浮式风机支撑结构在气动载荷和波浪载荷联合作用下的运动响应研究
2016-11-02李良碧
倪 鹏, 李良碧
(江苏科技大学 船舶与海洋工程学院, 江苏 镇江 212003)
浮式风机支撑结构在气动载荷和波浪载荷联合作用下的运动响应研究
倪鹏, 李良碧
(江苏科技大学 船舶与海洋工程学院, 江苏 镇江 212003)
海上漂浮式风机支撑结构具有良好的稳定性,是支撑风机正常工作的重要因素之一,而风机正常工作时叶轮旋转产生巨大气动载荷会对浮式支撑结构产生影响。目前,对风机浮式支撑结构动态响应的研究主要集中在极端海况下浮式风机支撑结构的运动响应,而考虑气动载荷影响的研究则较少。采用流体动力学理论和空气动力学理论并结合有限元方法对某三浮体式风机支撑结构在风、浪、流载荷联合作用下的运动响应进行分析,其中风载荷将分为考虑气动载荷、不考虑气动载荷、将气动载荷简化为固定载荷三种情况。研究结果表明:风机正常工作时支撑结构的运动响应主要受气动载荷影响;支撑结构的运动响应主要表现在纵荡,垂荡和纵摇方向;考虑气动载荷时,支撑结构在纵荡和垂荡方向上的运动响应均小于将气动载荷简化为固定载荷的情况。因此,考虑气动载荷对支撑结构的影响在工程实践中具有较大意义,为海上风机支撑结构的稳定性研究提供了理论依据。
海上浮式风机;动力响应;支撑结构;气动载荷
0 引言
当今世界,煤、石油等常规能源日益短缺,风能由于其安全、无污染和可再生等特点逐渐成为诸多国家和地区关注的焦点[1]。深海风力发电是风电产业发展的新方向,深海海域风能资源丰富,具有巨大的风电开发空间。水深超过60 m的海域,使用固定式海上风机会大幅增加建造成本,而漂浮式海上风机可以很好地解决这一问题[2]。目前,国内外对风机浮式支撑结构动态响应的研究还较少,很少考虑由于风轮转动产生的气动载荷对支撑结构的作用。文献[3-5]研究了风机平台的水动力性能,其中风机气动载荷由风轮在额定风速下的轴向推力和转矩公式计算得到,该气动载荷并不随时间变化。对于风机气动载荷,采用比利时Samtech公司研发的SAMCEF for Wind Turbine(S4WT)软件进行计算,与FAST软件相比,S4WT还考虑了部件柔性、非线性、部件之间及部件与控制系统之间的耦合效应。目前,海洋工程中常用的水动力学计算软件如SESAM等,在模拟随时间变化的风机气动载荷方面还有一些限制,而ANSYS/AQWA可以模拟。因此,该文设置了三种情况并结合水动力学计算软件ANSYS/AQWA对漂浮式支撑结构在海洋环境载荷作用下的动态响应进行了研究,三种情况分别为考虑风机气动载荷的情况、不考虑气动载荷的情况以及将气动载荷简化为固定载荷的情况。
