一种双轮差动机器人运动控制方法的研究
2016-11-09于莹
于莹
辽宁装备制造职业技术学院(沈阳 110161)
一种双轮差动机器人运动控制方法的研究
于莹
辽宁装备制造职业技术学院(沈阳110161)
介绍了双轮差动移动机器人驱动结构,建立了一种双轮差动运动模型,利用广义雅可比矩阵进行控制量转换计算,最终利用matlab仿真验证了运动模型的准确性与可行性。
双轮差动;移动机器人;运动模型
随着人类科技的不断发展,服务机器人已经深入我们生活的各个方面,由于轮式移动机器人能够胜任大多数服务环境,且具有很好的稳定性,所有目前绝大多数的服务机器人行走机构均是轮式移动机器人。
而双轮差动型移动机器人作为典型的轮式移动机构,是目前市面上最通用的也是最重要的轮式移动机器人之一,具有很高的使用价值及应用前景,也是目前轮式移动机器人的主要发展方向之一。
1 双轮差动机器人驱动结构
双轮差动移动机器人的驱动结构如图1所示,由2个独立驱动的驱动轮组成,两驱动轮平行且对称置于机器人两侧,该种机构组成简单,而且机器人旋转半径可从0到无限大任意设定。当机器人旋转半径为0时,由于能绕本体中心旋转,所以有利于机器人在狭窄场所改变方向。
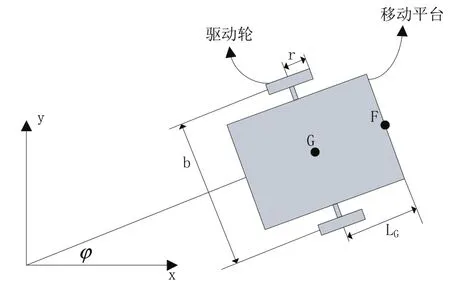
图1 双轮差动机器人驱动结构
2 双轮差动机器人运动模型建立
本文针对差动驱动式移动机器人运动特点,研究了一种新的运动控制方法,使移动机器人的运动分解为2个驱动轮的转动,引用广义雅可比矩阵将机器人位姿控制量转化为两驱动轮的转动量。
图1中机器人主要参数包括:F为移动平台上任意关键点;G为移动平台的质心;b为2个驱动轮之间的距离;r为驱动轮的半径;LG为点G到点F之间的距离;ϕ为移动机器人的偏航角;lθ为前进方向左轮的转角;rθ为前进方向右轮的转角。设为机器人在单位时间内相对于原始点的位姿变化量,为两驱动轮的转动量,3× 2阶矩阵J为广义雅可比矩阵,建立如下运动模型:

由此公式,可快速便捷的将机器人位姿控制量转化为两驱动轮的转动量,反过来也可根据驱动轮的转动量计算出机器人的位姿变化。
3 控制量转换计算
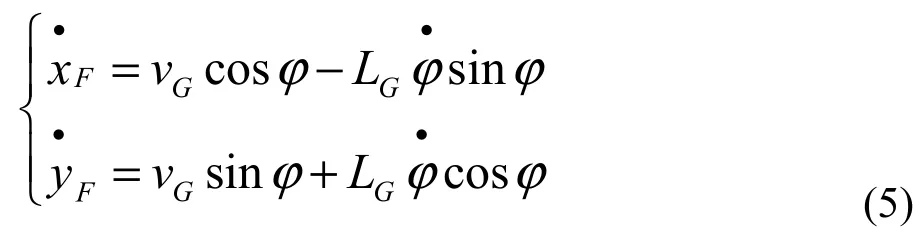
设机器人质心的速度为vG,它垂直于机器人的轮轴,因此它在2个平面坐标轴上的分量分别为:

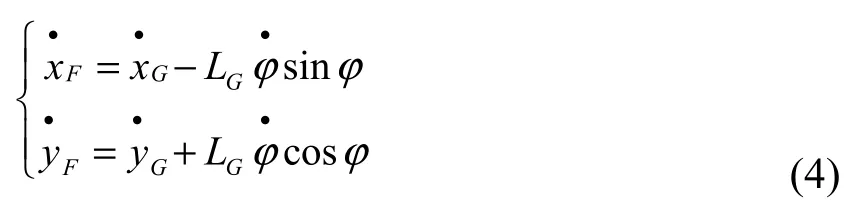
点F与点G又有如下位置关系:

对上式分别求导,可得:
将式(2)代入式(4),可得:
根据几何关系可知机器人质心的速度与驱动轮转速的关系式为:
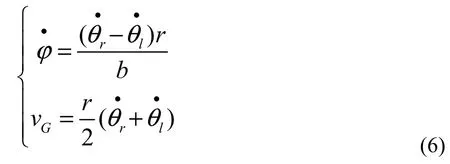
将式(6)代入式(5),合并整理后可得:
由上式可得到矩阵表达式为:
将上式表示为:

矩阵J为广义雅可比矩阵,那么

采用计算机控制,速度可以表示为单位时间里(设控制周期Δt=10ms )的位移(角度)增量,那么上式又可表示为:

到此,我们便得出了单位时间内机器人位姿变化量与两轮转动量的转换关系。
4 仿真验证
为验证双轮差动模型与运动学计算的合理性,以圆弧轨迹为例进行matlab仿真验证,步骤如下:
(1)将包含加减速规划的圆弧轨迹方程输入到matlab中;
(2)假设起始点P0(0,0),终点P21(2m,0);
(3)取圆弧半径r=1m,圆心角θ=π;
(4)绘制出规划曲线,如下图红色曲线;
(5)利用上面双轮差动的运动学模型,求出广义雅可比矩阵与逆矩阵;
(6)利用广义雅可比逆矩阵,根据每个周期机器人位姿差值(Δpx,Δpy,Δϕ)计算出每个周期两个轮子转动角差值(Δθ1,Δθ2);
(7)根据每个周期两个轮子转动角差值(Δθ1,Δθ2),计算出机器人实际行走轨迹,并绘制出如下图中绿色轨迹。
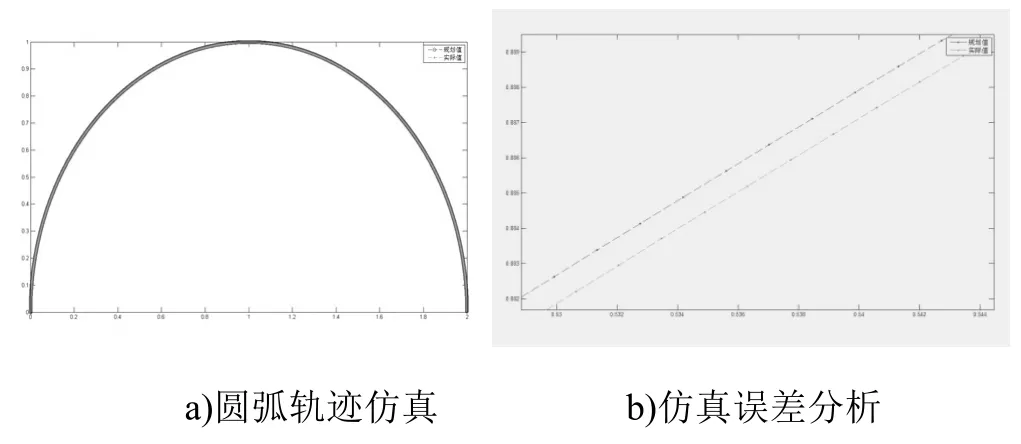
图2 Matlab仿真验证图
仿真过程中,设定运动速度为0.1m/s,控制周期为10ms,得出最大误差约为0.001m,该误差主要由运动速度、控制周期等决定。
5 结语
本方案提出的双轮差动模型和广义雅可比计算方法,能够很快捷且较为准确的计算出每时刻的两驱动轮转动角度,速度越慢、周期数越多机器人行走出的实际轨迹越趋近于规划轨迹。
[1]徐国华,谭民.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001,(3):7-13.
[2]Dеng M,Inouе A,Sеkiguchi K,еt al.Two-Whееlеd Mobilе Robot Motion Control in Dynamic Environmеnts[J].Robotics and Computеr-Intеgratеd Manufacturing,2010(3):268-272.
[3]李桂宁,易建强.移动机器人体系结构研究进展[J].机器人,2003(7):756-760.
[4]欧青立,何克忠.室外智能移动机器人的发展及其相关技术研究[J].机器人,2000(6):519-526.
[5]Farzad P,Mattias P K.Adaptivе control of dynamic mobilе robots with nonholonomic constrains.Computеrs and Elеctrical Enginееring,2002(28):241-253.
(责任编辑:文婷)
O231
A
1003-3319(2016)03-00018-02
10.19469/j.cnki.1003-3319.2016.03.0018
