三维激光扫描建筑物立面数据的自动提取
2016-11-11王李娟康志忠田艳凤邵聪颖
林 卉,王李娟,康志忠,田艳凤,邵聪颖
(1. 江苏师范大学测绘学院,江苏 徐州 221116; 2. 中国地质大学(北京)土地科学技术学院,北京 100083; 3. 空军后勤学院,江苏 徐州 221110)
三维激光扫描建筑物立面数据的自动提取
林卉1,王李娟1,康志忠2,田艳凤3,邵聪颖1
(1. 江苏师范大学测绘学院,江苏 徐州 221116; 2. 中国地质大学(北京)土地科学技术学院,北京 100083; 3. 空军后勤学院,江苏 徐州 221110)
对地面三维激光扫描仪所获取的海量点云进行建筑物立面数据的提取,有利于提高后续分割拟合、三维建模及变化检测等处理的效率和稳定性。因此本文针对建筑立面点云数据的特点,提出了一种基于相邻扫描点角度间隔直方图的提取方法。首先介绍了固定式三维激光扫描获取的数据特点,然后对基于扫描线的建筑物立面数据提取方法应用于固定式三维激光扫描数据的局限性进行了分析,在此基础上提出了统计扫描角度范围内指定大小(如1°×1°)格网内扫描点的个数,以生成相邻扫描点角度间隔的二维直方图并转换成灰度图像,通过二值化和连通区域标记方法提取了建筑立面数据。试验证明本文方法是行之有效的。
地面激光扫描;点云;建筑物立面;二维直方图;灰度影像
当前,地面三维激光扫描仪能够获取高空间分辨率(毫米级)的点云数据,从而为工程实际应用提供了理想的三维空间数据源。然而,地面三维扫描仪在大面积高分辨率的获取目标建筑物三维数据的同时,也会相应地获取到行人、植被等大量噪声点,势必会造成其数据量庞大、后期数据处理效率低下。对于建筑物的三维建模、变化检测等处理而言,点云中会存在大量无用数据,如果能预先对建筑物立面的点云数据进行识别提取,就能剔出大量的无关点,从而有利于提高后续处理的效率和稳定性。
