复杂涌流下水下自主航行器横滚抑制控制仿真
2016-11-02王程成
赵 威,王程成
(1中国人民解放军91640部队,广东湛江 524064;2中国石油西气东输管道公司,太原 030000)
复杂涌流下水下自主航行器横滚抑制控制仿真
赵 威1,王程成2
(1中国人民解放军91640部队,广东湛江524064;2中国石油西气东输管道公司,太原030000)
在复杂的海洋涌流背景下,水下自主推进航行器受到扰动较大,出现横滚导致控制稳定性下降,提出一种基于模糊PID扰动抑制的复杂涌流下水下自主航行器横滚抑制算法。构建在复杂涌流下的水下自主航行器运动状态模型,在航行器的纵向运动全包线内对横舵角、横滚角、回旋角等运动约束参量进行定常运动分析,采用模糊PID神经网络控制模型进行控制律的改进设计,结合Lyapunov稳定性原理进行横滚抑制和误差修正,实现控制算法改进。仿真结果表明,采用该控制算法进行复杂涌流下水下自主航行器横滚抑制控制,具有较好的输出响应跟踪性能,有效抑制横滚,提高了水下自主航行器的稳定控制能力,鲁棒性较好。
水下自主航行器;横滚;控制;扰动;鲁棒性
0 引 言
水下自主航行器(Underwater Autonomous Vehicle,UAV)通常所指的是鱼雷、水声诱饵、水下潜水艇等,水下自主航行器是利用无线电遥控设备和自备的程序控制装置操纵的水下航行器,具有自备动力推进的功能。水下自主航行器按应用领域,可分为军用与民用,军用方面主要有鱼雷和潜艇等,民用方面主要有水下探测搜救仪、水下捕捞装置等。水下自主航行器由于其机动性好、隐蔽性强等特点,广泛应用在水下目标攻击、水下信息的监测探测、数据采集和情报搜集等方面,展示了较好的军事和民用价值。水下自主航行器的稳定性航行控制是保证航行器自主推进的关键技术,在复杂的海水涌流环境下,水下航行器受到的扰动较大,容易产生航向偏移和横滚,控制性能不好,研究水下航行器的优化控制技术具有重要意义。
传统的水下航行器控制方法普遍采用支持向量机控制算法、PID神经网络控制算法、时滞控制算法等[1-3],如美国的MK46鱼雷,其自动驾驶仪采用的就是PID控制算法,法国的“海鳝”鱼雷,采用的是时滞二自由度的控制算法进行驾驶仪控制系统设计。上述的控制系统和控制算法设计中,在航行器的纵向运动全包线内构建运动方程,通过非线性数学模型构建得到多个特定的航行状态下控制参量进行最小二乘拟合处理,提高了水下航行器的姿态控制的稳定性[4],但上述控制方法采用插值或者拟合策略,使控制器参数在有限个线性模型之间连续变化,导致姿态角误差跟踪过程中容易出现失真。文献[5]采用H∞鲁棒控制方法进行了水下自主航行器的横滚控制器的设计,能够基本满足姿态控制的要求,但是该控制系统没有进行扰动抑制,鲁棒控制没有学习的能力,在设计时要求知道不确定的上界值,导致自适应性能不好。
针对上述问题,本文提出一种基于模糊PID扰动抑制的复杂涌流下水下自主航行器横滚抑制算法,构建在复杂涌流下的水下自主航行器运动状态模型,在航行器的纵向运动全包线内对横舵角、横滚角、回旋角等运动约束参量进行定常运动分析,采用模糊PID神经网络控制模型进行控制律的改进设计,结合Lyapunov稳定性原理进行横滚抑制和误差修正,实现控制算法改进。最后通过仿真实验进行了性能测试,展示了本文控制算法的优越性能。
1 复杂涌流下水下航行器的运动数学模型构建和控制约束参量分析
1.1复杂涌流下水下航行器的运动数学模型构建
为了实现对复杂的海洋涌流背景下水下自主推进航行器的有效控制,抑制横滚和航向误差,需要首先构建复杂涌流下水下航行器的运动数学模型构建,通过横滚抑制控制,进行横滚和俯仰角度跟踪误差拟合,提高水下航行器的航行稳定性,在建立复杂涌流下水下航行器运动模型之前,先做如下几点基本假设:
1)水下航行器为刚体,其外形关于纵平面x1Oy1平面对称;
2)水下航行器在海水背景下航行受到的涌流的流体动力位置力及海洋环境变化的阻尼力满足线性假设;
3)忽略因声学环境和海浪的线性干扰导致的误差;
4)近似认为地面坐标系为惯性坐标系[6-10]。
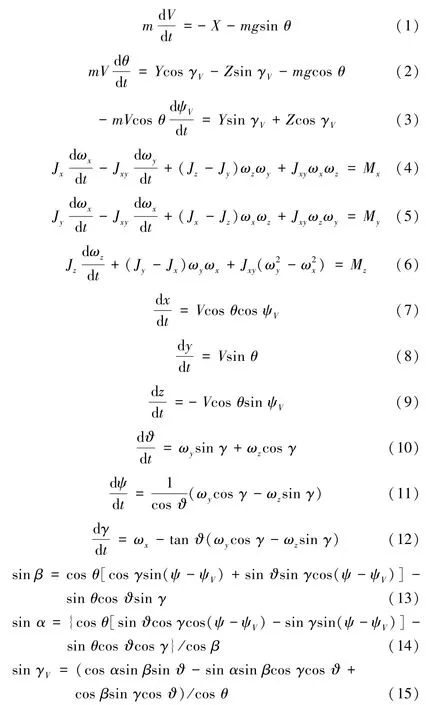
根据上述假设,构建水下航行器的运动数学模型,水下航行器的运动数学模型包括了质心动力学方程和稳态方程,根据动量矩和动量矩定理,可以得到水下航行器在纵向运动矢量空间内的运动方程组如式(1)-(15)所示。

