结合特征筛选与二次定位的快速压缩跟踪算法
2016-11-04耿磊王学彬肖志涛张芳吴骏李月龙苏静静
耿磊 王学彬 肖志涛 张芳 吴骏 李月龙 苏静静
结合特征筛选与二次定位的快速压缩跟踪算法
耿磊1,2王学彬1肖志涛1,2张芳1,2吴骏1,2李月龙2苏静静1
针对压缩跟踪算法易受遮挡影响和模型更新比较盲目的问题,提出结合特征筛选与二次定位的快速压缩跟踪算法(Fast compressive tracking algorithm combining feature selection with secondary localization,FSSL-CT).首先,对全局区域划分子区域,从中提取压缩特征,根据正、负样本估计出各个压缩特征在正、负类中的分布;然后,使用自适应学习率结合正类更新阈值对分类器模型进行更新;最后,将跟踪分为两个阶段,每个阶段在对应的搜索区域内采集候选样本,并从全部特征中筛选出部分优质特征加权构建分类器,通过分类候选样本最终完成目标跟踪.在8个公共测试序列和4个自制序列中与最近提出的两个代表性算法进行比较,本文算法在大多数测试序列中都具有最高的跟踪成功率和最低的平均中心误差,平均处理速度可以达到3.04毫秒/帧.实验结果表明,本文算法具有更好的抵抗短时遮挡的能力,更高的准确性和鲁棒性,以及良好的实时性.
压缩跟踪,特征筛选,二次定位,分布差异,自适应更新
引用格式耿磊,王学彬,肖志涛,张芳,吴骏,李月龙,苏静静.结合特征筛选与二次定位的快速压缩跟踪算法.自动化学报,2016,42(9):1421-1431
目标跟踪在计算机视觉领域有着重要的地位和广泛的应用,如人机交互、智能安全监控、视觉导航、军事制导等,是近年来的热点研究问题.传统的目标跟踪方法中,Comaniciu等[1]提出的MeanShift算法,利用颜色直方图将目标跟踪问题转化为一个模式匹配寻优问题,但该算法对颜色变化敏感,而且无法实现运动幅度较大的目标跟踪.因此,Bradski提出CamShift算法[2],有效克服了MeanShift算法的不足,而且在目标尺寸发生变化时,能够自适应地调整跟踪区域,对目标的形状变化有一定的适应能力,在简单背景下对单目标的跟踪效果较好,但当目标与背景颜色相近时,跟踪效果会变差.Kalman滤波[3]是一种最优化自回归数据处理算法,广泛应用于线性系统中目标的预测,但如果模型是非线性的,噪声是非高斯白噪声,Kalman滤波方法将不再适用.粒子滤波[4]也是一种广为应用的跟踪算法,可以很好地应用于非线性、非高斯模型,但容易受粒子退化现象的影响.王智灵等[5]利用蛙眼视觉特性提出了一种模糊化区域理解的运动目标跟踪方法,该方法利用蛙眼视觉认知的生理特性和外部特性,设计了一种模糊化区域理解的运动目标跟踪方法,在复杂背景下取得了良好的跟踪效果,对目标外观突变的鲁棒性较好.李智勇等[6]基于蛙眼R3细胞感受野模型提出了一种运动滤波方法,利用蛙眼对目标清晰而对背景模糊的特性建立数学模型,对运动目标跟踪效果良好.刘伟峰等[7]提出了一种基于随机采样的多量测目标跟踪算法,该算法通过建立目标形状的刚体参数模型,提出采用参数马尔科夫链采样的方法估计目标的形状参数,并采用等效量测方法,获得目标形心点的运动状态.针对目标个数未知情况,在形状目标量测满足泊松分布假设条件下,采用泊松强度比方法获得目标的个数估计.该方法在目标运动状态估计方面能够获得比较高的估计精度,目标形状估计能够比较稳定精确地估计目标形状的变化,但当目标量测个数较少时,所获量测很难反映目标的形状.
基于检测的跟踪方法是目前的研究热点,这类方法将目标跟踪归结为一个二元分类问题[8],两类分别为目标类和背景类,跟踪是通过用分类器从背景中检测出目标来实现的.Yang等[9]提出了一种基于超像素的跟踪算法,该算法根据从超像素中提取的结构信息有效建模,来应对目标尺寸变化、运动、形变和遮挡等具有挑战性的问题,实验表明该算法能够抵抗严重遮挡,并在漂移后重新定位目标.但该算法使用了简单的HSI颜色特征,可以寻求更好的特征提高算法性能.Collins等[10]提出一种基于AdaBoost的在线特征选择方法,利用在线选择器选择最优的颜色特征,再用一个正采样及少量负采样来更新分类器,最后达到改善跟踪效果的目的.但该方法是一种自学习方法,分类器很容易受到噪声的影响,而且上一帧的跟踪结果会直接影响到后续处理,容易因累积误差而导致跟踪漂移.Babenko等[11]提出了多示例学习跟踪算法,该算法的训练样本以样本包的形式出现,把有歧义的所有正样本和负样本放入包中,样本的标签赋给样本包,并学习鉴别模型,可以实时地训练具有判决性的分类器,分离前景与背景.当目标被遮挡或者跟踪出现误差时,可以通过在线学习在正样本包中找到较准确的正样本来更新分类器.但是,该算法的自适应外观模型都是数据依赖的,而在学习开始时,并没有充足的数据提供给在线算法,而且如果目标发生严重遮挡,分类器更新时仍然会受到遮挡区域的影响,最终因误差积累而导致跟踪漂移.
目前,稀疏表示已经成功应用在目标跟踪领域.Zhang等[12]在粒子滤波框架下提出鲁棒的多任务稀疏学习跟踪算法,将每个粒子的学习作为一个单独的任务,对严重遮挡、剧烈的光照变化和姿态变化有很好的跟踪效果.Zhong等[13]利用全局模板和局部特征建立稀疏协同模型,能够有效地处理外观变化引起的跟踪漂移.Wang等[14]利用PCA(Principal component analysis)结合稀疏表示提出一种稀疏模型,为了削弱跟踪漂移,在模型更新时将遮挡和运动模糊因素考虑其中.
Zhang等[15]提出了一种基于压缩感知理论的实时压缩跟踪(Compressive tracking,CT)算法,该算法利用压缩感知理论提取目标特征,用在线更新的朴素贝叶斯分类器对目标和背景分类,实现了对目标的快速跟踪.但该算法存在一些缺陷.
首先,压缩特征的随机性较强,影响分类器的分类准确性.为此,石武祯等[16]根据特征的正负类条件概率分布的距离,选择能有效区分目标与背景的特征,构建出更加稳定的分类器.毛征等[17]对样本划分子区域,并从中选取置信度高的特征构建分类器,提高分类准确性.
其次,压缩特征的分布使用固定学习率进行更新,比较盲目,容易引入噪声,影响抗遮挡性能.钟权等[18]对相邻两帧之间目标的直方图进行相似性度量,根据相似度动态调整学习率,但更新参数时目标和背景采用相同的学习率,用目标的变化来调整背景的学习率,显然会影响背景模型对背景的准确表达.罗会兰等[19]做了进一步改进,采用一种非线性的双S形函数作为学习率,对目标和背景的每个特征,自适应调节其分布更新时学习速率的大小,当分类器分类错误时,可以迅速降低学习当前帧特征分布的速率,防止噪声对分类准确性的影响.这种方法虽然在目标发生较大变化时迅速降低了其分布模型的更新速率,但仍然会更新,使分布模型随遮挡时间的长短引入不同程度的噪声,影响分类结果.而且对于背景变化较大的情况,应该提高而不是降低当前帧分布模型的更新速率,使其能够时刻反映真实的背景分布.
最后,跟踪阶段用分类器检测采样区域内的所有样本,计算量较大.Zhang等[20]将跟踪分为两个阶段,每个阶段用不同的采样间隔在不同大小的采样区域内采集样本,以减少计算量.而钟权等[18]则是采集采样区域的所有样本,先随机选取1/5特征构建分类器,筛选出1/3的候选样本,再用全部特征构建分类器,通过检测筛选出的1/3候选样本得到跟踪目标.两篇文献都采用了粗精跟踪的策略,但在构建分类器时,并不是所有的压缩特征都具有较好的区分正、负样本的效果,如果将分类效果差的特征也加入分类器中,会对分类造成不良影响.
针对二元分类的单目标跟踪问题,本文提出一种结合特征筛选与二次定位的快速压缩跟踪算法(Fast compressive tracking algorithm combining feature selection with secondary localization,FSSL-CT).采用划分子区域的方法分散特征,提高抗遮挡性能.对正、负类中的特征分布,用自适应学习率更新,使更新后的分布更能反映正、负类中特征的真实分布,保证分类器分类的准确性.在更新正类中特征的分布时设定更新阈值,当两帧间的特征分布变化较大时不做更新,彻底避免噪声被引入,保证被遮挡的目标重新出现后,分类器能对其重新正确定位.在跟踪的不同阶段,采用不同的采样半径和采样间隔采集样本,从所有特征中筛选出不同数量的优质特征加权构建分类器,以有效地提高跟踪速度.
1 压缩跟踪算法
1.1基于压缩感知的多尺度特征压缩提取
压缩感知理论指出:对于稀疏信号,可以用一个满足压缩等距性(Restricted isometry property,RIP)条件的随机测量矩阵对其进行随机采样,采样后的信号几乎保留了原始信号的所有信息.而自然图像就是稀疏的.CT算法正是应用这一理论对高维的图像特征进行压缩,有效地实现了对多尺度特征的降维.降维过程如图1所示.
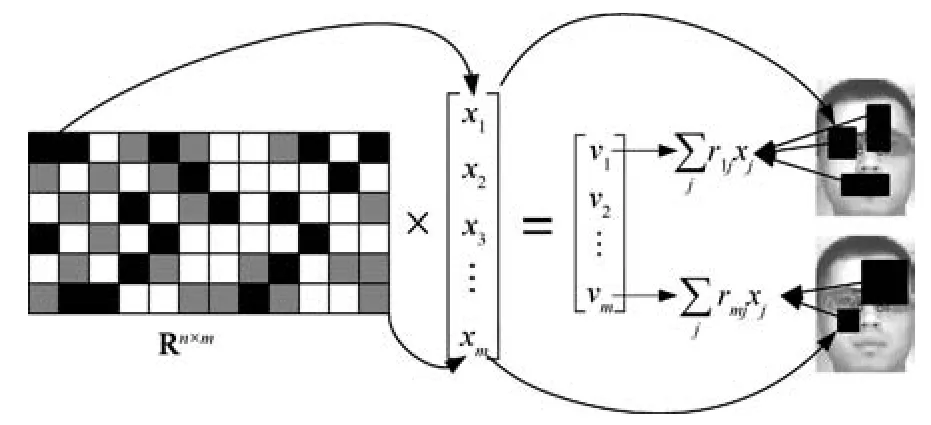
图1 降维示意图Fig.1The diagram of dimensionality reduction
对于一个样本图像Z∈Rw×h其多尺度特征可以通过与一系列不同尺度的矩形滤波器Fi,j卷积得到,Fi,j定义如下:

其中,1≤x≤w和1≤y≤h是矩形滤波器的宽度和高度.
由式(1)可知,样本图像的多尺度特征是用w×h个矩形滤波器对其滤波得到的.为了方便降维处理,将每个矩形滤波器的滤波结果都表示为一个维度为w×h的列向量,那么最后样本图像特征的高维向量就可以用列向量表示,其维度为m=(wh)2,典型值为106~1010.
满足RIP条件的典型的测量矩阵是随机高斯矩阵,但随机高斯矩阵很密集,当高维特征的维数很高时,其存储和计算量都非常大.因此,CT算法中采用一种非常稀疏的矩阵,定义如下:
上述随机测量矩阵能够通过随机数发生器获得,当s=O(m)时,此矩阵几乎能够与随机高斯矩阵同样准确,且每一行最多只有4个非零值需要计算,能在很大程度上降低所需的存储空间,提高算法速度.根据压缩感知理论,高维特征通过式(2)降到低维,即可得到压缩特征.
1.2基于朴素贝叶斯分类器的目标检测
CT算法使用简单的朴素贝叶斯分类器来建模,为此,需要假设每一个样本图像Z∈Rw×h的低维特征向量中的每个向量都是彼此独立的,且每个样本是目标和背景的概率相同,则分类器模型如下:
其中,y∈{0,1}为样本标记,y=1代表正样本,即目标,y=0代表负样本,即背景.
压缩特征的提取就是特征由高维向低维的随机映射过程,而高维随机特征的随机映射几乎总是服从高斯分布,据此,假设H(v)中的条件分布p(vi|y=1)和p(vi|y=0)都服从高斯分布,即:
跟踪阶段,根据上一帧目标的位置,在半径为γ的圆形区域内采集与目标大小相同的所有样本,提取压缩特征,并用朴素贝叶斯分类器检测各个样本,分类器响应最大的样本即认为是所要跟踪的目标.
2 特征筛选与二次定位
CT算法中假设压缩特征服从高斯分布,由于目标和背景存在一定的差异,使特征在正、负类中服从不同的高斯分布.朴素贝叶斯分类器正是利用这种差异来分类的,因此,特征在正、负类中分布差异的大小直接决定了该特征分类能力的强弱.显然,差异越大,分类能力越强;差异越小,分类能力越弱.
本文采用Bhattacharyya系数[21](以下简称巴氏系数)来度量正负类之间特征分布的差异.对于连续分布,其表达式为