1 环境载荷理论
1.1空气动力载荷
叶素-动量理论是目前较常用的计算旋转叶片气动载荷的理论。其主要思想是将风轮叶片沿展向分成许多微段(即叶素),并假设流体在每个叶素上的流动彼此间互不干扰,保持独立,故可将叶素理想化为二元翼型,最后将作用在每个叶素上的力和转矩沿展向积分,即可求得作用在叶轮上的推力和转矩。单个叶素上的推力和转矩计算如下[6]:
(1)
(2)
式中:ρ为空气密度;W为风速;B为叶片数量;C为叶素剖面弦长;C1为叶片升力系数;Cd为叶片阻力系数;φ为入流角;r为叶素至轮毂中心距离。
1.2水动力载荷
1.2.1莫里森方程
对于小尺度结构物,通常采用著名的莫里森方程计算其受到的波浪载荷。小尺度结构物,一般是指结构物的等效特征直径D与波长λ之比小于0.2,可忽略结构物对波浪运动的影响。
结构物单位长度上受到水平波浪力的表达式为:
(3)
则整个结构物受到的水平波浪力可由下式求出:
(4)
式中:ρ为海水密度;D为构件直径;d为水深;η为z=0时的波面方程;u为水质点沿水平方向的速度分量;du/dt为水质点沿水平方向的加速度分量;CD为拖曳力系数;CM为惯性力系数。
1.2.2三维势流理论
对于大尺度结构物,其存在会对入射波产生明显的绕射效应,因此需要采用基于绕射和辐射理论的势流理论来计算大尺度结构物受到的波浪载荷。当入射波受结构物干扰后,流场内任一点处的总速度势由三部分组成:结构物扰动前的入射波的速度势φi、结构物的存在对入射波扰动产生的绕射波的速度势φd和结构物本身运动产生的辐射波的速度势φr,总速度势可表示为[7]:
(5)
在求出结构物速度势之后,根据伯努利方程求出结构物湿表面上各点的水动压力为:
(6)
沿着结构物湿表面积分可以得到作用于结构物表面的力和力矩:
(7)
(8)
式中:S为结构物的湿表面。
2 模型概况
