一种改进的PNLMS自适应滤波算法
2016-11-03郭继昌邱琳耀
郭继昌,张 雪,邱琳耀
(天津大学电子信息工程学院,天津 300072)
一种改进的PNLMS自适应滤波算法
郭继昌,张 雪,邱琳耀
(天津大学电子信息工程学院,天津 300072)
比例归一化最小均方算法PNLMS(proportionate NLMS)引入步长控制矩阵,为滤波器不同的系数赋予不同的Proportionate步长,从而加快了算法的初始收敛速度,但其后期收敛速度下降,甚至比NLMS收敛速度还慢.针对此问题提出一种改进的PNLMS算法,通过定量分析滤波器系数的收敛过程,在迭代过程中建立了Proportionate步长与滤波器当前系数幅值之间的非线性函数关系——倒数关系,较大幅度地降低了算法的复杂度.仿真结果表明,该算法的收敛速度和稳定性优于PNLMS算法及其改进算法MPNLMS,并且算法的计算复杂度远低于MPNLMS算法.
自适应滤波;回声消除;PNLMS算法
近年来,随着互联网和移动通信的快速发展,回声消除技术面临着新的挑战.传统的最小均方(least mean squares,LMS)算法和归一化最小均方(normalized LMS,NLMS)算法等自适应滤波算法因其结构简单、算法复杂度低,广泛用于噪声消除和回声消除中[1-3],但因网络回声的路径长度比传统电话网络的回声路径大,使得LMS算法和NLMS算法收敛速度慢,达不到实时处理的需求.基于sigmoid函数的LMS算法及其改进算法收敛速度快[4-5],但跟踪能力较差,易受输入噪声影响,在低信噪比环境下该算法的收敛速度和稳定性并不十分理想.选择性部分更新最小均方(selective partial update LMS,SPU LMS)算法及其改进算法是在每次迭代中进行部分滤波器系数的更新,该类算法收敛速度快,但算法的复杂度较高[6-7].
根据网络回声路径的稀疏性,Duttweiler[8]引入了适当自适应的思想,在归一化LMS的基础上形成了比例归一化最小均方(proportionate NLMS,PNLMS)算法.在该算法中各个滤波器系数的Proportionate步长(P步长)与当时的滤波器系数幅值成正比,有助于使大抽头系数比小抽头系数获得更快的调整,从而加快了算法的初始收敛速度.但是当大抽头系数快速收敛后,剩下的小抽头系数收敛速度下降,甚至比NLMS算法收敛速度还慢.因此很多学者针对PNLMS算法后期收敛速度较慢的缺点进行了研究和改进.
文献[9]提出的PNLMS++算法在抽头系数更新的过程中交替使用NLMS和PNLMS两种算法,来弥补PNLMS后期收敛速度慢的缺点,但未能从根本上解决收敛速度问题.文献[10]提出的复合型比例归一化最小均方(composite PNLMS,CPNLMS)算法通过设定阈值,比较误差信号功率和阈值大小,来判断算法是否从PNLMS切换至NLMS,但是阈值的选取具有较大的随意性,因此该算法不具有通用性.文献[11]提出的IPNLMS算法将滤波器当前抽头系数的均值加到比例步长参数上,保证每个抽头系数的比例步长参数具有合理的值,增加了全局步长的迭代,但增大了算法的复杂度.文献[12]提出的MPNLMS(µ-law PNLMS)算法通过定量分析滤波器系数的收敛过程,平衡了滤波器大、小系数之间的更新,得到了最优的步长控制矩阵,克服了PNLMS后期收敛速度慢的缺陷,但是MPNLMS算法含有对数运算,算法复杂度很高.为降低算法复杂度,文献[13]提出了SPNLMS算法,将对数运算简化为两段折线.此外,文献[14]提出一种改进的MPNLMS算法,采用多个分段函数来近似MPNLMS的对数函数,从而降低算法的复杂度.文献[15]对SPNLMS算法进行了改进,设滤波器长度为L,运算过程中每L次迭代计算1次步长控制矩阵,从而降低算法复杂度.这些对MPNLMS算法的改进在降低算法复杂度的同时,收敛速度和稳定性均有不同程度的下降.