其中,B∈[0,1],表示两个分布之间的重叠度,值越大,表示两个分布重叠越大,差异越小,对应特征的分类能力也就越弱,当B=1时,两个分布完全重合;反之,B值越小,表示两个分布重叠越小,差异越大,对应特征的分类能力则越强.B与分布之间的关系如图2所示,随着压缩特征v1、v2、v3在正、负类中的分布差异逐渐增大,B值越来越小.
2.1划分子区域
在CT算法中,每个特征都是在全局区域内提取的,当目标被遮挡时,即使是较小区域的遮挡,也可能会有大量的特征受到影响,随之引入的跟踪误差经过不断积累,会影响后续跟踪的准确性.为此,本文采取一种基于子区域的特征提取方法.该方法将全局区域划分为5个子区域,在每个子区域内提取压缩特征,保证在目标出现较小区域遮挡的情况下,只有被遮挡子区域内的部分特征受到影响,避免因为大量特征受到影响而发生跟踪漂移.划分子区域的模板如图3所示.

图2 B与分布的关系Fig.2Relationship between B and distribution
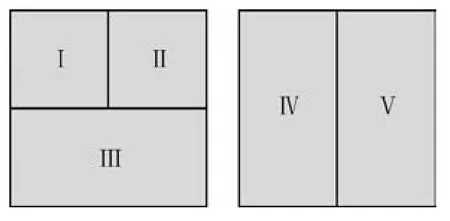
图3 子区域模板Fig.3Sub-region template
2.2自适应学习率与更新阈值
由式(3)可以看出,朴素贝叶斯分类器由若干个分量相加组成,而每个分量都是一个特征在正、负类中分布的概率密度的比值取对数,因此,可以把每个分量看做是一个弱分类器,那么每个弱分类器都对应一个特征.所以朴素贝叶斯分类器的更新就是各个弱分类器的更新,而弱分类器的更新对应特征在正、负类中分布的更新.
CT算法中,分类器参数更新存在两点不足:1)采用固定学习率更新正、负类中每个特征的分布.同一特征每次在相邻两帧之间分布的变化是不同的,在相同的两帧之间,各个特征的分布变化也是不同的,采用固定学习率很难保证更新后的特征分布能够有效反映其真实分布,当二者不匹配时,分类器的性能就会下降;2)对正类的所有特征分布都更新.目标跟踪过程中经常会遇到遮挡的情况,虽然已经划分了子区域,但当目标被遮挡的区域很大时,仍然会使绝大多数的特征受到影响,此时若继续更新这些特征的分布,就会使分类器将遮挡物体误认为是目标,当遮挡物体与目标分离时,跟踪窗口也会随之偏离真实的目标.
本文提出一种基于自适应学习率和正类更新阈值的策略,将相邻两帧之间特征的B值作为更新其分布的学习率,直接更新负类.考虑到遮挡因素的影响,对正类设定一个更新阈值T,只有当B>T时,才更新正类的特征分布,否则保持原有分布不变.特征分布的更新公式如下:
2.3基于加权特征筛选的分类器构建
在构建分类器方面,CT算法存在两点不足:1)始终用全部压缩特征来构建分类器,而某些特征对分类的贡献很小,这样就增加分类器的计算量;2)构建分类器的所有特征的权值都为1,由于不同特征的分类能力不同,所以采用相同权重无法突出具有较强区分力的特征的重要性.
本文在构建分类器时,利用巴氏系数度量正、负类特征分布间的相似性,相似性越小的特征分类效果越好.根据跟踪阶段的需要,从所有特征中筛选出部分优质特征,根据相应的巴氏系数加权构建分类器,使构建出的分类器可以依据权值对各个弱分类器反馈的分类信息区分对待,有效提升自身的分类能力.分类器模型如下:

2.4基于二次定位的跟踪策略
在跟踪阶段,原CT算法在以上一帧目标为中心的圆形区域内,通过滑动窗口采集该区域与目标大小相同的所有样本,再用分类器对这些样本逐一检测,得到跟踪目标.这种方法需要检测的样本数量较多,会消耗大量的时间.特别是当目标快速移动时,如果搜索半径设置的过小,会发生跟踪漂移,如果设置的过大,则会消耗更多的时间.
本文提出一种基于二次定位的跟踪策略,如图4所示,该策略分为两个过程:首先根据上一帧得到的目标gt的位置,在半径为γ1的圆形区域内用大于1的采样间隔Δ1等间隔采样,得到样本集A1,选取2/5分类能力强的特征构建分类器检测A1,找出最有可能是目标的样本S;再根据S的位置,采集半径为γ2(γ2<γ1)的圆形区域内的所有样本,得到样本集A2,选取分类能力较好的4/5特征构建分类器检测A2,得到最终的跟踪目标gt+1,完成跟踪.
2.5算法流程
输入.正样本采样半径γp,负样本采样半径γN-I、γN-O,跟踪搜索半径γ1、γ2,视频第t帧图像,第t-1帧图像中的目标位置It-1.
输出.第t帧图像中目标的位置It.
1)采集样本集A1={s|‖I(s)-It-1‖<γ1},提取压缩特征F;
2)筛选出2/5优质特征,根据式(13)构建分类器H1,检测出A1中使H1响应值最大的样本s1;
3)采集样本集A2={s|‖I(s)-Is1‖<γ2},提取压缩特征F;
4)筛选出2/5优质特征,根据式(13)构建分类器H2,检测出A2中使H2响应值最大的样本s2,It=s2;