该文选取某三浮体式半潜平台[7]作为海上浮式风力发电机的支撑结构,风力机模型选取NREL-5 MW风力机[8],风力机主要参数见表1,三浮筒式半潜平台参数见表2。平台主体如图1所示,由三个上部浮体,三个下部浮体,一个主浮体,15根连接杆以及锚泊系统组成,下部浮体的底部各附连一根锚链以限制平台的运动,设计水深100 m。风机塔架与主浮体相连接,坐标系如图2所示,服从右手坐标系,坐标原点位于主浮体与水线面交点处。
图1 三浮筒半潜平台
图2 三浮筒式海上风机
表1 NREL-5 MW风力发电机主要技术参数

风力机参数参数值额定功率/MW5叶片数量3风轮直径/m126
续表1 NREL-5 MW风力发电机主要技术参数
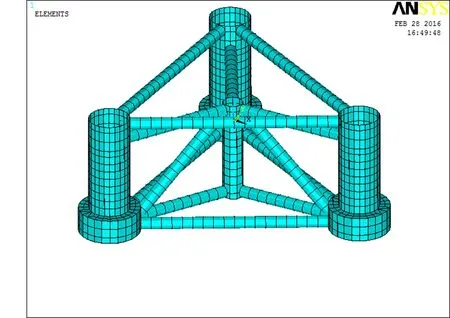
图3 湿表面模型
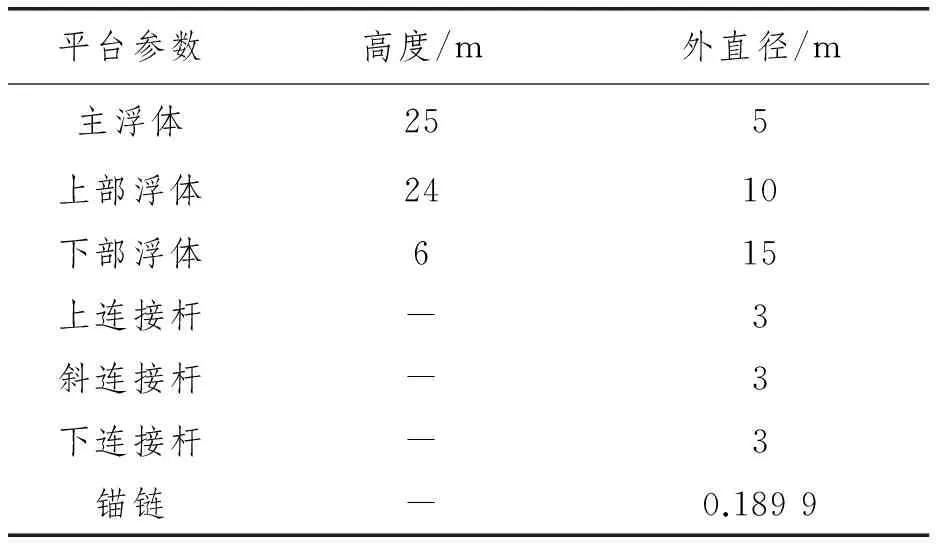
平台参数高度/m外直径/m主浮体255上部浮体2410下部浮体615上连接杆-3斜连接杆-3下连接杆-3锚链-0.1899
在ANSYS中建立三浮体式风机平台,并对所建模型进行网格化分,如图3所示。网格的大小根据需要计算的最大波浪频率来设定,要求一个波长至少要覆盖7个最大单元尺寸。
3 模拟结果及分析
3.1频域运动响应
为了评估三浮体式海上风机平台的运动性能,采用ANSYS/AQWA-LINE对风机平台进行频域响应分析。假定风、浪、流均沿X轴,故只需分析平台在纵荡、垂荡和纵摇方向上的运动响应。
图4为三浮体式海上风机平台在纵荡、垂荡和纵摇方向上的运动响应。
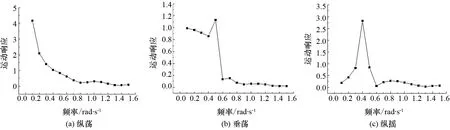
图4 纵荡、垂荡和纵摇的运动响应
(1) 纵荡方向如图4(a)所示,运动响应随着波浪频率的增加而减小,当f>0.8 rad/s时(f为波浪频率),逐渐趋于0,纵荡固有频率小于0.1 rad/s。
(2) 垂荡方向如图4(b)所示,运动响应峰值出现在0.5 rad/s附近,当f>0.5 rad/s时,迅速减小,至f=0.8 rad/s时趋于0,垂荡固有频率为0.5 rad/s。
(3) 纵摇方向如图4(c)所示,运动响应随着波浪频率的增大先增大后减小,峰值出现在f=0.4 rad/s附近,这表明在波浪频率接近0.4 rad/s时,风机平台会出现较大的纵摇响应。
3.2时域运动响应
3.2.1载荷工况