本文针对MPNLMS算法复杂度过高的问题进行了改进.通过定量分析滤波器系数的收敛过程,得到算法收敛所需的最小迭代次数,根据最小迭代次数进一步推导出P步长与滤波器系数之间的倒数关系,然后将P步长用于步长控制矩阵的更新过程,为各个滤波器系数赋予不同的步长.本文算法计算复杂度远小于MPNLMS,而收敛速度优于MPNLMS算法.
1 PNLMS算法
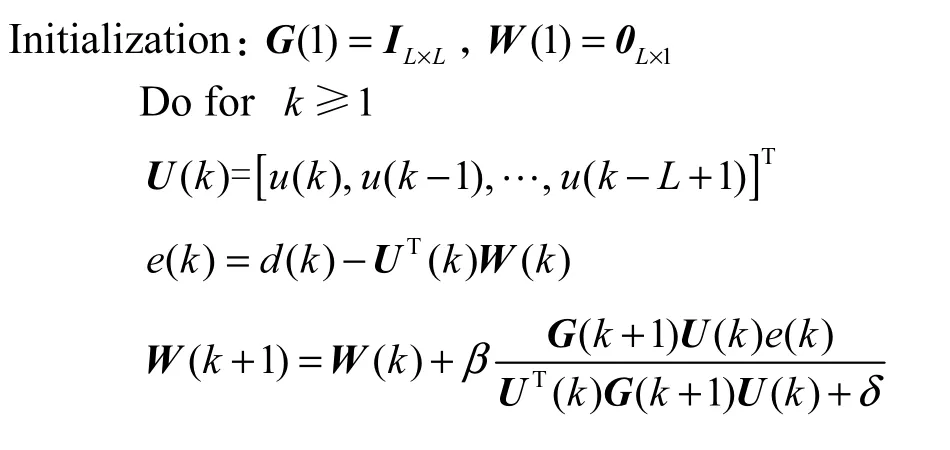
PNLMS算法的系数更新方程可写为


式中:d(k)为期望响应;e(k)为误差信号;U(k)为输入信号;Wˆ(k)为抽头系数;β为全局控制参数,控制算法的稳态失调和收敛速度;δ为调整参数,防止分母为零的情况出现.
算法引入了步长控制矩阵G(k+1),为各个滤波器系数赋予不同的步长.G(k+1)可表示为

G(k+1)按如下递归关系进行计算:
式中:δp为修正系数,防止权系数全为零时gl(k+1)不成立;ρ一般取在1/L~5/L之间;L为滤波器长度;γmin为防止抽头权值远小于滤波器最大抽头权值时发生迭代停顿而设置.

MPNLMS算法比其他的系数比例自适应算法的收敛速度快,而且当目标冲激响应的稀疏度不是很大时,收敛速度也不会恶化很多.但是MPNLMS包含了L次的对数运算,不管是在DSP平台还是在PC平台,对数运算的计算量都很大.因此,很多学者提出了改进算法,比较典型的是SPNLMS算法,在此算法中将对数函数关系近似为折线形式,表达式如下:

SPNLMS算法虽然极大地降低了算法复杂度,但收敛速度也相应下降.
2 一种新的改进型PNLMS算法
由于PNLMS算法过分强调大系数的收敛,忽略了小系数因P步长过小无法及时收敛,导致算法后期收敛速度慢,因此P步长的引入必须均衡大、小系数的更新,使小系数也能及时收敛.MPNLMS算法的P步长计算函数建立了P步长与当前滤波器系数幅值的对数关系,改善了PNLMS算法后期收敛速度慢的缺陷,但是对数运算的复杂度很高,不利于系统的实时处理.为此,本文在定量分析滤波器的收敛过程后建立一种新的P步长与当前滤波器系数幅值的函数关系,以均衡大、小系数的收敛,且尽量降低算法的复杂度.
2.1改进的PNLMS算法推导
由文献[16]可知系数比例自适应算法的标准形式为

式中:β=1Lσx2;R为输入信号的自相关矩阵,R=E[U(k)UT(k )].
2.1.1改进的PNLMS算法收敛所需的最小迭代次数

引入独立性假设,假设输入为高斯白噪声信号,则有R=σX2I,记则式(11)化简为由此可得自适应滤波器各系数收敛公式为


通过设定小步长μ可保证0<λgl(k )≪1,式(13)可化简为



式(16)即为本文算法整体收敛所需要的最少迭代次数.