已有不少国内外学者对移动式扫描仪获取的建筑物点云数据的分类和提取作了相关研究。日本东京大学研制的VLMS[1-2],可以初步将垂直面(如建筑面、墙壁),水平孔洞和自然物体(树木和灌木)等分离开来。徐逢亮、李树楷[3]利用单条扫描线上激光点的空间位置关系,能够快速自动地提取城市建筑物的边界及高度。李必军[4]对车载激光扫描系统获取的建筑物点云数据进行了研究,提出了一种直接从未经姿态改正的距离影像中提取建筑物轮廓信息的方法。杨洋[5]等在分析车载激光点云扫描特征的基础上,提出了一种基于扫描线的车载激光雷达点云滤波方法。该滤波方法能够在保证建筑物立面的细节特征的情况下提取建筑物立面点信息。史文中[6]等通过对车载激光扫描系统获取的距离影像的分割进行了研究,提出了利用投影点密度进行距离图像分割的方法。该方法根据投影点密度不同,并辅助以高度信息可以区分出距离影像中主要目标,开辟了距离图像数据处理和应用的新方向。由于在车载扫描过程中建筑物立面与移动平台的行驶方向大致垂直,Frueh等[7]基于在每一条车载激光扫描线上建筑物立面的点到仪器中心的距离理论上相等的结论,生成所有扫描线的深度信息二维直方图,据此提取出建筑物的主平面。
而对于固定式地面激光点云数据而言,目前已有的算法通常是直接对点云进行分割和拟合,对建筑立面数据预先提取的研究相对较少。在此情况下,本文通过分析建筑物立面点云数据的特点,提出一种基于相邻扫描点角度间隔直方图的方法,可以自动快速地提取建筑物立面信息,试验证明本文方法是行之有效的。
一、地面激光扫描数据特点
图1(a)为地面三维激光扫描仪在单条扫描线上的点云空间分布图,按照点云所属类型不同,激光点云可分为以下4类:
1) 建筑物立面点。对大部分建筑物来说,其立面都具有垂直几何特性。在单条扫描线上,相邻扫描点在水平方向投影近似为一点,在垂直方向呈连续性的线性分布。
2) 地面点。同一扫描线上,地面点处于所有点云数据中相对最低处且高程变化比较平缓,其在水平方向上呈连续性的线性分布。

图1 单条扫描线上的点云分布
3) 其他地物点。街灯、广告牌等其他物点,由于自身目标相对于建筑物较小,且结构具有不规则性,反射于这些目标的激光点在扫描线上数据量稀少且在局部范围呈离散无规律分布,但在小范围内也有可能呈现一定的线性分布[5]。
4) 噪声点。在扫描目标建筑物时,镜面反射、空气中大量尘埃、遮挡物遮挡和建筑物边缘等各种因素均会对激光信号产生干扰,不可避免会出现一些杂乱异常的激光噪声点。这些点通常具有一定的随机性,在扫描线上的分布无规律可循。