风机选址在北大西洋苏格兰东北部的Stevenson地区某海域,风机正常工作时风轮转动会产生很大的气动载荷,为了研究气动载荷对风机平台运动响应的影响,分别对风机平台在考虑气动载荷(工况1),不考虑气动载荷(工况2)以及将气动载荷简化为固定载荷(工况3)三种情况下进行时域运动响应分析,计算时长300 s,时间步长0.01 s,载荷工况见表3。波浪采用P-M谱,有义波高为1.5 m,周期为7.08 s;风机正常工作时轮毂高度处风速为12 m/s;海流速度为0.68 m/s;风、浪、流均垂直入射风机迎风面。海况参数如表4所示。
工况1风机正常工作产生的气动载荷时程曲线由SAMCEF for Wind Turbines(S4WT)计算,在额定风速下采用S4WT软件对三浮体式风机进行动力响应计算,风、浪、流均垂直入射风机迎风面,其中风载荷是利用TurbSim模块生成的湍流风,波浪载荷是利用Waveload模块生成的P-M不规则波,得到气动载荷后以外力形式导入ANSYS/AQWA-NUAT进行计算。
工况3考虑最恶劣情况,选取合力最大时的气动载荷作为固定载荷进行计算。

表3 载荷工况
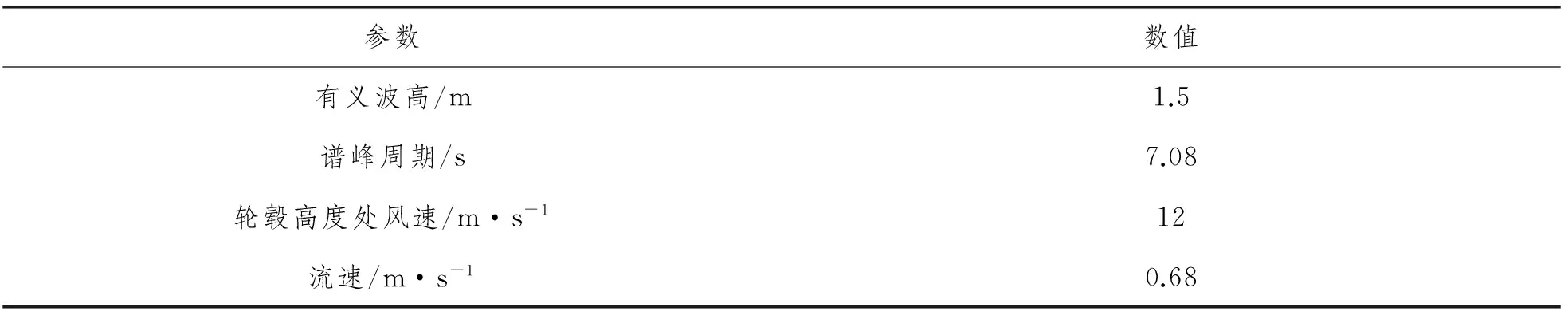
表4 海况参数
3.2.2结果与分析
图5为基于ANSYS/AQWA时域分析得到的三种情况下,三浮体式风机平台纵荡响应时间历程曲线,表5为其纵荡运动的幅值。由图5、表5可知:纵荡方向响应的最大幅值在工况1考虑气动载荷情况下为7.42 m;工况2不考虑气动载荷情况下为0.001 37 m;工况3将气动载荷简化为固定载荷情况下为8.78 m。与工况1、工况3相比,工况2不考虑气动载荷情况下纵荡响应幅值非常小,几乎为零,由此可见:在评估海上风机稳定性时,不能忽略风机工作时产生的气动载荷。工况1纵荡响应的平均值为5.98 m,小于工况3纵荡响应的平均值6.48 m。
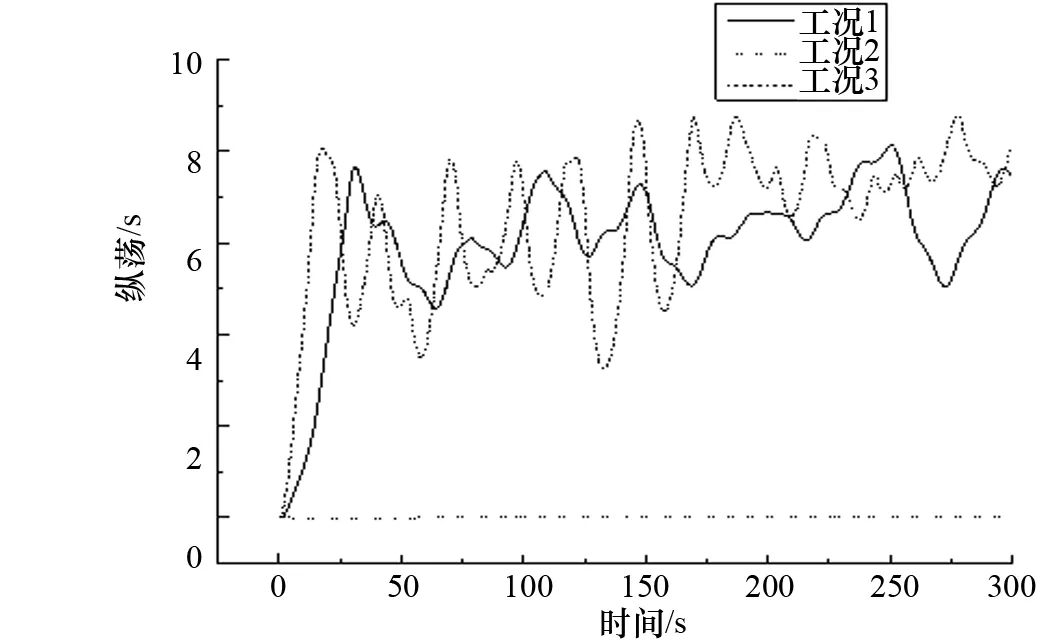
图5 纵荡运动时程曲线
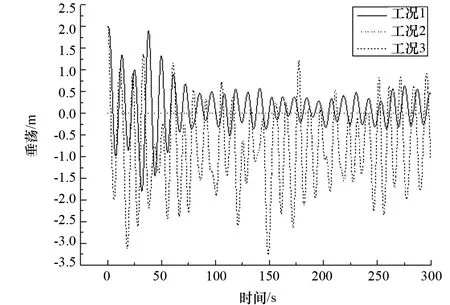
图6 垂荡运动时程曲线
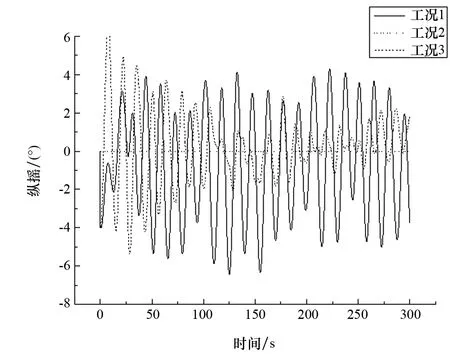
图7 纵摇运动时程曲线
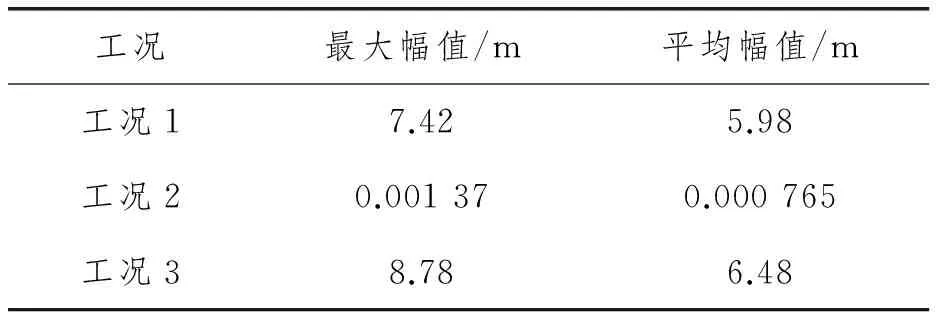