2.1.2P步长计算公式
根据式(16),当所有滤波器系数收敛于目标值时可以取得最快的收敛速度,此时kmin=k1=k2=…=kL.引入G(k)时不变假设,由式(13)可得

因0<λgl(k )≪1,本文忽略λgl的平方及高次幂的多项式的影响,将近似为结合式(16)可得P步长计算公式,即
ε是与算法收敛标准相关的参数,根据文献[17]建议取值为0.001,当时,可判断滤波器系数已收敛于目标值,因此,的计算公式为

式(19)就是本文推导出的P步长计算函数公式,由此得到了改进的PNLMS算法.由式(19)可以看出,在改进PNLMS算法中,用P步长与当前滤波器系数幅值的倒数关系代替MPNLMS中的对数关系.后面的实验将证明,这样一个关系的改变,既保证了小系数在大系数快速收敛后能得到较快的收敛,提高了算法的整体收敛速度,同时也降低了算法的复杂度.
2.2改进算法的实现
本文算法以NLMS算法为基础,通过引入P步长加快算法的收敛速度,实现的步骤如下.
3 仿真结果及算法复杂度分析
为检验算法的性能,下面通过仿真来比较NLMS、PNLMS、MPNLMS、SPNLMS算法和本文所提算法的收敛速度和稳态失调.仿真条件为:输入信号是均值为零、方差为1的高斯白噪声;干扰信号为与输入信号不相关的高斯白噪声.参数采用文献[12]中的典型值:步长参数β=0.3,ρ=0.01,δ=0.01,参数ε设为0.001.
3.1算法的收敛速度和稳定失调性能分析
3.1.1实验1
选取与输入信号无关的高斯白噪声作为干扰信号,在信噪比分别为20,dB、30,dB和40,dB,滤波器长度分别为512、512和128的条件下进行收敛速度和稳定失调的对比实验,结果如图1所示.
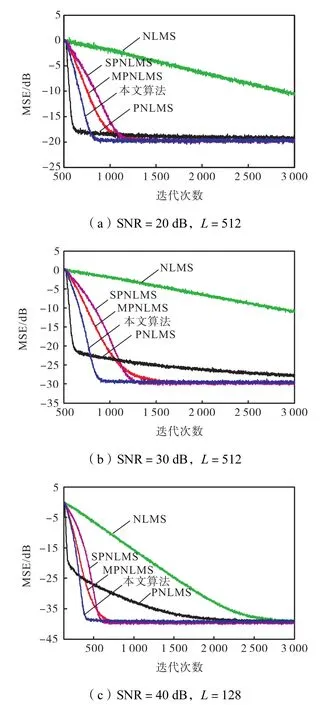
图1 各种算法的收敛速度和稳定失调性能对比Fig.1Comparison of algorithms' convergence speed and steady performance
由图1可以看出:在全局步长参数相同的条件下,PNLMS算法初始收敛速度较快,但后期较NLMS算法还慢,MPNLMS和SPNLMS算法的后期收敛速度有很大的提高,使整个收敛过程速度都达到很高的水平.从实验中误差的大小可以看出,几种算法中当自适应滤波器收敛时抽头系数距离最优值的远近即稳态失调也基本相同.而本文所提算法不论是初始收敛速度还是后期收敛速度都比MPNLMS算法更优,可以在更少的迭代次数下达到稳态,稳态失调与MPNLMS算法的相当,没有下降,而且在滤波器长度减小的情况下,算法的性能依然良好.这是因为本文算法均衡了滤波器大、小系数之间的收敛过程,保证了在滤波器系数较小的情况下也能获得较快的收敛.
3.1.2实验2
选取与输入信号无关的高斯白噪声作为干扰信号,信噪比为30,dB,滤波器长度为512,滤波器系数变为的条件下进行收敛速度和稳定失调的对比实验,结果如图2所示.其中,在第2,500个采样点时刻系统发生时变.