对于移动式扫描数据而言,单条扫描线的数据特点与固定式类似,但由于移动扫描的方向一般与行进方向垂直,因此如图1(c)所示,同一建筑物立面在不同扫描线上点到扫描中心的深度值相差不大[8]。而地面固定式激光扫描仪在单次扫描时,仪器中心相对于地面静止,但是建筑物立面点到扫描仪中心的水平距离随着仪器的旋转时刻发生变化,是一个逐渐变大或逐渐变小的过程。
中国在多年农村扶贫过程中,一直根据贫困特点、扶贫形势、国家发展战略与政府财政支持能力的变化,通过试验和创新,不断完善和调整扶贫战略、治理结构、资金管理和扶贫方式等,不断提高扶贫的有效性和用于扶贫资源利用的效率。坚持扶贫创新,使中国农村扶贫开发战略和方式能够适应不断变化的扶贫形势,长期保持较高的扶贫效率。
二、基于扫描线的建筑物立面数据提取
如图1(a)中所示激光束打出的一条扫描线上的任意一点Pi(xi,yi,zi)到扫描仪中心的水平距离
式中,Di为Pi到仪器中心的斜距
图2(a)为单条扫描线上的所有点按照扫描顺序求出点到仪器中心的水平距离分布图。根据点云分类对此进行分析:

图2 单条扫描线距离直方图
1) 建筑物。由于大部分建筑物都具有垂直几何特性,因此这部分激光点到扫描仪的水平距离为定值,在图上显示为水平线段,由于建筑物上一般会存在楼梯或阳台,因此在水平线段附近通常会有部分短线段存在。
2) 地面点。由于扫描仪是等角度发射脉冲信号,地面点离仪器较近时,相邻点间距的变化速率比较缓慢,当与扫描仪间距变大时,相邻地面点间距的变化速率会急剧增大,近似于指数分布。因此从图2(a)可以清晰地识别出地面点云。地面点处于整个点云数据中较低的区域,设定合适的高程阈值能够去除大部分地面点。
3) 其他地物点。像路灯、电杆等垂直于地面的地物,或是具有规则形状的地物(花池,广告牌等),在一定区间内也会呈线性分布,很难与建筑物区分开。
4) 噪声点。在扫描线上分布无规律,因此在图2(a)上是离散性分布。在对目标建筑物进行扫描时,一般会出现在建筑物后方。通过设定一个合适的距离阈值,可以在较短时间内将其中距离起伏较大的点判断为噪声点并予以去除。
