运动单站短基线时差定位方法
2016-11-11马福和郭福成
马福和,张 敏,郭福成,刘 洋
(国防科学技术大学电子科学与工程学院,湖南 长沙 410073)
·技术前沿·
运动单站短基线时差定位方法
马福和,张敏,郭福成,刘洋
(国防科学技术大学电子科学与工程学院,湖南 长沙 410073)
对于时宽带宽积较大的信号,以短基线即可获得高精度的时差,从而实现辐射源高精度定位。提出了一种基于单个运动平台的短基线到达时差(TDOA)定位体制,针对到达时差观测量与辐射源位置的高度非线性关系,提出了一种基于高斯牛顿迭代的定位解算方法,并对该定位理论误差下限(CRLB)进行了分析。计算机仿真对方法的收敛性能、定位误差进行了分析和验证。
时差;定位;定位误差;克拉美罗限
0 引言
利用被动接收的辐射源信号确定其位置的无源定位技术,在电子侦察、监视和人员搜救等诸多民用和军事领域中具有广泛应用[1]。常用的运动单站无源定位技术中,利用干涉仪测相位差的辐射源定位技术较为常见,包括基于干涉仪测向[2-3]和干涉仪相位差直接定位技术[4-7]等。干涉仪基线长度越长,则对应的定位精度越高。但是随着基线的增长,基于相位干涉仪体制的定位方法模糊问题尤为严重,消除相位差的模糊是相位干涉仪定位技术的关键问题。
已有的多种解相位差模糊方法中,利用多通道阵列干涉仪解相位差模糊测向的定位方法需要多通道。随着基线增长,该方法对天线阵元的数量要求会更高,系统设备复杂度高、代价巨大且通道间存在幅相不一致的问题;基于观测器机动的相位差直接定位方法,仅需单基线即可实现定位,系统构成简单,定位精度较高。但较长的干涉仪基线会导致定位模糊点的数量增多,从而使得计算的复杂度大幅增加,需要很长的时间积累来消除模糊;利用单个基线的旋转来消除相位差模糊的旋转干涉仪相位差定位方法,其定位原理和观测器机动的定位原理相同,该方法仅靠干涉仪的旋转即可产生较大程度的基线时变。但是实现干涉仪的旋转工程上难度较大,同样存在相位差模糊严重、定位模糊点数量多的问题。
相比于相位差定位,利用脉冲信号的到达时差定位方法,具有观测量无模糊的特点。为了实现时差高精度定位,传统的时差定位通常需要空间上分隔开的多个观测站。这对多观测站之间的时间同步、数据传输提出了较高的要求。另外,观测站之间间隔越远,定位精度越高,而对于越来越广泛使用的窄波束辐射源(如相控阵雷达),多个观测站可能无法形成时差,从而导致定位失效。
对时差测量理论误差下限的分析可知,时差的测量精度与信号的带宽和时宽有着密切的关系:信号的带宽和时宽越大,时差的测量精度越高[8]。因此对于具有较大时宽带宽积的辐射源信号,时差的测量精度可达到很高,这就使得在单个观测平台上利用短基线即可实现对辐射源的高精度定位。单站短基线时差测量与传统多站时差定位相比,不存在不同观测站之间的时间同步误差,从而可消除时间同步引入的时差测量误差,实现高精度定位。相比于干涉仪定位方法,由于时差测量不存在模糊,因此无需解相位差模糊的多通道、系统结构更为简单。
本文针对大时宽带宽积辐射源,提出了一种基于运动单站的短基线时差定位体制,通过安装于运动观测站上的短基线测时差实现对辐射源的高精度定位,针对时差与辐射源位置的高度非线性关系,采用高斯牛顿迭代的方法求解辐射源的位置,进一步对比了不同机动方式下的定位性能,并对该定位体制的收敛特性、定位误差特性进行了分析。
1 运动单站仅时差定位方法
1.1短基线时差定位原理