1.2控制约束参量和控制目标函数构建


水下航行器经历过的横滚位置记为Pi=(pi1,pi2,…,piD),当被控对象随着概率随机初始化作用,自适应惯性权受到姿态参量样本的约束,且系统达到平衡时,得到最小信息熵函数控制下的涌流背景下的水下航行器惯性权重能够收敛到最优解,以·x(t)=Ax(t)+Bu(t)和uc(t)= Kxc(t)的形式给出水下航行器航行的稳定性控制结构模型,从而得到航行控制的闭环系统为:

假设在未知的不确定扰动下,运动参数为常数,此时水下航行器做等速水平直线运动的惯性权重ω按照下式取值:

其中,ωmax和ωmin分别是惯性权重上下限,采用最小信息熵进行泛函加权,对被控对象进行模式识别和稳定性自适应修正。此时,给定线性化小扰动特性函数Gm(s),从输出端引出反馈向量函数,绕开了时滞环节e-tms的影响,得到涌流背景下的水下航行器横滚抑制控制状态函数为:

通过上述系统函数,采用自适应算法在线调整权值,基于LM-Smith神经网络泛函特征方程,对航行控制的位置偏移进行完全跟踪补偿,得到:

根据上述分析得知控制系统收敛,表示在涌流背景下的水下航行器姿态稳定特性指标函数为:

其中,e是平均绝对误差性能函数均方误差,ek是纵向运动线性状态的第k个分量。经由如上分析,构建了被控对象模型和控制目标函数,以此为基础进行水下自主航行器的横滚抑制控制优化设计。
2 控制算法改进及稳定性证明
在复杂的海洋涌流背景下,水下自主推进航行器受到扰动较大,出现横滚,传统的控制算法在纵向运动控制中横舵角产生非线性误差,控制精度不好,为了克服传统方法的弊端,本文提出一种基于模糊PID扰动抑制的复杂涌流下水下自主航行器横滚抑制算法,在航行器的纵向运动全包线内对横舵角、横滚角、回旋角等运动约束参量进行定常运动分析,采用模糊PID神经网络控制模型进行控制律的改进设计,结合Lyapunov稳定性原理进行横滚抑制和误差修正,改进算法的设计过程描述如下:将水下自主航行器在涌流背景下的水下航行姿态角控制的非线性系统进行分解,定义Lyapunov函数为:

则对Lyapunove函数求导,得到:
根据上述分析可见,水下自主航行器在涌流背景下的水下航行控制的基准运动为一个定常运动,Lyapunov函数求导小于零,表示姿态控制系统是稳定而且有上界的,结合基准运动方程,求解纵向运动参数,得到:

通过对系统某些参数的测量,在水平等速直线运动状态下,得到水下自主航行器在涌流背景下的水下航行姿态角控制的等效控制律为:


通过上述分析,得到定常运动下的水下航行器变结构控制律演变为:

由此实现对水下自主航行器在涌流背景下的水下航行横滚的抑制控制设计和改进。进一步,进行稳定性证明。
证 明 假设水下航行器的纵向运动参数为一个非线性的向量函数,采用自适应算法在线调整权值,取:

在纵向定常运动下,航行器做等速回旋运动的稳定性Lyapunov函数为:其中,给出如下式所示的模型:


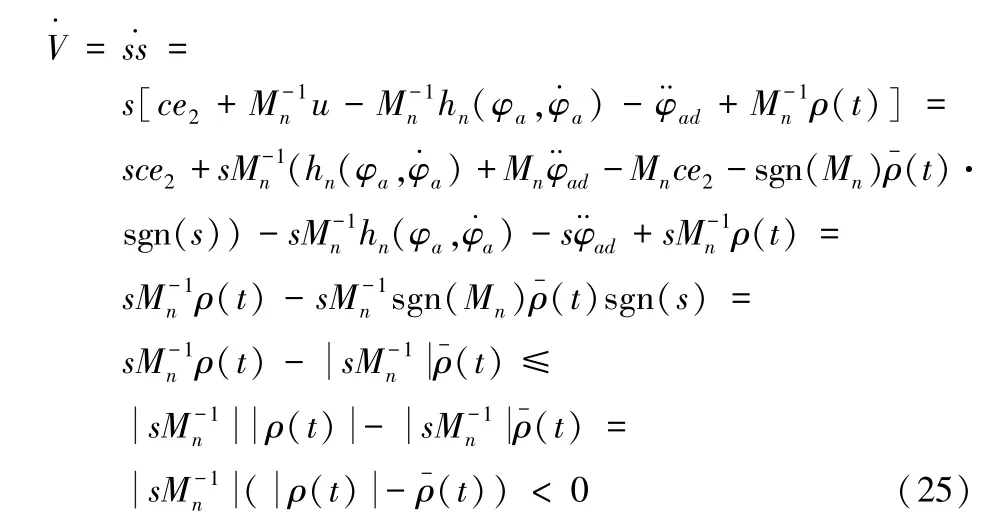
对应的上界估计值满足Lyapunov稳定性原理,采用本文设计的模糊PID扰动抑制控制器可以保证控制系统的渐近稳定。根据Lyapunov稳定性原理,得到控制器的Lyapunov函数的求导过程为:
可见,上式小于零,因此,本文设计的控制算法是渐进稳定的,航向偏移误差收敛到零,控制鲁棒性较好。
命题得证。
3 仿真分析
为了测试本文设计的控制算法在抑制水下自主航行器的横滚和航向误差修正方面的应用性能,进行仿真测试实验分析,实验中,选择了ADI公司的ADSP-BF537作为数字处理芯片,进行在涌流背景下的水下航行控制系统的数字信号处理,首先进行运动姿态数据采集,对各个通道数据进行8通道均匀线列阵A/D采样,以减少扰动对稳定性控制的干扰,得到水下自主航行器在涌流背景下的水下航行的纵向通道的误差模型为:

根据上述模型,进行控制输出的姿态角仿真测试,在相同实验参数下,采用本文方法和传统方法,进行水下自主航行器的横滚抑制仿真,以控制输出的姿态角误差u为测试指标,得到仿真结果如图1所示。
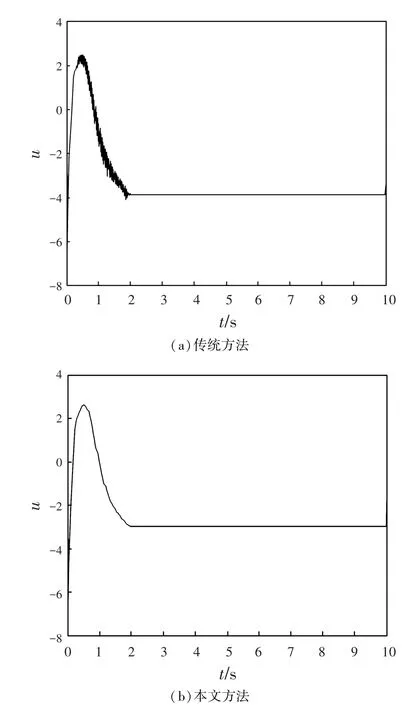
图1 水下航行器的控制输出的姿态角误差对比Fig.1 Comparison of attitude angle error of control output of underwater vehicle
从图中可以看出,采用本文方法进行水下航行器的控制,能有效抑制了横滚误差,进行复杂涌流下水下自主航行器横滚抑制控制,输出的姿态角误差收敛到零,具有较好的输出响应跟踪性能,提高了水下自主航行器的稳定控制能力,鲁棒性较好。
4 结束语
水下自主航行器的稳定性航行控制是保证航行器自主推进的关键技术,在复杂的海水涌流环境下,水下航行器受到的扰动较大,容易产生航向偏移和横滚,控制性能不好,研究水下航行器的优化控制技术具有重要意义。本文提出一种基于模糊PID扰动抑制的复杂涌流下水下自主航行器横滚抑制算法,构建在复杂涌流下的水下自主航行器运动状态模型,采用模糊PID神经网络控制模型进行控制律的改进设计,结合Lyapunov稳定性原理进行横滚抑制和误差修正,实现控制算法改进。研究得出,采用该控制算法进行复杂涌流下水下自主航行器横滚抑制控制,具有较好的输出响应跟踪性能,有效抑制横滚,提高了水下自主航行器的稳定控制能力,性能优越于传统方法,展示了较高的应用价值。
[1]陆兴华,吴恩燊,黄冠华.基于Android的智能家居控制系统软件设计研究[J].物联网技术,2015,35(5):692-695.
[2]MAHMOUDEE.Complexcompletesynchronizationoftwo nonidenticalhyperchaoticcomplexnonlinearsystems[J]. Mathematical Methods in the Applied Sciences,2014,37(3):321-328.
[3]PALOMARES I,MARTINEZ L,HERRERA F.A consensus model to detect and manage non-cooperative behaviors in large scale group decision making[J].IEEE Trans on Fuzzy System,2014,22(3):516-530.
[4]ZHANG H,WANG Z,LIU D A.Comprehensive review of stability analysis of continuous-time recurrent neural networks[J].IEEE Trans on Neural Networks and Learning Systems,2014,25(7):1229-1262.
[5]葛立志.基于全弹道控制分析的水下航行器攻击模型视景仿真[J].舰船电子工程,2015,35(3):137-141.
[6]陆兴华,陈平华.基于定量递归联合熵特征重构的缓冲区流量预测算法[J].计算机科学,2015,42(4):68-71.
[7]周勇,甘新年,胡光波,等.鱼雷制导控制系统多通道控制加权算法设计[J].现代电子技术,2014,37(19):14-17.
[8]赵威.强海水混响背景下水中兵器攻击目标检测研究[J].智能计算机与应用,2016,6(2):51-54.
[9]赵石磊,郭红,刘宇鹏.基于轨迹跟踪的线性时滞系统容错控制[J].信息与控制,2015,44(4):469-473.
[10]明平松,刘建昌.随机多智能体系统稳定性综述[J].控制与决策,2016,31(3):385-393.
Simulation of roll inhibition control of underwater autonomous vehicle in complex surge
ZHAO Wei1,WANG Chengcheng2
(1 No.91640 Troops of PLA,Zhanjiang Guangdong 524064,China;2 China Petroleum West East Gas Pipeline Company,Taiyuan 030000,China)
Under the complex background of ocean current,water self propulsion vehicle subject to greater disturbance,roll leading to decline in the stability control,based on Fuzzy PID to suppress the disturbance underwater autonomous vehicle roll suppression algorithm of the complex sympathetic inrush is proposed.Underwater independent vehicle motion model of complex surge flow is constructed,in the vehicle longitudinal motion envelope on the horizontal rudder angle,roll angle and swing angle motion constraint parameters were constant motion analysis,adopted fuzzy PID neural network control model to the improved design of the control law,roll suppression and error correction according to the Lyapunov stability theory,to realize the control algorithm improvement.Simulation results show that using this control algorithm complex freshness of underwater autonomous navigation transversely rolling inhibitory control,has good output tracking performance,effectively inhibit the roll,improve the ability to sail of the underwater autonomous navigation,and it has a better robustness.
underwater autonomous vehicle;roll;control;disturbance;robustness
TP276
A
2095-2163(2016)03-0011-04
2016-05-04
赵 威(1979-),男,学士,高级工程师,主要研究方向:水中兵器工程及技术保障;王程成(1987-),男,学士,助理工程师,主要研究方向:电气工程与自动化。