图2(b)为对单条扫描线上的点进行一次滤波后所获取的点示意图,可以看出,在设置合适的阈值之后,可以滤除掉噪声点与地面点。由于其他地物点(路灯、广告牌等)自身结构的特殊性,因此这部分的点在进行一次滤波之后无法与建筑物区分开。对于车载扫描获取的点云数据,同一建筑物立面在不同扫描线上点到扫描中心的深度值相差不大,因此可据此提取出建筑物主平面,从而可将图2(b)中其他地物点(如车辆、树木等)滤除。然而固定式扫描仪获取的每一条扫描线上的建筑物立面点到仪器中心的距离是在不断变化的,因此很难确定出建筑物的主平面以区分其他地物点。
鉴于此,本文针对建筑立面点云数据的特点,提出了一种基于相邻扫描点角度间隔直方图的建筑立面提取方法,可以初步将建筑物点与其他地物点区分开。
三、基于相邻扫描点角度间隔直方图的建筑物立面数据提取
固定式三维激光扫描仪在扫描过程中,不管是水平角还是竖角,角度值都是连续变化的。因此三维激光点之间的空间连续性能够通过相邻点角度值的变化趋势来反映,建筑物立面及地面上相邻点间的角度差通常很小,而且此类点的数目在整个点云中占大多数。因此,本文通过生成相邻扫描点角度间隔直方图,转换成灰度影像,进而提取最大面域来实现建筑物立面信息的自动提取。由于地面点的Z坐标一般很小,而且相邻点间的Z坐标相差也很小,可据此将地面点滤除[9]。
1. 相邻扫描点角度间隔直方图
首先根据三维激光扫描仪的扫描范围确定角度格网大小,如本文试验所用的三维激光扫描仪的水平角扫描范围为0°~360°,竖角范围为-70°~90°。按照预先设定的角度格网大小(本文采用1°×1°),可以将整个扫描范围划分为360×160个格网区间[10];其次计出每个角度格网内激光点云的个数,生成相邻扫描点角度间隔的二维直方图,如图3(a)所示。在该直方图中,水平方向的刻度线表示水平角,处于同一个平面而又垂直于它的刻度线表示竖角,竖直向上的刻度线表示单位方格中扫描点的个数。直方图上矩形柱的高度和颜色都反映了单位方格中与邻近点之间的角度差小于给定阈值的扫描点的个数(图例中颜色从南到北的变化表示点数增加)。从直方图上可看出建筑物立面对应的矩形柱呈大面积的连续分布,因此可以根据这一分布特点从相邻扫描点角度间隔的二维直方图中快速提取建筑物立面。