图4 二次定位示意图Fig.4The diagram of secondary localization
5)采集正样本集AP={s|‖It-Is‖<γP}和负样本集AN={s|γN-I<‖It-Is‖<γN-O},提取压缩特征F,计算特征在正、负类中的分布PP和PN;
6)根据式(8)~(12)更新PPi和PNi.
3 实验结果及分析
为了验证本文算法的性能,选取8个公共测试序列[22]和4个自制的红外测试序列进行结果验证,这些序列包含光照变化、遮挡和姿态变化等具有挑战性的因素.本文算法主要应用于驾驶员的脸部跟踪,因此,根据驾驶员疲劳检测项目的需要,加入了红外视频的测试序列.在所有测试序列中,将本文算法与CT和FCT(Fast compressive tracking)算法进行比较.实验环境为Intel Core i3双核处理器,2.53GHz主频,3GB内存,Windows 7操作系统,开发平台为VS2010+opencv2.4.9.由于CT[15]和FCT[20]在文献中给出的参数和在源程序中给出的配置参数不完全相同,所以选取其中效果较好的参数.各算法在每个测试序列上都运行10次,最后取平均值.
3.1准确性比较
成功率是评价算法准确性的重要标准之一.在判断每一帧是否跟踪成功时,本文采用文献[23]中使用的判定准则,其定义如下:

其中,T为跟踪结果区域,G为目标的实际区域,S为准则的判定值.若S>0.5,则认为跟踪成功;否则,认为跟踪失败,并根据跟踪成功的帧数与总帧数的比值得到跟踪的成功率.各个算法在不同测试视频中的跟踪成功率如表1所示,每种视频序列中最高的成功率用粗体标注.从表1中可以看出,FSSLCT算法在大多数的测试序列中跟踪成功率都是最高的.
中心位置误差是评价跟踪算法准确性的另外一个准则.它表示跟踪算法得到的目标中心和目标实际中心位置之间的像素的距离,本文采用欧氏距离.各测试序列中算法的平均中心误差如表2所示,最小平均中心误差已用粗体标注.
为了进一步体现各个算法的性能,本文给出了部分测试序列的精确度曲线[22],如图5所示,它表示跟踪目标与真实目标中心间的欧氏距离在某一阈值范围内的帧数的百分比,反映了算法在不同阈值下的性能.如在图5(a)中,当阈值小于12时,CT算法的性能优于FSSL-CT算法,而当阈值大于12时,FSSL-CT算法的性能更优,在图5(b)~(e)中,FSSL-CT算法几乎在每个阈值下的性能都优于其他两种算法.
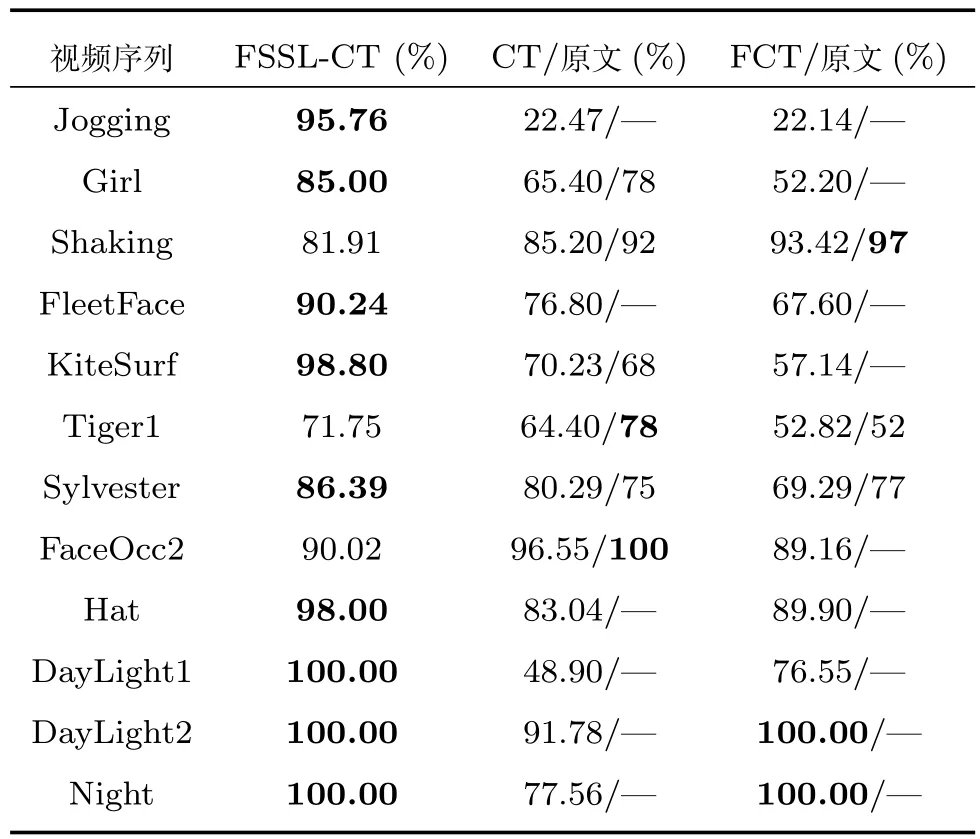
表1 各算法跟踪成功率比较Table 1Comparison of the tracking success rate of different algorithms