工况最大幅值/m平均幅值/m工况17.425.98工况20.001370.000765工况38.786.48
图6为三浮体式风机平台垂荡响应的时间历程曲线,表6为垂荡运动幅值。由图6、表6可知:工况1、工况2和工况3垂荡方向响应的最大幅值分别为2 m、0.000 16 m和3.27 m。与工况1、工况3相比,工况2的垂荡响应幅值非常小。工况1和工况3垂荡方向响应的平均值分别为0.1 m和0.82 m,大部分情况下工况1的垂荡响应幅值小于工况3,由此可见将气动载荷简化为固定载荷评估风机平台运动性能的方法偏保守。
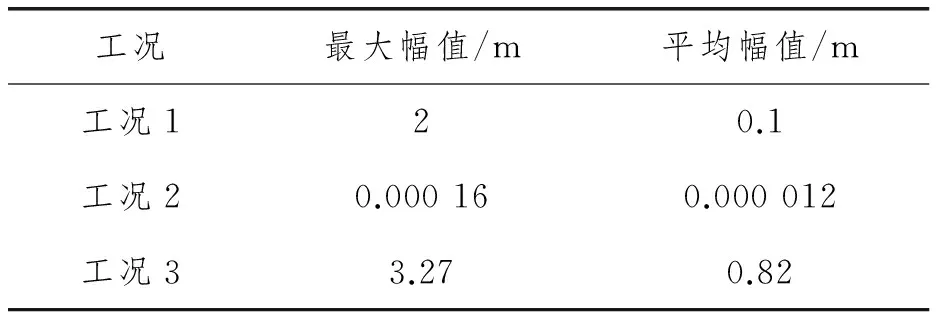
表6 垂荡运动幅值
图7为三浮体式风机平台纵摇响应的时间历程曲线,表7为纵摇运动幅值。由图7、表7可知:工况1、工况2和工况3纵摇方向响应的最大幅值分别为6.568°、0.000 98°和5.966°,与工况1、工况3相比,工况2的纵摇响应幅值非常小;工况1和工况3纵摇方向响应的平均值分别为0.708°和0.201°;工况3在0 ~25 s之间达到纵摇响应峰值后,响应幅值逐渐减小,而工况1纵摇响应幅值则较为稳定。因此,将气动载荷简单地简化为固定载荷并不能准确地评估风机平台的运动性能。

表7 纵摇运动幅值
4 结论
该文以NREL-5MW海上风机为基础,采用ANSYS/AQWA-LINE模块对三浮体式风机平台进行频域响应分析,然后采用AQWA-NUAT模块分别在考虑气动载荷、不考虑气动载荷以及将气动载荷简化为固定载荷三种情况下,对三浮体式风机平台在时域内的运动响应进行了分析,得到如下结论:
(1) 三浮体式风机平台运动响应主要集中在低频波浪阶段,当波浪频率f>0.8 rad/s时,各自由度方向的运动响应逐渐减小并趋于零。
(2) 纵摇方向的运动响应随着波浪频率的增大先增大后减小,峰值出现在0.4 rad/s附近,这表明当波浪周期接近15.7 s左右时,平台会出现较大纵摇响应。
(3) 由时域分析发现,不考虑气动载荷的工况2在纵荡、垂荡和纵摇方向上的响应幅值远小于考虑气动载荷的工况1和工况3。因此,在研究漂浮式风机平台运动性能时不能忽略风机正常工作时产生的气动载荷对平台的影响。
