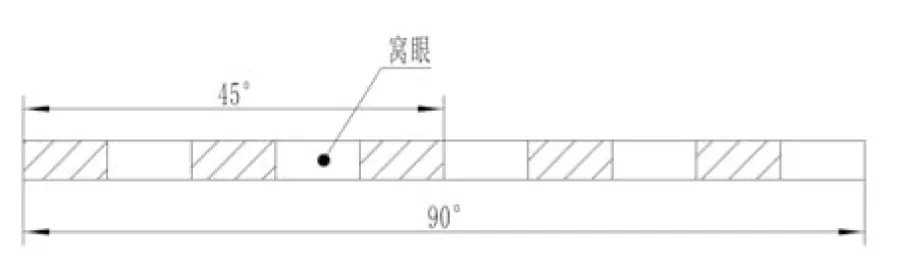
图7 窝眼分布图Fig.7Distribution of nest hole
如果窝眼间距小于窝眼孔径,会导致前面被清出的种子挡住了后面窝眼的一部分,致使其他玉米种子很难进入窝眼,如图8所示。
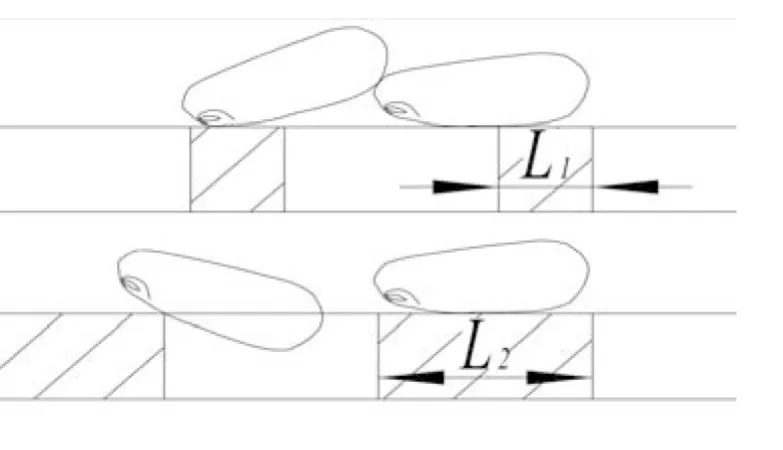
图8 种子相互干扰图Fig.8Graph of seeds mutual interference
故窝眼间距应大于窝眼孔径,所以窝眼滚筒的周长计算公式为:

其中D为窝眼孔径,L2为窝眼间距,n为窝眼滚筒圆周上均布的窝眼个数。但在窝眼数量一定的情况下,窝眼间距越大,窝眼滚筒的周长越大。所以为了尽量控制窝眼滚筒尺寸,以避免整机尺寸过大,n取20,由直径计算公式:

得其直径D的平均值约等于159.15 mm,取窝眼滚筒直径D为160 mm。
3 仿真模拟
3.1仿真模型建立
设置导种板的目的是通过导种板限制,减少种子相对穴位的偏移量,使玉米种子能够准确落入对应的穴位内。利用装配完的虚拟样机整机尺寸拟定了导种板的设计长度为135 mm。但导种板的设置是否会影响正常下落种子的运动轨迹,通过建立三维运动仿真环境模拟玉米种子的投种过程来研究分析玉米种子的下落轨迹是否存在与导种板发生碰撞的情况[6]。利用UG软件建立导种板和玉米种子等相关部件的三维模型,如图9所示。将各部件按照相应位置关系组装成仿真环境,在软件中加载运动参数。通过UG仿真运动分析得出玉米种子下落轨迹和水平方向加速度图。
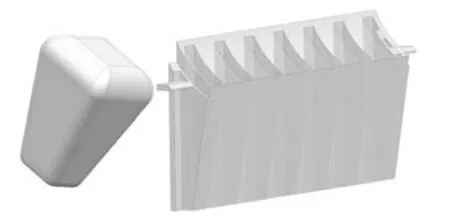
图9 种子和导种板三维模型Fig.93D model of seeds and guiding seeds device
3.2模拟运动分析
假设玉米种子在窝眼内的瞬时速度与窝眼滚筒在该点线速度相同,同时玉米种子还具有与机车行进方向一直的初速度。但玉米种子与导种板相对碰撞位置关系与播种机前进方向合速度无关。
按照每亩地需要5 000株玉米植株,一小时完成5亩地的育苗任务。播种机可完成一次六行播种,行进方向钵盘穴距为42 mm。为弥补播种机可能存在的空穴漏播现象、保证移栽株数,按播种穴数的80%为移栽株数计算得出播种机的窝眼滚筒转速公式为:

其中V为机车行进速度,N为圆周方向窝眼数,s为秧盘穴距,解得最低转速为n≈0.072 r·s-1。
导种板包角为30°。底端开口长度为13 mm,将相关数据带入UG运动仿真环境模拟玉米种子投种运动,如图10所示。玉米种子下落轨迹仿真结果表明:0.576 s后,即玉米种子脱离窝眼后,玉米种子质心在水平方向上的加速度没有波动,即没有与导种板发生碰撞。所以得出的结论为:导种板相关设计参数满足设计要求,正常下落的玉米种子不会与导种板发生碰撞。
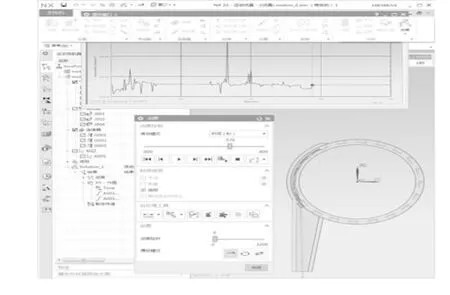
图10 玉米种子脱离窝眼的时刻Fig.10Time of corn seeds leaving hole
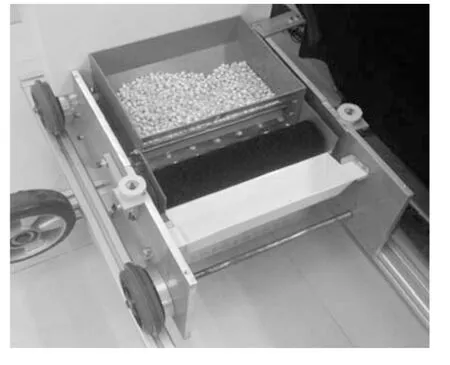
图11 玉米钵盘育秧播种机样机Fig.11Planter prototype of corn bowl growing tray
4 播种性能试验
为了验证播种机构理论设计的正确性,试制了样机如图11,并进行了播种试验。
4.1试验装置及试验条件
试验机具为玉米钵育秧盘播种机样机,试验秧盘为与实际秧盘尺寸一致的模拟纸质秧盘。试验种子选用经过筛选的兴垦3号包衣玉米干种,长度范围8~12 mm,宽度范围6~10 mm,厚度范围5~9 mm,马齿形,千粒重410 g。通过正交试验确定的最优影响因素水平组合为播种试验台行进速度100 mm·s-1,窝眼型孔深度为6.5 mm,滚筒转速0.12 r·s-1。选取开机2 s后的50穴钵盘为试验样本进行统计,试验进行5次,通过人工计数方式统计播种情况。
4.2评价标准
根据GB/T 6973-2005《单粒(精密)播种机试验方法》的规定,排种性能指标包括合格指数:A=n1/N'× 100%;重播指数:D=n2/N'×100%;漏播指数:M=n3/ N'×100%。式中n1为单粒排种数;n2为2粒以上排种数;n3为漏播排种数;N'为理论排种数[7]。
4.3试验结果
表1为播种机播种质量统计表。由表可知,该播种机在试验速度下的平均播种合格率能达到90.4%,平均播种漏播率为6%,平均播种重播率为3.6%,基本满足播种设计要求并高于国标要求[8]。

表1 播种机播种质量指数统计表Table 1Index statistics of planter mass
5 结论
(1)设计了一种适用于玉米钵育秧盘的窝眼滚筒式播种机,该机具自动化程度较高,节省了人力和物力。
(2)通过UG软件建立了该播种机的三维虚拟样机模型,并利用仿真模块对玉米种子下落过程进行了模拟,得到了玉米种子在导种板中的运动轨迹,验证了参数选择和机构设置的合理性,为今后研究玉米钵盘育秧播种机的设计提供了参考。
(3)对试制样机进行了播种试验,可以满足正常的试验播种需要。但该播种机的播种质量还有很大的提升空间。
[1]王秀静.浅析玉米栽培技术[J].科技创新与应用,2014(27):279.
[2]王岭,李响,高树仁.大庆地区种植密度对玉米产量及农艺性状的影响[J].黑龙江八一农垦大学学报,2013,25(6):5-9.
[3]尚家杰.可利用重力与离心力充种的立式圆盘排种器研究[D].哈尔滨:东北农业大学,2013.
[4]张德文,李林,王惠民.精密播种机械[M].北京:农业出版社,1982.
[5]张燕梁,青苡任,万霖,等.2BZJ-4型精量供水播种机的研制[J]. 黑龙江八一农垦大学学报,2014,26(2):29-32.
[6]于晓波.基于虚拟样机的勺式玉米精密排种器的仿真研究[D].长春:吉林大学,2014.
[7]GB/T 6973-2005.单粒(精密)播种机试验方法[S].北京:中国标准出版社,2005.
[8]JB/T 10293-2001. 单粒(精密)播种机技术条件[S].北京:机械工业出版社,2001.
Design and Simulation Research of Corn Bowl Growing Tray Planter
Dong Zhi,Zhang Wei
(College of Engineering,Heilongjiang Bayi Agricultural University,Daqing 163319)
In order to improve the efficiency of corn planting seedling transplanting,the purpose was to increase maize yield.Based on the principle of nest hole seeding,the adaptation to the specific size of the corn seedling tray planter was designed.Using the UG software of three-dimensional modeling and simulation to research the parametric design and test simulation of the key component. The article analyzed and determined the basic structural parameters and kinematics parameters of mechanism and completed the design of self-propelled nest hole corn bowl growing tray precision planter.It might meet the agronomic technical requirements of corn bowl growing tray seeding,and provided some reference for design and application of corn bowl growing precision sowing in the future.
corn seedlings;nest hole drum;precision sowing;simulation design
S223.2+6
A
1002-2090(2016)02-0086-05
10.3969/j.issn.1002-2090.2016.02.017
2015-03-11
教育部高校博士点基金(玉米植质钵育移栽机械关键装置的理论研究与试验:20092305110002)。
董智(1988-),男,黑龙江八一农垦大学工程学院2012级硕士研究生。
张伟,男,教授,博士研究生导师,E-mail:zhang66wei@126.com。