表2 各算法平均中心误差比较(像素)Table 2Comparison of mean center error of different algorithms(pixel)
各个算法的跟踪效果如图6~图10所示,CT、FCT和FSSL-CT算法分别用不同线型的矩形框表示,并已在图中下方注释.
如图6第697、1184、1236帧,图8第64、315帧以及图10第114、197、543帧,在目标受到光照变化、快速运动等因素的影响时,FSSL-CT算法因为采用自适应学习率,可以根据模型在相邻两帧之间的变化来调节模型的更新速度;而CT算法和FCT算法使用固定学习率,致使模型无论变化快慢,都以恒定的速度进行更新,更新较为盲目,影响了算法性能.从图中可以看出,FSSL-CT算法取得了较好的跟踪效果,具有一定的跟踪稳定性.
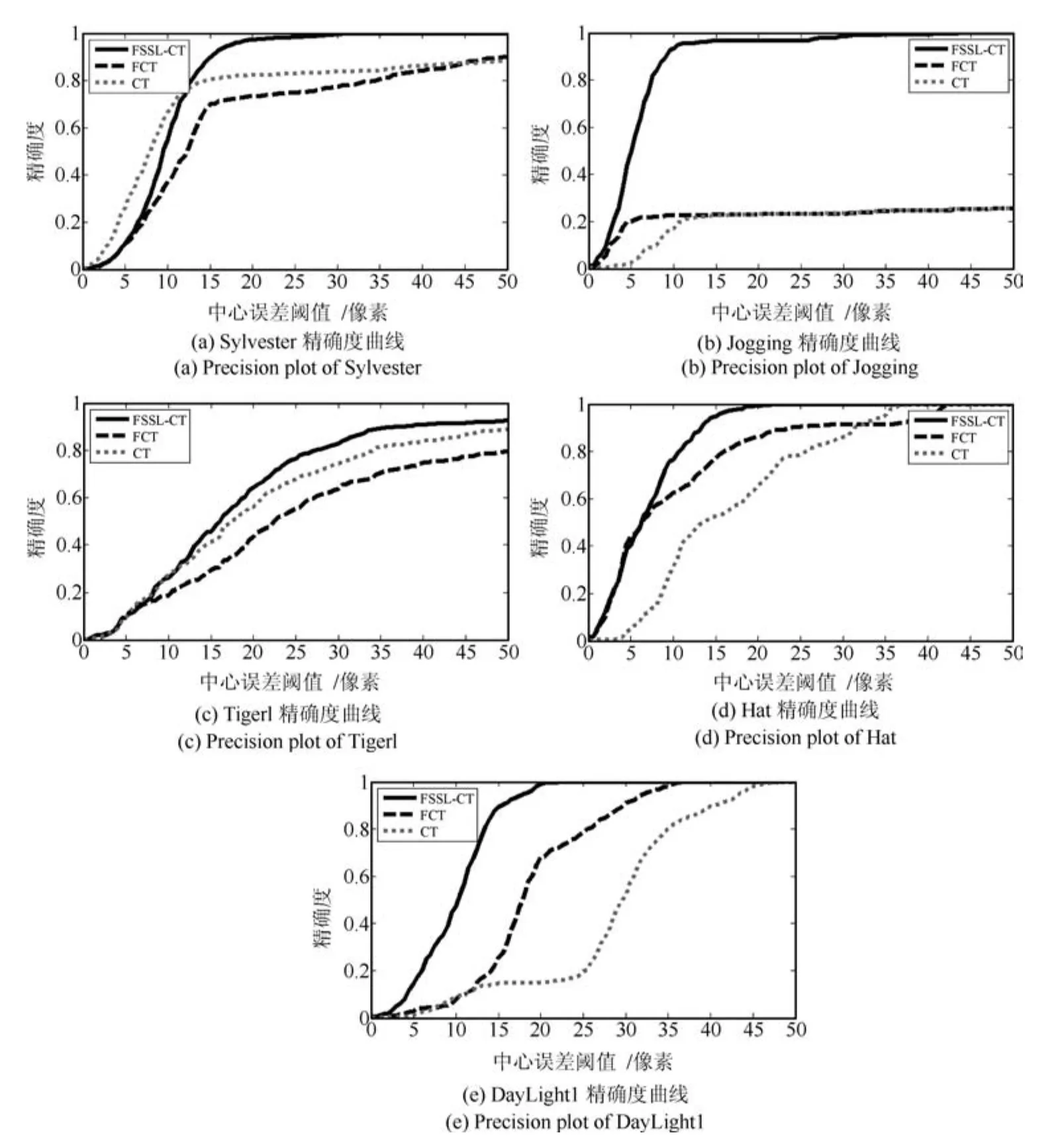
图5 精确度曲线Fig.5Precision plot

图6 Sylvester(第4、697、1184、1236帧)Fig.6Sylvester(Frames 4、697、1184、1236)
在FSSL-CT算法中,子区域的划分和正类中特征分布更新阈值的设定,在很大程度上增强了算法抗遮挡的性能.如图7第53帧和第79帧,由于跑步者被完全遮挡后仍然保持移动,导致三种算法在严重干扰下暂时未能跟踪到目标;此时,FSSL-CT通过正类阈值限制了目标模型的更新,而CT和FCT算法始终在对目标模型进行更新,所以当目标重新出现后,FSSL-CT能重新定位目标,而其他两种算法由于目标模型的误差积累而导致跟踪失败.如图8第115帧和图9第515帧,同样是目标受到遮挡的影响,相比其他两种算法,FSSL-CT仍然能够较好地跟踪目标.

图7 Jogging(第53、78、79、231帧)Fig.7Jogging(Frames 53、78、79、231)

图8 Tiger1(第7、64、115、315帧)Fig.8Tiger1(Frames 7、64、115、315)
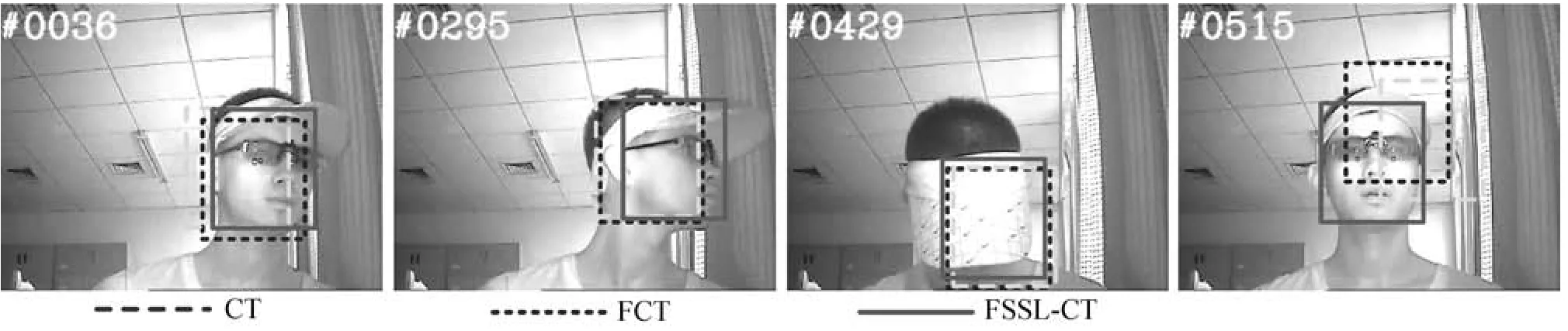
图9 Hat(第36、295、429、515帧)Fig.9Hat(Frames 36、295、429、515)
图10 DayLight1(第71、114、197、543帧)Fig.10DayLight1(Frames 71、114、197、543)
3.2算法速度比较