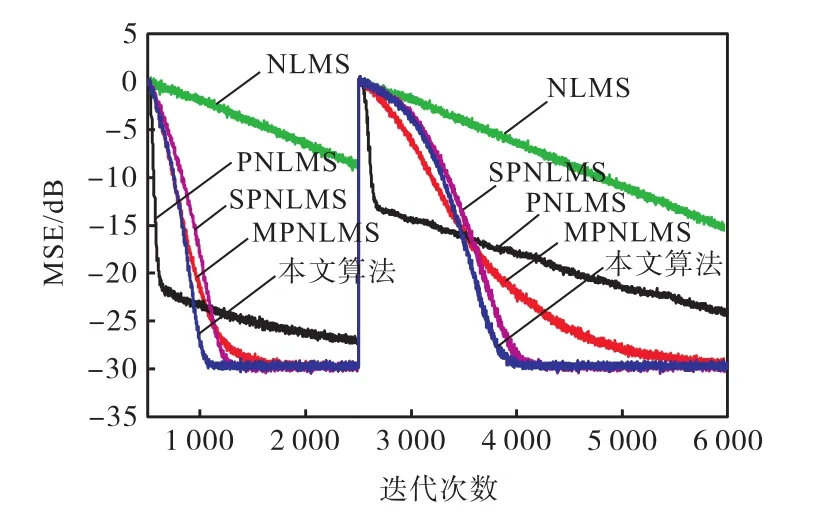
图2 时变情况下各种算法收敛速度和稳定失调性能的对比(SNR=30,dB,L=256)Fig.2Comparison of algorithms' convergence speed and steady performance under varying circumstances(SNR=30,dB,L=256)
由图2可以看出,在信噪比为30,dB时,本文算法仍具有较快的收敛速度,并且在系统发生时变的情况下,仍能很快地恢复为稳定状态,较MPNLMS和SPNLMS算法都有不同程度的提高.说明该算法具有很好的鲁棒性.
3.1.3实验3
选取实际的一段语音信号,添加延迟时间为283,ms的回声信号并与原信号叠加,利用本文算法进行回声消除,实验结果如图3所示.
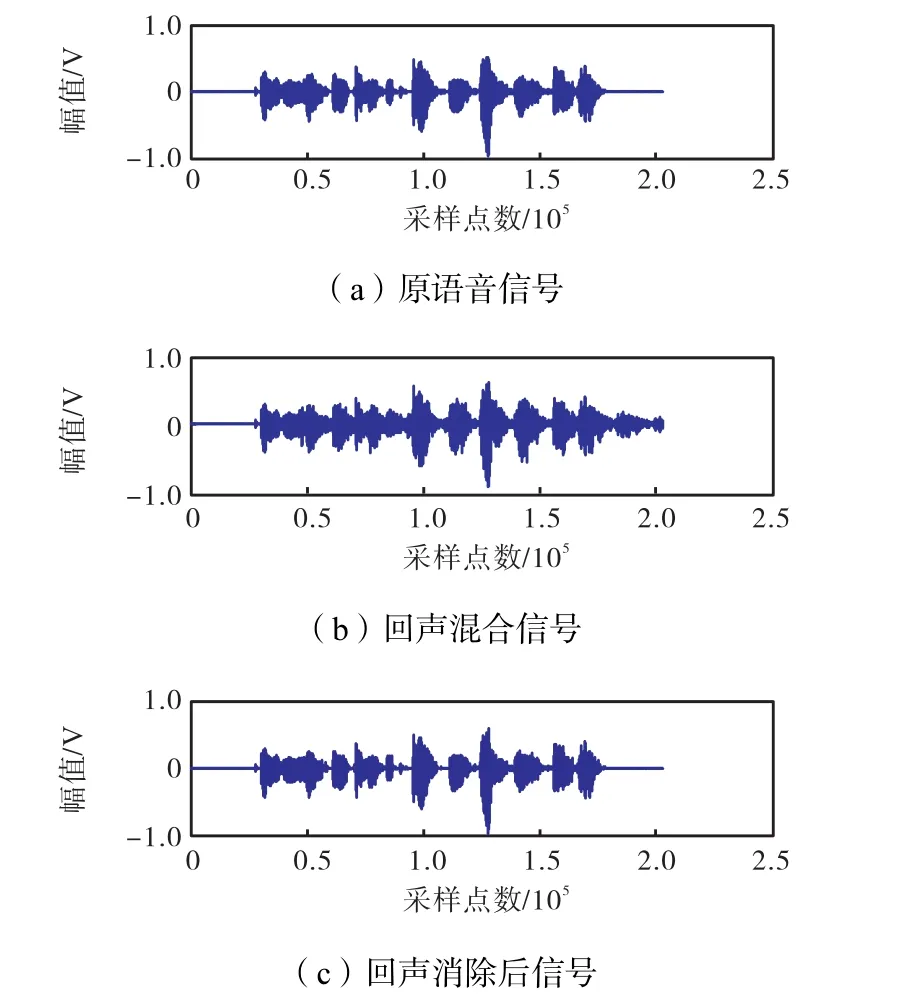
图3 回声消除后的时域波形Fig.3 Time domain waveforms after echo cancellation
由图3的时域波形可以看出经过回声消除后的信号与原语音信号比较接近,说明本文算法在进行实际的回声消除中具有可行性,且去噪效果非常明显,证明了该算法的有效性.