根据点数目设定阈值,滤除掉点云数目小于阈值的点集,保留点密度高的点集,图3(b)为滤波后的点数目二维直方图。为了便于处理,本文将二维直方图转换成灰度图像(灰度根据直方图中矩形柱的高度进行量化,黑色到白色表示矩形柱高度的增加),如图4所示。因此,建筑物立面的提取就简化成了对灰度图像面域的提取[11]。

图3 相邻扫描点角度间隔的二维直方图

图4 由二维直方图转换的灰度图像
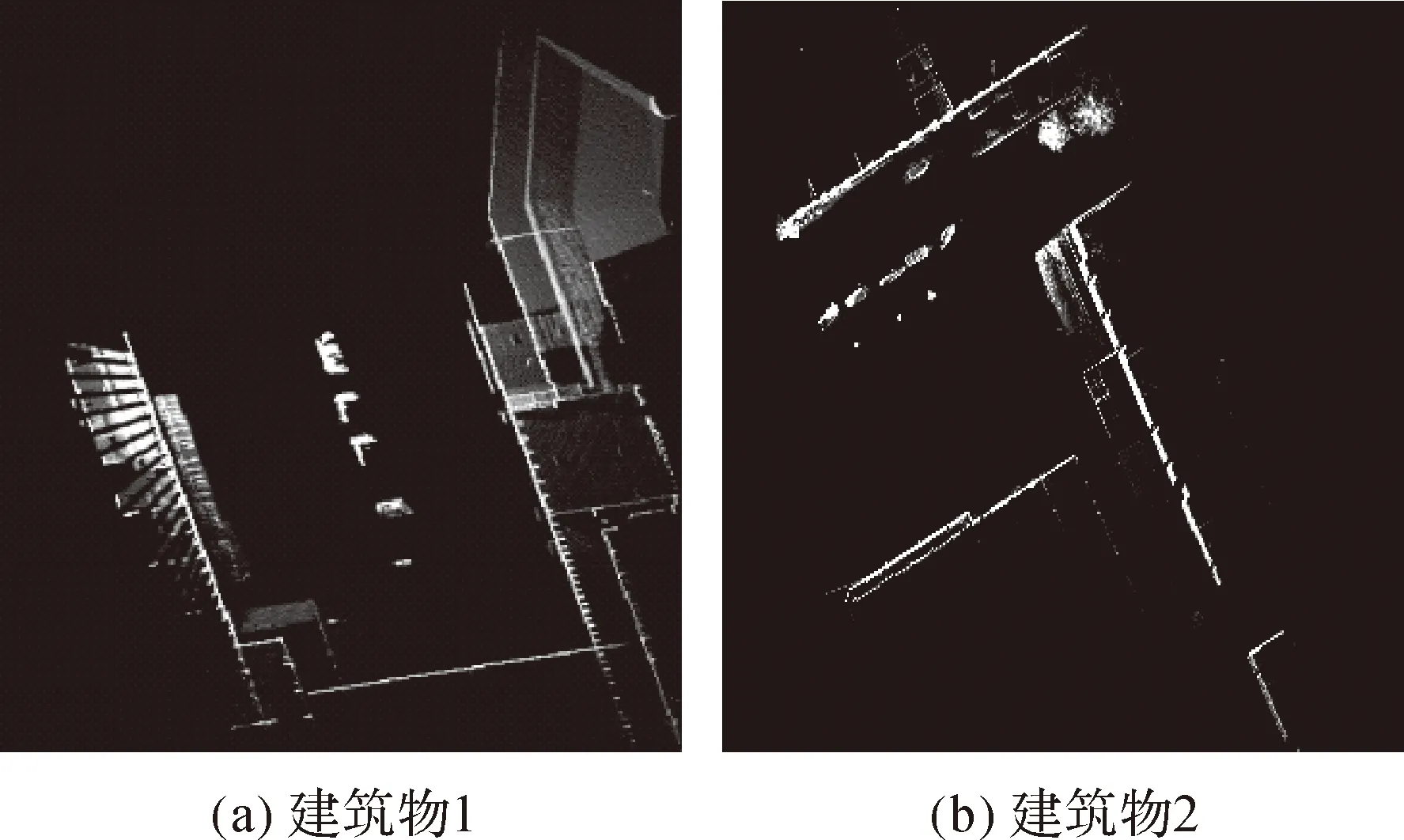
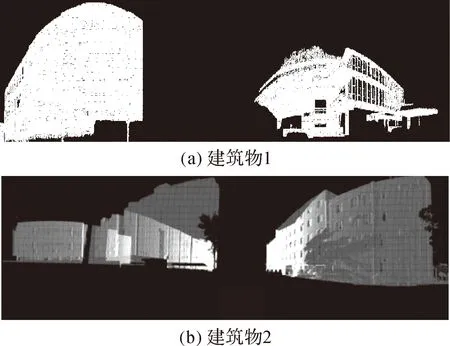
2. 建筑物立面数据提取
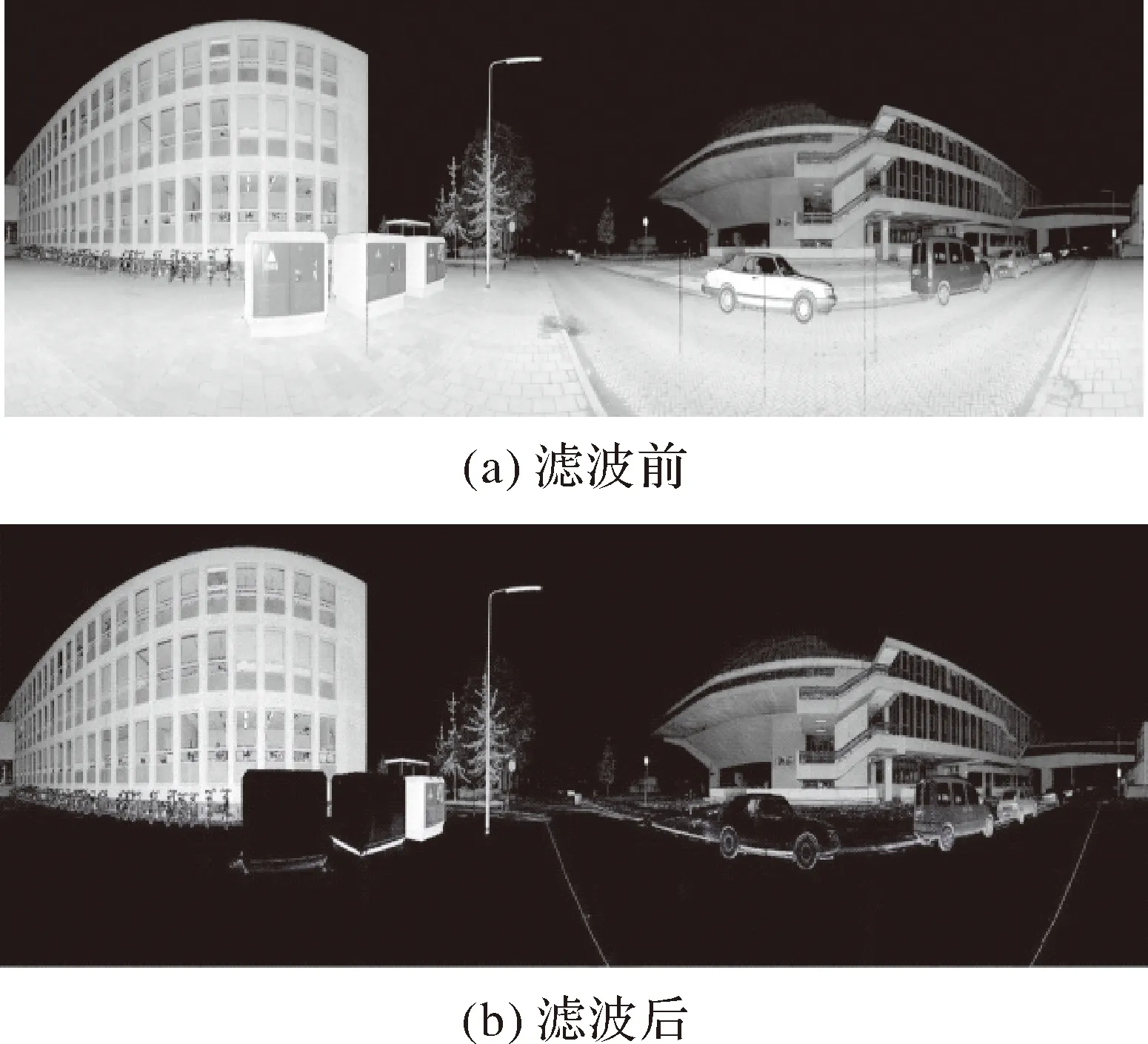
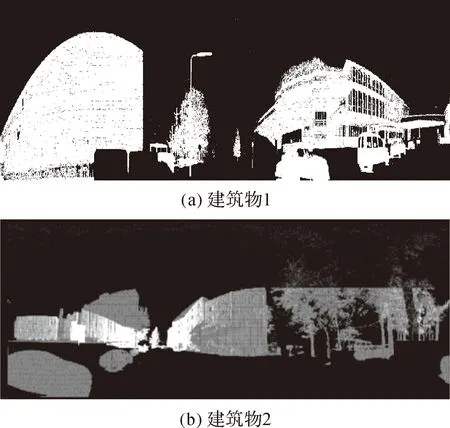
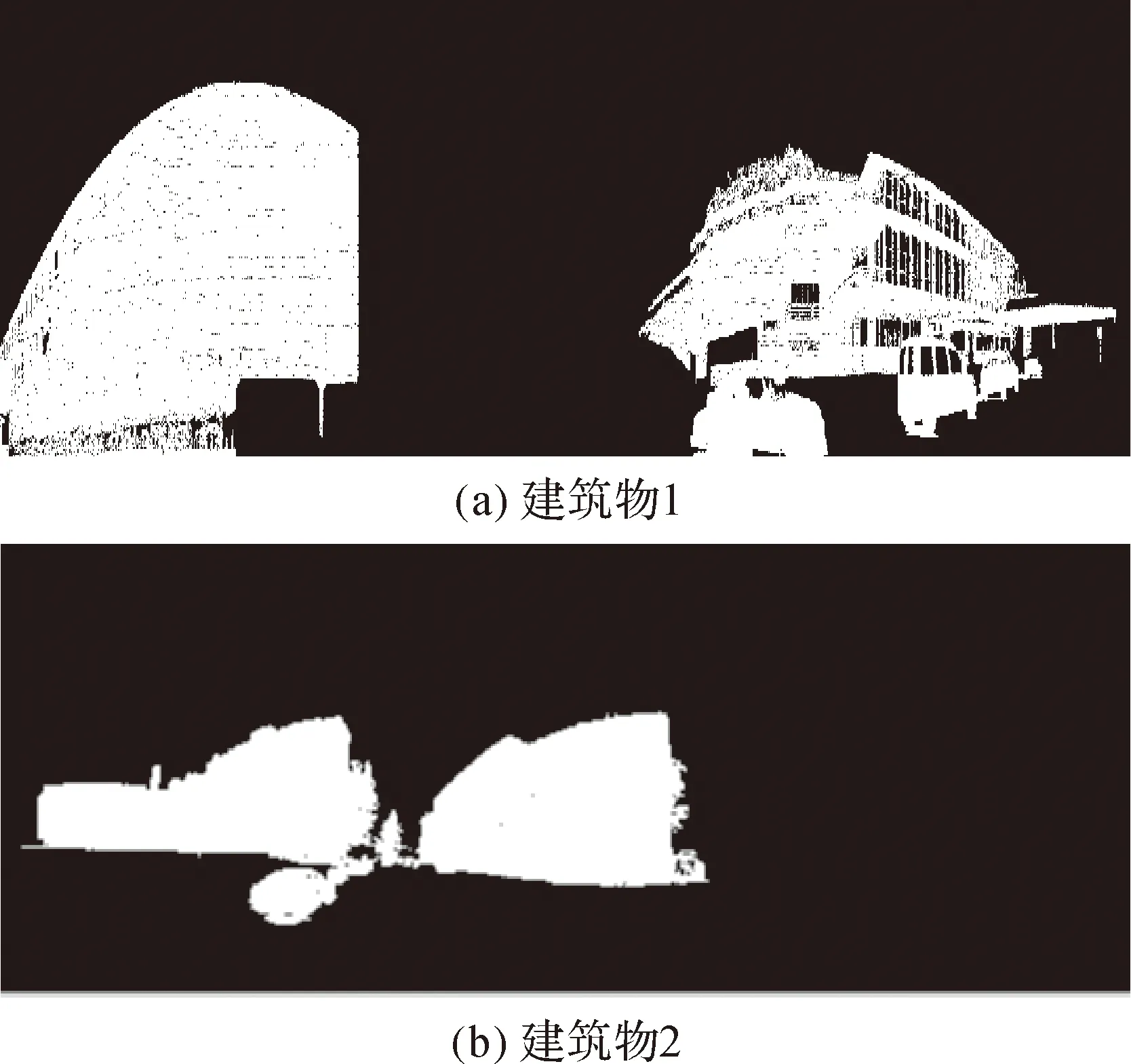
考虑到由二维直方图转换成的灰度图像上边界不如常规黑白影像边界明显突出,本文对灰度图像进行二值化,在二值图像中进行连通区域标记[12]。常用的连通有4连通和8连通两种。4连通选取目标像素的上下左右4个相邻像素,8连通选取目标像素的左上、上、右上、左、右、左下、下、右下8个相邻像素。如果目标像素的灰度值与周围相邻的像素某一个像素的灰度值相等,则认为目标像素与该像素具有连通性。如果4个相邻像素中有m(1 图5 直方图法建筑物立面提取 由于视角原因,这样处理的结果很有可能会将一些原本不属于建筑物立面的点也映射到影像上,如图5(b)矩形框中所示部分,因此对这之后的点云数据还需要用格网化的方法进一步提取立面信息。 3. 格网化提取建筑物立面信息 地面式激光扫描仪与机载扫描系统不同,可以近距离获取到建筑物立面的点云数据,而绝大部分建筑物都具有垂直几何特性,据此,将具有三维空间信息的点云垂直投影到XY平面,建筑物将会在投影面上呈条带分布,对XY平面进行格网化分割,以区分不同区域投影点密度差异,通常单次扫描区域有限,因此不需要考虑地球曲率影响,由此可以清晰地显示不同地物之间的连通关系,进而区分出建筑物及其他地物的激光点云[15]。 