FSSL-CT与CT和FCT在算法复杂度上的差别主要体现在跟踪阶段对候选样本的检测部分,该部分的计算次数:其中,m1和n1是第一次定位时的候选样本数和特征数,m2和n2是第二次定位时的候选样本数和特征数,NF是分类其中每个特征对应部分所需要的计算次数.三种算法的计算次数如表3所示.
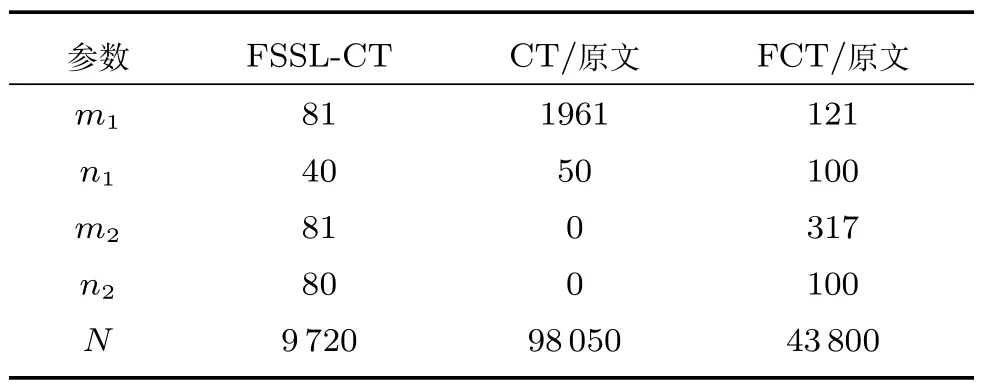
表3 各算法计算次数及相关参数(次)Table 3Calculation times and related parameters of different algorithms(times)
为了直观地比较各个算法的运行速度,对每个视频序列测试10次,得出每一帧的平均处理时间,实验结果如表4所示,FSSL-CT算法对12个测试视频序列的的平均处理时间能够达到3.04毫秒/帧.
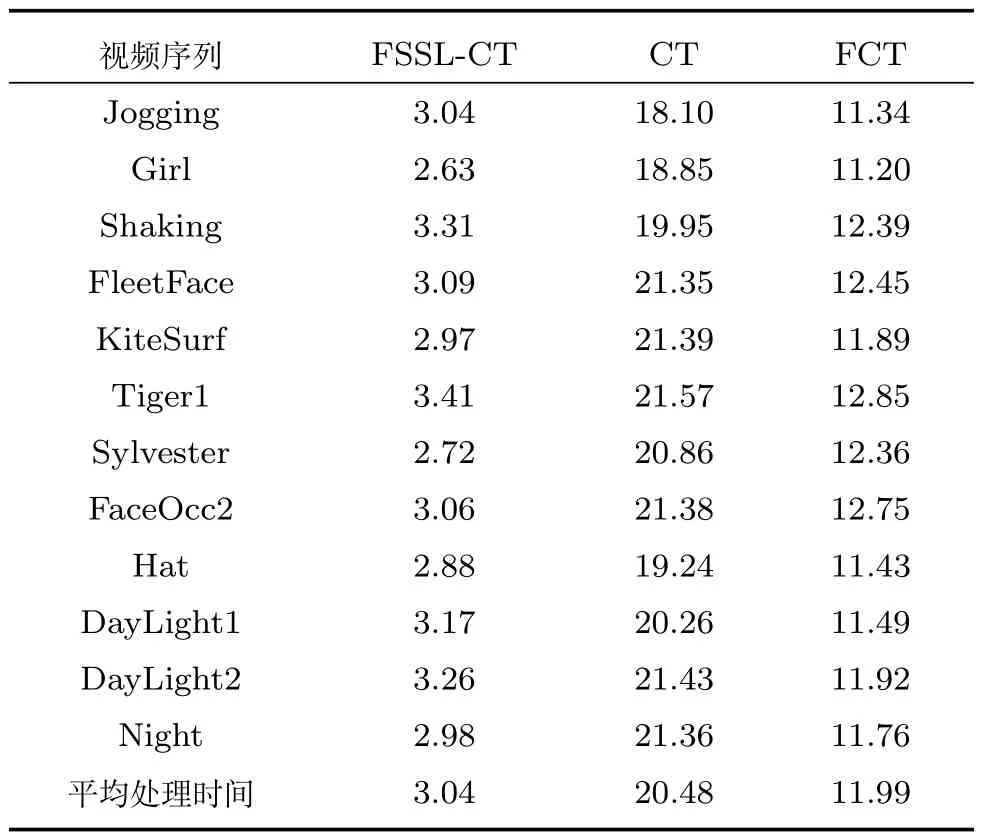
表4 各算法运行速度比较(毫秒/帧)Table 4Comparison of operation speed of different algorithms(ms/frame)
4 总结
本文提出一种基于特征筛选与二次定位的快速压缩跟踪算法(FSSL-CT).针对短时遮挡问题,对每个样本划分子区域,从各个子区域中提取压缩特征,根据正、负样本集估计出特征在正、负类中的分布,用相邻两帧之间特征分布的差异作为学习率,更新特征分布,并对正类设定更新阈值,满足阈值要求时才更新相应的特征分布.针对跟踪阶段需要检测的样本较多的问题,采用一种基于二次定位的跟踪策略.首次定位采集样本的圆形区域半径较大,用大于1的间隔在此区域内等间隔采样,并用分类器得到其中的最优目标.再以此目标为中心采集较小半径的圆形范围内的所有样本,进行二次定位,用分类器得到最终的跟踪目标.实验结果表明,FSSL-CT算法的准确性、稳定性和抗遮挡能力更好,平均处理速度为3.04毫秒/帧,能够实现实时跟踪.与原始CT算法一样,由于跟踪窗口的尺度依赖于初始化目标,跟踪时无法根据目标的变化而自适应调整窗口,使得FSSL-CT算法对于尺度发生较大变化的目标跟踪效果欠佳,这将是本文后续研究的重点.
References
1 Comaniciu D,Ramesh V,Meer P.Kernel-based object tracking.IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(5):564-577
2 Bradski G R.Real time face and object tracking as a component of a perceptual user interface.In:Proceedings of the 4th IEEE Workshop on Applications of Computer Vision. Princeton,USA:IEEE,1998.214-219
3 Huang S L,Hong J X.Moving object tracking system based on camshift and Kalman filter.In:Proceedings of the 2011 International Conference on Consumer Electronics,Communications and Networks.Xianning,China:IEEE,2011. 1423-1426
4 Vadakkepat P,Liu J.Improved particle filter in sensor fusion for tracking randomly moving object.IEEE Transactions on Instrumentation and Measurement,2006,55(5):1823-1832
5 Wang Zhi-Ling,Chen Zong-Hai,Xu Xiao-Xiao,Wu Liang.A fuzzy region understanding tactic for object tracking based on frog's vision characteristic.Acta Automatica Sinica,2009,35(8):1048-1054(王智灵,陈宗海,徐萧萧,吴亮.基于蛙眼视觉特性的运动目标模糊化区域理解跟踪方法.自动化学报,2009,35(8):1048-1054)
6 Li Zhi-Yong,He Shuang,Liu Jun-Min,Li Ren-Fa.Motion filtering by modelling R3 cell's receptive field in frog eyes. Acta Automatica Sinica,2015,41(5):981-990(李智勇,何霜,刘俊敏,李仁发.基于蛙眼R3细胞感受野模型的运动滤波方法.自动化学报,2015,41(5):981-990)
7 LiuWei-Feng,ChaiZhong,WenCheng-Lin.Multimeasurement target tracking by using random sampling approach.Acta Automatica Sinica,2013,39(2):168-178(刘伟峰,柴中,文成林.基于随机采样的多量测目标跟踪算法.自动化学报,2013,39(2):168-178)
8 Avidan S.Support vector tracking.IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(8):1064-1072
9 Yang F,Lu H C,Yang M H.Robust superpixel tracking.IEEE Transactions on Image Processing,2014,23(4):1639-1651