3.2算法复杂度分析
根据各算法运算过程,表1列出各类算法与本文算法每次系数更新即每个采样点所需的数学运算及其数量.
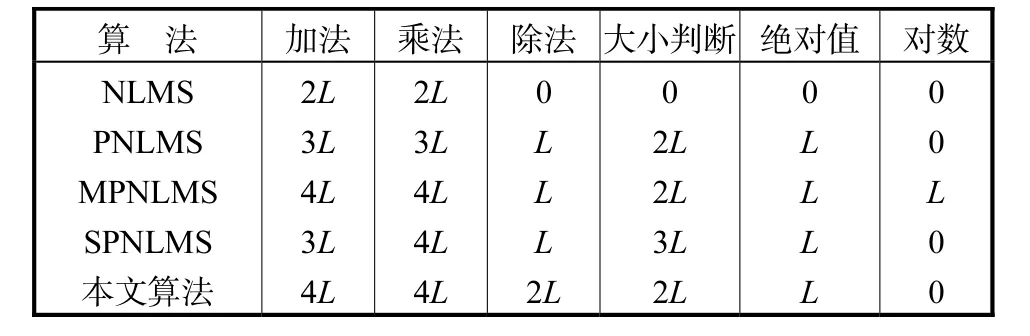
表1 各种算法的运算复杂度对比Tab.1 Comparison of algorithms' computational complexity
由表1可以看出,与MPNLMS算法相比,本文算法减少了L次对数运算,增加了L次除法运算.在 DSP平台上,对数运算的运行时间大约为除法运算的12倍,在PC平台上,对数运算的运行时间大约为除法运算的4.5倍,因此本文算法较大幅度地降低了算法复杂度,但性能优于MPNLMS算法.
4 结 语
PNLMS自适应滤波算法是一种针对稀疏冲激响应的快速有效的解决方法,其收敛速度与传统自适应算法相比有很大提高.本文提出的一种新的改进型PNLMS算法通过引入步长控制矩阵,平衡了滤波器大、小系数的更新,加快了收敛速度,有效地解决了PNLMS算法后期收敛速度慢的缺陷.在算法复杂度方面,本文所提算法优于已有的MPNLMS算法,克服了对数运算复杂度高的缺陷,且收敛速度优于MPNLMS算法,具有较好的鲁棒性.
[1] Haykin S S. Adaptive Filter Theory[M]. India:Pearson Education India,2008.
[2] Huang H C,Lee J. A new variable step-size NLMS algorithm and its performance analysis[J]. IEEE Transactions on Signal Processing,2012,60(4):2055-2060.
[3] Meher P K,Maheshwari M. A high-speed FIR adaptive filter architecture using a modified delayed LMS algorithm[C]// IEEE International Symposium on Circuits and Systems(ISCAS). Rio de Janeiro,Brazil,2011:121-124.
[4] Li X,Fan Y,Peng K. A variable step-size LMS adaptive filtering algorithm[C]//Proceedings of the 5th International Conference on Wireless Communications, Networking and Mobile Computing. Beijing,China,2009:2283-2286.
[5] 靳 翼,邵怀宗. 一种新的变步长 LMS 自适应滤波算法及其仿真[J]. 信号处理,2010,26(9):1385-1388. Jin Yi,Shao Huaizong. A novel variable step size LMS adaptive filtering algorithm and its simulation[J]. Signal Processing,2010,26(9):1385-1388(in Chinese).