本文将具有三维坐标的扫描点垂直投影到二维平面,通过多组试验检验,考虑计算速度及变换后精度问题,格网宽度为0.1m效果最好,本文按照0.1×0.1m区间大小对投影二维平面进行格网化,统计落入每一个格网的激光点数,按比例分配像素值,对生成的影像进行连通区域标记,找寻面积及点密度最优的区域就是建筑物立面信息。从图6可以看出,通过此方法可以将树木、车辆等目标物剔除。 图6 建筑物垂直投影示意图 4. 试验结果 本文分别对两套数据作了试验,建筑物1是利用FAROLS880三维激光扫描仪采集的点云,扫描角分辨率为0.036°,包含3300万个激光点三维坐标。 建筑物2是利用RIEGLVZ-400 获取的首都师范大学宿舍楼点云数据,扫描角分辨率为0.086°,包含780万个激光点三维坐标。 利用前文所述基于扫描线的方法对建筑物立面进行了提取试验,结果如图7所示,为了便于识别,点云以全景反射值影像的形式显示,由于其他地物点如广告牌、电杆等在局部范围内自身结构存在的特殊性,因此比较提取前后的反射值影像,可以看出这部分的点无法与建筑物立面区分开。 图7 建筑物1全景反射值影像 本文利用前文所述方法对由二维直方图转换的灰度图像(如图8所示)进行建筑物立面提取,先对灰度影像进行二值化处理,剔除一部分点密度较小的点云;然后再进行连通区域标记,提取出面积最优的连通区域(如图9所示)。 图8 建筑物相邻扫描点角度间隔灰度图 图9 最优连通区域提取 从图9中可以明显看出,仍有一部分点云数据(如树木、汽车等)没有滤除掉,因此还需要再对滤除后的数据进行格网化,如图10所示,图中(a)和(b)分别为建筑物1、2处理前的点云正射投影。找寻面积及点密度最优的区域就是建筑物立面信息,如图11所示。图12为得到的建筑物点云反射值影像,与处理之前的图8相比,去除了大量冗余数据点,大大简化了三维建模等后续工作,可直接进行建筑物的分割、拟合及变化检测的处理。 图10 格网化提取前 图11 格网化提取后 图12 提取的建筑物立面图 本文针对建筑立面点云数据的特点,在分析固定式和移动式激光扫描在原理上的差别基础上,首次提出了一种基于相邻扫描点角度间隔直方图的提取方法。试验表明,以扫描角度的连续性代替三维激光点之间的空间连续性,能够避免建筑物立面的提取受到深度变化及由此产生的空间分辨率差异的影响。