运动单站仅时差定位的基本原理如图1所示。对于运动的观测站,每一个辐射源脉冲时刻测量得到的时差都对应着一条双曲线Li,其中i表示脉冲的序号,图中的三条双曲线只是一个示例。辐射源应该位于每一个时刻的双曲线上,从而在辐射源静止的条件下,多个时差双曲线应交于辐射源处。
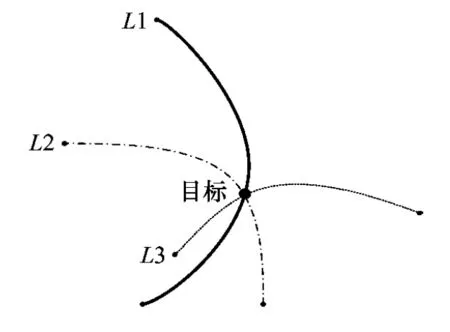
图1 运动单站仅时差定位原理
1.2信号时差测量精度
对于单站仅时差定位,受工程和实际情况的限制,单个平台上基线的长度受限,因此时差的高精度测量对高精度定位至关重要。
文献[8]中给出了时差测量的理论误差下限:
(1)
式中,B表示信号的带宽,T表示信号脉冲的时宽,SNR表示信噪比。
表1给出了AN/SPS48型号雷达信号时宽为9μs时,信噪比为15 dB时,对于不同的信号带宽时差测量的理论误差下限。

表1 不同带宽信号的理论时差CRLB
从表1中可以看出,随着信号带宽的增大,时差的测量精度也随之显著提高。文献[9]提出了一种针对复合调制雷达信号的拟合插值高精度时差测量方法,可以进一步提高基于相关算法的时差测量精度。因此对于大时宽带宽积信号,时差的测量精度可以达到纳秒量级,从而直接采用本文的时差定位方法实现辐射源定位。
1.3运动单站仅时差定位模型
如图2所示的三维直角坐标系中,辐射源t位于零高程XY水平面上,其坐标可以表示为矢量Xt=[xt,yt,zt]T,短基线固定安装在运动平台观测站o上,两天线A1和A2分别位于其两端。观测站在一定的高度上作速度为v的机动,在i时刻其坐标为Xo,i=[xo,i,yo,i,zo,i]T。设短基线长度为d,不失一般性地,假设运动观测站平行于水平面机动且短基线垂直于运动观测站的速度方向并与水平面平行。随着观测站的运动,可以测量得到辐射源到达两个天线的一系列时差为:
(2)

图2 运动单站短基线时差定位场景示意图

(3)
单站仅时差定位即是利用多次测量得到的时差值ti估计出辐射源t的位置。
1.4高斯牛顿迭代时差定位
短基线随着观测站的运动,在观测时间内接收到某辐射源的多个脉冲,从而可以得到每个脉冲的到达时差ti,其中i=1,2,…,N,N表示接收到的辐射源脉冲总数。可以得到向量形式的时差方程组:
(4)
式中,T=[t1,t2,…,tN]T表示时差观测矢量,εt=[εt,1,εt,2,…,εt,N]T表示时差测量误差矢量。而F(x)=[f1(x),f2(x),…,fN(x)]T表示辐射源位置x处对应的时差预测矢量,且:
(5)

根据辐射源位于零高程水平面上的先验信息,其z坐标为零,从而可将该问题简化而视为二维坐标系下的定位问题,辐射源的位置可简化表示为矢量x=[xt,yt]T,由于时差观测量与辐射源的位置之间是非线性的关系,且时差是不模糊的,所以可以直接采用非线性高斯牛顿迭代方法对辐射源位置进行迭代估计。将式在辐射源位置处一阶泰勒展开,从而得到[10]:
(6)
式中,xk表示第k次迭代后的辐射源位置矢量,F′(xk)表示雅克比矩阵,即时差矢量对辐射源位置的偏导数矩阵,经过若干次迭代即可得到辐射源的估计位置。
当存在多个辐射源时,接收到的脉冲串是多个辐射源的脉冲混叠而成的,此时需要将各个辐射源的脉冲进行有效的分选进而对多个辐射源逐一定位。当多个辐射源位置差异较大时,如果可以获得多个辐射源粗略位置的先验信息,那么多个辐射源脉冲的配对可以借助辐射源空间位置的稀疏性来解决。给定第i个时差测量值ti,以及当前已知的K个辐射源的粗略位置信息xk,k=1,2,3,…,K,那么认为第i个脉冲属于第m个辐射源,其中m满足:
(7)
式中,min(·)表示取最小值。从而可以对配对后的脉冲分别采用高斯牛顿迭代法进行辐射源的逐一定位。
2 定位误差理论误差下限(CRLB)2.1 CRLB的推导
根据文献[11]对CRLB的定义,可得定位误差的理论误差下限为:
(8)
式中,I为费舍尔信息阵,其定义为:
(9)
式中,J为雅克比矩阵,即观测时差对辐射源位置矢量的偏导数:
(10)
式中,
将式(9)、(10)代入式(8),从而可以得到CRLB。
2.2定位的收敛问题
在定位结果收敛的情况下,本文的定位问题等同于最优化问题:
(11)
式中,C(x)为代价函数,定义为:
(12)
由于时差噪声服从零均值高斯分布,且时差具有无模糊的性质,该代价函数将在真实辐射源处产生单个尖峰。因此定位的最大似然解无偏且一致趋近于有效估计。尽管解析上很难得到最大似然估计量,但是根据文献[11]可知,牛顿迭代法在算法收敛的条件下得到的解等效于最大似然估计。因此随着积累脉冲数N的增加,非线性高斯牛顿迭代结果将一致趋近于最大似然估计,从而其RMSE将与CRLB一致。
当时差测量误差超过一定的门限时,本文的定位解将呈现发散状态,此时定位的RMSE将无法达到CRLB。
3 计算机仿真
通过计算机仿真,对本文方法的定位性能进行分析。假设辐射源位于XY水平面上,坐标为(5,-5,0)km,辐射源信号频率为3GHz,脉冲重频固定且为50Hz,运动观测站高程为100km且在观测时间内保持高程不变,观测站负载的长度为10m的基线水平安装在观测站上,从而其平行于定位坐标系水平面,基线指向与观测站运动方向垂直。其中仿真采用的Monte-Carlo次数为2000。为评估本方法的定位精度,定义定位均方根误差为:
(13)
式中,C为定位的误差协方差矩阵,有:
(14)
式中,x0为辐射源位置真实值,xi为第i次仿真的辐射源位置估计值。
3.1不同观测器机动方式下的定位误差分布
采用文献[10]的随机水平定位误差的定义:
(15)
在时差测量误差为6.5ns条件下,观测站分别绕(0,0,100)km的点以5km为半径作一整周的圆周运动、以(0,0,100) km为中心作幅度为5km的正弦曲线蛇形运动、以(0,0,100)km为中点沿X轴方向作直线运动,速度与圆周运动的平均速度相同。3种情况的运动时间均为50s,从而接收到的辐射源脉冲个数均为2500个,对辐射源定位的精度与辐射源位置的关系分别如图3(a)~(c)所示,其中“x”表示的是观测器的运动轨迹。
可以看到,在3个不同的运动观测站机动场景中,随着辐射源与观测站运动轨迹中心在水平面投影的距离增加,定位误差也逐渐增加。在圆形机动和蛇形机动情况下,对于观测站水平面投影周围100 km半径区域内辐射源,其定位相对距离误差[10]接近或小于1%,对200 km半径区域内辐射源的定位相对距离误差小于3%;而采用直线机动定位时,在观测站运动轨迹线的两端定位的精度急剧恶化,因为该直线两端区域的辐射源到运动观测站短基线的入射角度接近90°,此时时差的可观测性极差,所以该机动方式下无法有效对辐射源定位。而且直线机动时,观测器运动轨迹线两侧的位置定位精度也较圆形机动要差。圆形机动和蛇形机动由于观测站运动方向时刻变化,导致基线大幅度时变,从而使得其定位精度较直线机动大大提高。由此可知,观测站作圆周机动可以得到较好的定位效果,且机动方式较蛇形更为简单。所以以下仅针对圆周机动情况作进一步分析。

图3 不同机动方式下定位误差分布
3.2仅时差圆形机动定位性能分析