10 Collins R T,Liu Y X,Leordeanu M.Online selection of discriminative tracking features.IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(10):1631-1643
11 Babenko B,Yang M H,Belongie S.Robust object tracking with online multiple instance learning.IEEE Transactions on Pattern Analysis and Machine Intelligence,2011,33(8):1619-1632
12 Zhang T Z,Ghanem B,Liu S,Ahuja N.Robust visual tracking via multi-task sparse learning.In:Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition.Providence,USA:IEEE,2012.2042-2049
13 Zhong W,Lu H C,Yang M H.Robust object tracking via sparse collaborative appearance model.IEEE Transactions on Image Processing,2014,23(5):2356-2368
14 Wang D,Lu H C,Yang M H.Online object tracking with sparse prototypes.IEEE Transactions on Image Processing,2013,22(1):314-325
15 Zhang K H,Zhang L,Yang M H.Real-time compressive tracking.In:Proceedings of the 2012 European Conference on Computer Vision.Florence,Italy:Springer Berlin Heidelberg,2012.864-877
16 Shi Wu-Zhen,Ning Ji-Feng,Yan Yong-Feng.Feature selection and target model updating in compressive tracking. Journal of Image and Graphics,2014,19(6):932-939(石武祯,宁纪锋,颜永丰.压缩感知跟踪中的特征选择与目标模型更新.中国图象图形学报,2014,19(6):932-939)
17 Mao Zheng,Yuan Jian-Jian,Wu Zhen-Rong,Qu Jin-Song,Li Hong-Yan.Real-time compressive tracking based on online feature selection.Optics and Precision Engineering,2014,22(3):730-736(毛征,袁建建,吴珍荣,曲劲松,李红岩.基于在线特征选择的实时压缩跟踪.光学精密工程,2014,22(3):730-736)
18 Zhong Quan,Zhou Jin,Wu Qin-Zhang,Wang Hui,Lei Tao.An improved real-time compressive tracking.Opto-Electronic Engineering,2014,41(4):1-8(钟权,周进,吴钦章,王辉,雷涛.一种改进的实时压缩跟踪算法.光电工程,2014,41(4):1-8)
19 Luo Hui-Lan,Zhong Bao-Kang,Kong Fan-Sheng.Object tracking algorithm by combining the predicted target position with compressive tracking.Journal of Image and Graphics,2014,19(6):875-885(罗会兰,钟宝康,孔繁胜.结合目标预测位置的压缩跟踪.中国图象图形学报,2014,19(6):875-885)
20 Zhang K H,Zhang L,Yang M H.Fast compressive tracking.IEEE Transactions on Pattern Analysis and Machine Intelligence,2014,36(10):2002-2015
21 Comaniciu D,Ramesh V,Meer P.Real-time tracking of nonrigid objects using mean shift.In:Proceedings of the 2000 IEEE Conference on Computer Vision and Pattern Recognition.Hilton Head Island,USA:IEEE,2000,2:142-149
22 Wu Y,Lim J,Yang M H.Online object tracking:a benchmark.In:Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition.Portland,USA:IEEE,2013.2411-2418
23 Everingham M,Van Gool L,Williams C L I,Winn J,Zisserman A.The pascal visual object classes(VOC)challenge. International Journal of Computer Vision,2010,88(2):303-338