此外,建筑物立面在直方图上面积占优的特性,也使得它与其余地物具有非常好的可区分性。由于只将扫描角度作为运算对象,因为避免了对离散激光点的三维坐标进行运算。本文所提方法能够对海量点云中的建筑物立面数据进行有效的预提取,有利于提高后续建筑物分割拟合、三维建模及变化检测等处理的效率和稳定性。 [1]MANANDHARD,SHIBASAKIR.Vehicle-borneLaserMappingSystem(VLMS)for3-DGIS[J].GeoscienceandRemoteSensingSymposium, 2001 (5):2073-2075. [2]MANANDHARD,SHIBASAKIR.FeatureExtractionfromRangeData[C]∥22ndAsianConferenceonRemoteSensing.Singapore:[s.n.],2001. [3]徐逢亮,李树楷. 基于激光测距的航空扫描影像中的建筑物自动提取[J].遥感学报,1999,3(3):171-174. [4]李必军,方志祥,任娟.从激光扫描数据中进行建筑物特征提取研究[J].武汉大学学报(信息科学版),2003,28(1):65-70. [5]杨洋,张永生,马一薇,等. 基于扫描线的车载激光雷达点云滤波方法[J]. 测绘科学技术学报,2014, 27(3) :209-212. [6]史文中,李必军,李清泉. 基于投影点密度的车载激光扫描距离图像分割方法[J]. 测绘学报,2005,34(2):95-100. [7]FRUEHC,JAINS,ZAKHORA.DataProcessingAlgorithmsforGeneratingTextured3DBuildingFacadeMeshesfromLaserScansandCameraImages[C]∥InternationalSymposiumon3dDataProcessingVisualizationandTransmission.[S.l.]:Springer,2002:834-834. [8]闫晨. 三维激光实景技术在智慧城市建设中的应用[J]. 