3.2.1定位精度随观测时间变化
基线长度10m,在时差测量误差为6.5ns条件下,观测站作圆周机动,圆周运动周期同样为50s,半径为5km。保持其它仿真条件不变,仿真定位精度随观测时间的变化情况并与理论误差下限进行比较,结果如图4所示。
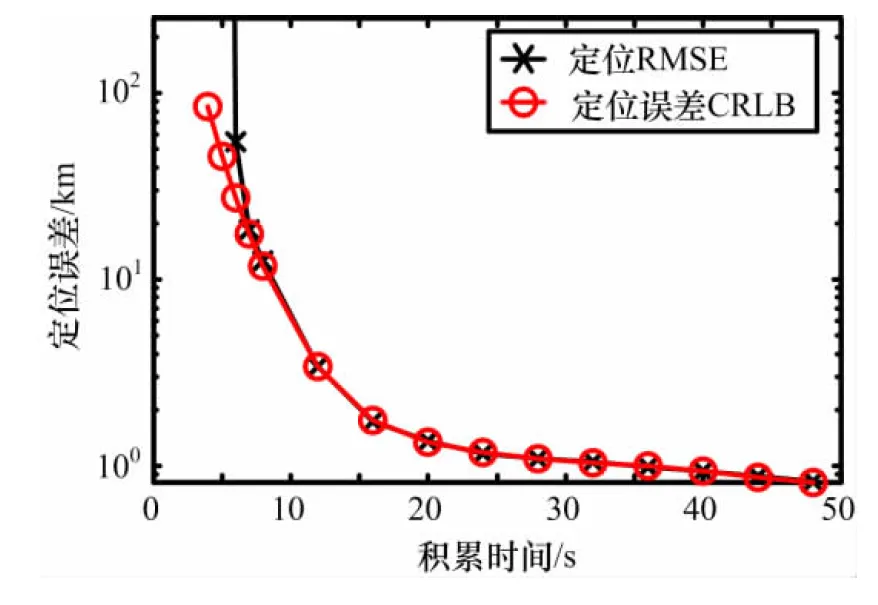
图4 定位精度随观测时间变化
可以看到,当积累时间较短时,系统的可观测性较差,此时定位误差较大,呈发散状态。这是因为此时基线的时变程度并不明显。随着观测时间的增加,定位精度逐渐增高且定位RMSE与CRLB趋于一致。
3.2.2定位精度随时差测量误差变化
观测器作圆周机动,圆周运动的周期为50s,观测时间为25s,保持其它仿真条件不变,在不同的时差测量误差下仿真本算法采用不同长度基线的辐射源定位性能并与理论误差下限进行比较,结果如图5所示。
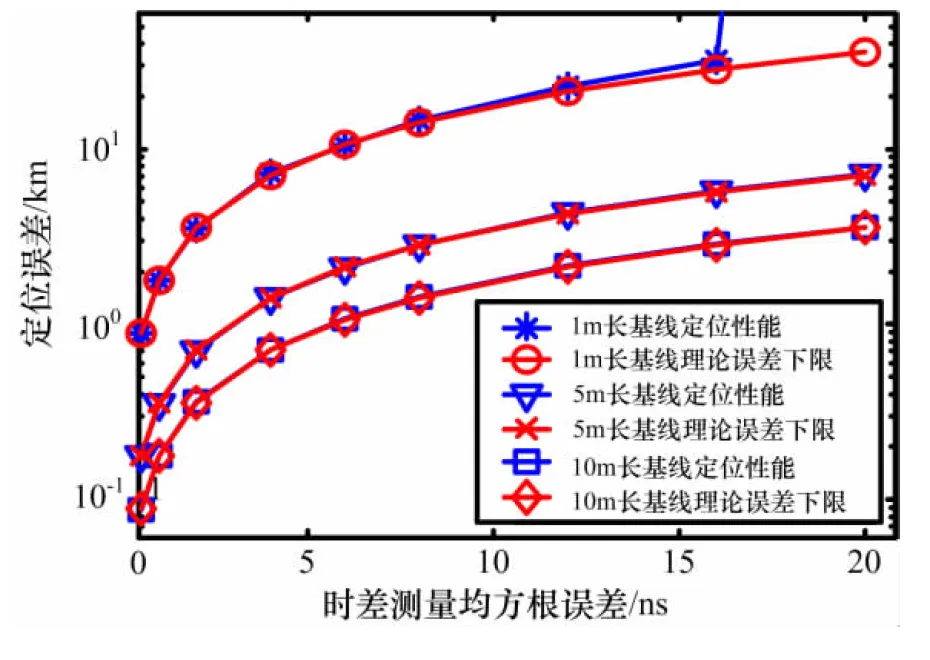
图5 时差测量误差对定位影响
从图5可以看到随着时差测量误差的增大,定位误差显著提高,另一方面,随着基线长度的增加,相同时差误差条件下的定位精度随之提高,这是因为更长的基线可以适应更大的时差测量误差。而且在基线较短(例如1 m)情况下,时差误差较大会带来定位发散的问题,使得定位RMSE逐渐偏离CRLB并急剧升高。因此在工程上允许的条件下,采用更长的基线可以获得更高的定位精度并抑制发散问题。
3.3定位结果收敛性分析
辐射源位于(100,0,0)km,观测站作圆周机动,其他的仿真条件不变。通过仿真得到,在不同的积累时间下,要达到1%R、2%R的定位精度和定位发散(定位RMSE高于定位误差CRLB)时的大致时差测量误差门限,如表2所示。
从表2中可以看到,在其他条件不变的前提下,随着积累时间的增长,定位体制对时差误差的适应能力逐步增强。因此,在其他条件不变时,提高观测积累时间或提高时差测量精度均可以提高定位精度和抑制发散问题。

表2 各种定位性能对应的时差测量误差门限
4 结束语
本文给出了一种基于运动观测站的短基线仅测时差辐射源定位体制,分析了定位的收敛特性和时差测量误差带来的定位误差。对于大时宽带宽积信号,可以获得较高的时差测量精度从而实现较高精度的辐射源定位,在定位收敛的条件下,该定位方法误差与理论误差下限相吻合。■
[1]孙仲康,郭福成,冯道旺,等.单站无源定位跟踪技术[M].北京:国防工业出版社,2008.
[2]龚文斌,冯道旺,谢恺,等.星载测向定位系统误差的自校正方法研究[J].航天电子对抗,2005,2(21):25-30.
[3]袁孝康.遥感卫星对地面目标测向定位研究[J].空间电子技术,2005(2):1-9.
[4]Carlsen EC,Kolanek JC,Sharpin DL.Airborne very long baseline interferometry and geolocation[C]∥ Waltham, Massachusetts,USA:Fourth IEEE Workshop on Sensor Array and Multichannel Processing,2006: 334-338.
[5]Rose CM. Method for single satellite geolocation of emitters using an ambiguous interferometry array[P].United States of America,US 7436359B1, 2008.