耿磊天津工业大学电子与信息工程学院副教授.2012年获得天津大学精密仪器与光电子工程学院博士学位.主要研究方向为图像处理与模式识别,智能信号处理技术与系统,DSP系统研发.
E-mail:genglei@tjpu.edu.cn
(GENG LeiAssociate professor at the School of Electronics and Information Engineering,Tianjin Polytechnic University.He received his Ph.D.degree from the School of Precision Instrument and Opto-Electronics Engineering,Tianjin University in 2012.His research interest covers image processing and pattern recognition,intelligent signal processing technology and system,DSP system research and development.)

王学彬天津工业大学电子信息与工程学院硕士研究生.2013年获得天津工业大学电子信息工程专业学士学位.主要研究方向为模式识别,机器学习.
E-mail:wangxuebin2014@sina.com
(WANG Xue-BinMaster student at the School of Electronics and Information Engineering,Tianjin Polytechnic University.He received his bachelor degree from the School of Electronics and Information Engineering,Tianjin Polytechnic University in 2013.His research interest covers pattern recognition and machine learning.)

肖志涛天津工业大学电子与信息工程学院教授.2003年获得天津大学电子信息工程学院博士学位.主要研究方向为智能信号处理,图像处理与模式识别.本文通信作者.
E-mail:xiaozhitao@tjpu.edu.cn
(XIAO Zhi-TaoProfessor at the School of Electronics and Information Engineering,Tianjin Polytechnic University.He received his Ph.D.degree from the School of Electronics and Information Engineering,Tianjin University in 2003.His research interest covers intelligent signal processing,imageprocessing and pattern recognition.Corresponding author of this paper.)

张芳天津工业大学电子与信息工程学院副教授.2009年获得天津大学精密仪器与光电子工程学院博士学位.主要研究方向为图像处理与模式识别,光学干涉测量技术.
E-mail:hhzhangfang@126.com
(ZHANG FangAssociate professor at the School of Electronics and Information Engineering,Tianjin Polytechnic University.She received her Ph.D.degree from the School of Precision Instrument and Opto-Electronics Engineering,Tianjin University in 2009.Her research interest covers image processing and pattern recognition,and optical interference measurement technique.)
吴骏天津工业大学电子与信息工程学院副教授.2007年获得天津大学电子信息工程学院博士学位.主要研究方向为图像处理与模式识别,人工神经网络.
E-mail:zhenkongwujun@163.com
(WU JunAssociate professor at the School of Electronics and Information Engineering,Tianjin Polytechnic University.He received his Ph.D.degree from the School of Electronics and Information Engineering,Tianjin University in 2007.His research interest covers image processing and pattern recognition,and artificial neural network.)

李月龙天津工业大学计算机科学与软件学院副教授.2012年获得北京大学信息科学技术学院计算机专业博士学位,2015年英国约克大学公派访问学者.主要研究方向为计算机视觉,模式识别,轮廓提取,人脸识别.
E-mail:liyuelong@pku.edu.cn
(LI Yue-LongAssociate professor at the School of Computer Science and Software Engineering,Tianjin Polytechnic University.He received his Ph.D. degree in computer science from the School of Electronics Engineering and Computer Science,Peking University in 2012.He was an academic visitor in the University of York in 2015.His research interest covers computer vision,pattern recognition,shape extraction,and face recognition.)

苏静静天津工业大学硕士研究生. 2014年获得北华航天工业学院电子与信息工程专业学士学位.主要研究方向为模式识别,机器学习.
E-mail:1065250074@qq.com
(SU Jing-JingMaster student at the School of Electronics and Information Engineering,Tianjin Polytechnic University.She received her bachelor degree from North China Institute of Aerospace Engineering in 2014.Her research interest covers pattern recognition,and machine learning.)
Manuscript October 8,2015;accepted January 23,2016
Fast Compressive Tracking Algorithm Combining Feature Selection with Secondary Localization
GENG Lei1,2WANG Xue-Bin1XIAO Zhi-Tao1,2ZHANG Fang1,2WU Jun1,2LI Yue-Long2SU Jing-Jing1
As the traditional compressive tracking algorithm fails to track targets stably under occlusive condition and update model accurately,a fast tracking algorithm combining feature selection with secondary localization based on compressive tracking(FSSL-CT)is proposed.Firstly,compressive features are extracted from sub-regions partitioned from the global region,and the distributions of each compressive feature in positive and negative classes are estimated.Secondly,the classifier model is updated utilizing the method of adaptive learning rate and positive class update threshold.Finally,the tracking stage is divided into two procedures.In each procedure,some candidate samples are collected in the given searching region,and partial high quality features are selected from all the features and weighted to construct a classifier,then,the candidate samples are classified by the classifier.After that,the target tracking is achieved.Compared with two state-of-the-art algorithms on 8 public testing sequences and 4 private sequences,the FSSL-CT algorithm is proved to have the highest tracking success ratio and the lowest average central error in most of the sequences,and the average processing speed could achieve 3.04 milliseconds per frame.It is tested that the proposed FSSL-CT algorithm has a better capacity of resisting short-time occlusion and running in real-time,higher accuracy and robustness than the two state-of-the-art algorithms.
Compressive tracking,feature select,secondary localization,distribution difference,adaptive update
10.16383/j.aas.2016.c150603
2015-10-08录用日期2016-01-23
国家自然科学基金(61302127),高等学校博士学科点专项科研基金(20131201110001),天津市科技支撑计划重点项目(14ZCZDGX00033)资助
Supported by National Natural Science Foundation of China(61302127),Specialized Research Fund for the Poctoral Program of Higher Education of China(20131201110001),Key Projects of Tianjin Science and Technology Support Program(14ZCZDGX00033)
本文责任编委胡清华
Recommended by Associate Editor HU Qing-Hua
1.天津工业大学电子与信息工程学院天津3003872.天津市光电检测技术与系统重点实验室天津300387
1.School of Electronics and Information Engineering,Tianjin Polytechnic University,Tianjin 3003872.Tianjin Key Laboratory of Optoelectronic Detection Technology and Systems,Tianjin 300387
Geng Lei,Wang Xue-Bin,Xiao Zhi-Tao Zhang Fang,Wu Jun,Li Yue-Long,Su Jing-Jing.Fast compressive tracking algorithm combining feature selection with secondary localization.Acta Automatica Sinica,2016,42(9):1421-1431