测绘通报, 2016(4):142-143. [9]杨茂伟. 三维激光扫描仪在地质灾害地形测绘中的应用[J]. 测绘通报, 2016(5):145-146. [10]李敏. 三维激光扫描技术在古建筑测绘中的应用[J]. 北京测绘, 2014(1):111-114. [11]李长春, 薛华柱, 徐克科. 三维激光扫描在建筑物模型构建中的研究与实现[J]. 河南理工大学学报(自然科学版), 2008, 27(2):193-199. [12]姜如波. 基于三维激光扫描技术的建筑物模型重建[J]. 测绘通报, 2013(s1):113-116. [13]张鸿飞,程效军,贾东峰,等. 多视点散乱点云配准及压缩改进算法研究 [J].测绘通报,2012(2):43-47. [14]卢秀山,黄磊.基于激光扫描数据的建筑物信息格网化提取方法[J]. 武汉大学学报(信息科学版),2007,32(10):852- 855. [15]官云兰,程效军,詹新武,等. 地面三维激光扫描仪系统误差标定[J].测绘学报,2014(7):731-738. Automatic Extraction of Building Facade Segments from 3D Laser Scanning Point Clouds LIN Hui,WANG Lijuan,KANG Zhizhong,TIAN Yanfeng,SHAO Congying 林卉,王李娟,康志忠,等.三维激光扫描建筑物立面数据的自动提取[J].测绘通报,2016(10):25-30.DOI:10.13474/j.cnki.11-2246.2016.0322. 2016-06-27; 2016-09-11 国家自然科学基金(41171358;41401397);江苏省自然基金青年项目(BK20140237) 林卉(1973—),男,副教授,主要研究方向为遥感数据处理、高等测绘教育改革。E-mail:linhuixznu@126.com P234.4 B 0494-0911(2016)10-0025-06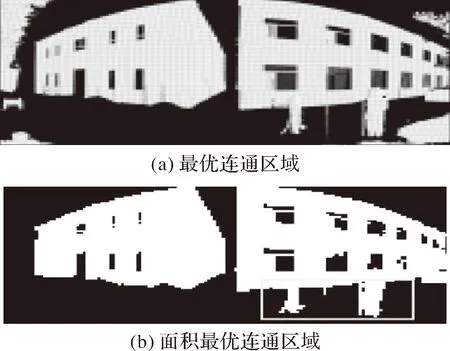


四、结束语