[6]张敏,郭福成,周一宇,等.运动干涉仪相位差直接定位方法[J]. 航空学报,2013,34(9): 2185-2193.
[7]李腾,郭福成,姜文利.基于旋转干涉仪模糊相位差的多假设NLS定位算法[J].电子与信息学报, 2012(4): 956-962.
[8]Whalen AD.Detection of signals in noise[M]. New York: Academic Press, 1971.
[9]熊鹏,柳征,姜文利.复合调制雷达号时差估计算法[J].雷达学报,2015,4(4):460-466.
[10]郭福成,樊昀,周一宇,等.空间电子侦察定位原理[M].北京:国防工业出版社, 2012.
[11]Kay SM.Fundamentals of Statistical Signal Processing, Estimation Theory[M]. Englewood Cliffs, New Jersey: Prentice Hall, 1993.
Short-baseline TDOA localization method using a single moving observer
Ma Fuhe, Zhang Min, Guo Fucheng, Liu Yang
(College of Electronic Science and Engineering,National University of Defense Technology,Changsha,Hunan 410073,China)
Considering a signal with large time-bandwidth product, it is easy to obtain the TDOA of high precision with short baseline so that they can be utilized for emitter localization.A method utilizing the time difference of arrival (TDOA) of short baseline on single moving observer is proposed to determine the location of an emitter.Aiming at resolving the high degree of nonlinearity between the TDOA and the location of the emitter, the nonlinear gauss newton recursive algorithm is proposed.The CRLB of this localization method is then analyzed. Simulations by computer analyze the convergence and localization of the method and confirm the correctness of the method and conclusion.
TDOA;localization;localization error;CRLB
2016-01-29;2016-04-14修回。
马福和(1991-),男,硕士研究生,主要研究方向为信号处理、无源定位技术。
TN97
A