[6] Mayyas K. A variable step-size selective partial update LMS algorithm[J]. Digital Signal Processing,2013,23(1):75-85.
[7] Werner S,De Campos M L R,Diniz P S R. Partialupdate NLMS algorithms with data-selective updating[J]. IEEE Transactions on Signal Processing,2004,52(4):938-949.
[8] Duttweiler D L. Proportionate normalized least-meansquares adaptation in echo cancelers[J]. IEEE Transactions on Speech and Audio Processing,2000,8(5):508-518.
[9] Gay S L. An efficient,fast converging adaptive filter for network echo cancellation[C]// Conference Record of the Thirty-Second Asilomar Conference on Signals,Systems & Computers. Pacific Grove,CA,USA,1998,1:394-398.
[10] Nekuii M,Atarodi M. A fast converging algorithm for network echo cancellation[J]. IEEE Signal Processing Letters,2004,11(4):427-430.
[11] Benesty J,Gay S L. An improved PNLMS algorithm[C]// IEEE International Conference on Acoustics,Speech,and Signal Processing(ICASSP). USA,2002,2:II-1881-II-1884.
[12] Deng H,Doroslovacki M. Improving convergence of the PNLMS algorithm for sparse impulse response identification[J]. IEEE Signal Processing Letters,2005,12(3):181-184.
[13] Deng H,Doroslovacki M. Proportionate adaptive algorithms for network echo cancellation[J]. IEEE Transactions on Signal Processing,2006,54(5):1794-1803.
[14] Liu L,Fukumoto M,Zhang S. Improvement of the mulaw proportionate NLMS algorithm[C]//IEEE International Symposium on Circuits and Systems(ISCAS). Taipei,China,2009:2045-2048.
[15] Liu L,Fukumoto M,Saiki S. An improved mu-law prop ortionate NLMS algorithm[C]// IEEE International Conference on Acoustics,Speech and Signal Processing(ICASSP). Taipei,China,2008:3797-3800.
[16] 文昊翔. 面向实时通信系统的自适应回声消除算法研究[D]. 杭州:浙江大学电气工程学院,2013. Wen Haoxiang. Adaptive Echo Cancellation Algorithms Towards Real-Time Communication System[D]. Hangzhou:School of Electrical Engineering,Zhejiang University,2013(in Chinese).
[17] 刘立刚,Fukumoto Masahiro,张世永. 一种变步长Proportionate NLMS自适应滤波算法及其在网络回声消除中的应用[J]. 电子学报,2010,38(4):973-978. Liu Ligang,Fukumoto Masahiro,Zhang Shiyong. A variable step-size Proportionate NLMS adaptive filtering algorithm and its application in network echo cancellation[J]. Acta Electronica Sinica,2010,38(4):973-978(in Chinese).
(责任编辑:赵艳静)
An Improved Proportionate NLMS Adaptive Filtering Algorithm
Guo Jichang,Zhang Xue,Qiu Linyao
(School of Electronic Information Engineering,Tianjin University,Tianjin 300072,China)
Step control matrix is introduced into proportionate normalized least mean square(PNLMS)algorithm,which considerably improves the initial convergence speed by setting different proportionate steps for different filter coefficients. However,the later convergence speed becomes lower than that of NLMS. To solve this problem,an improved PNLMS algorithm is proposed. A nonlinear reciprocal relationship between proportionate step and the current amplitudes of filter coefficients is established by quantitatively analyzing the convergence process. The simulation shows that the improved PNLMS algorithm has faster convergence speed and better robustness than PNLMS and MPNLMS algorithms. Moreover,the computational complexity of the algorithm is greatly reduced compared with MPNLMS algorithm.
adaptive filtering;echo cancellation;PNLMS algorithm
TP911.72
A
0493-2137(2016)09-0972-06
10.11784/tdxbz201412004
2014-12-01;
2015-04-22.
国家自然科学基金资助项目(60641011).
郭继昌(1966— ),男,博士,教授.
郭继昌,jcguo@tju.edu.cn.
网络出版时间:2015-04-30. 网络出版地址:http://www.cnki.net/kcms/detail/12.1127.N.20150430.1119.001.html.