(4) 考虑气动载荷的工况1在纵荡和垂荡方向上的响应幅值及平均值均小于将气动载荷简化为固定载荷的工况3。工况3在0~25 s之间达到纵摇响应峰值后,响应幅值逐渐减小,而工况1纵摇响应幅值则较为稳定,由此可见工况3中将随时间变化的气动载荷简单的简化为固定载荷并不能准确的评估风机平台的运动性能。
[1]ZHENG Chong-wei, HU Qiu-liang, SU Qin. Research progress of offshore wind energy resources at home and abroad[J]. Ocean Development and Management, 2014,40(6):25-32.
[2]Musial W, Butterfield S, Boone A. Feasibility of floatingplatform systems for wind turbines [R]. Golden, CO,USA: National Renewable Energy Laboratory, 2003.
[3]丁勤卫,李春,周国龙,等. 基于AQWA的漂浮式风力机驳船式平台的动态响应[J]. 水资源与水工程学报,2015,26(2):150-155.
[4]丁勤卫,李春,成欣,等. 漂浮式风力机驳船式平台响应特性分析[J]. 上海理工大学学报,2015,37(5):425-432.
[5]张扬,李春,叶舟,等. 浮式风机平台风浪流载荷动态响应研究[J]. 能源工程,2015,35(5):20-27.
[6]Burton T, Sharpe D, Jenkins N et al. Wind Energy Handbook[M] . Wiley & Sons, New York, USA, 2001.
[7]LI Jia-wen, Tang You-gang, Wang Bin. Motion Characteristics of Novel Floating Foundation for Offshore Wind Turbine[J]. Transactions of Tianjin University, 2016,22(5):57-63.
[8]朱红娟. 深海浮式风机支撑结构的初步设计和关键技术研究[D]. 镇江:江苏科技大学, 2012.
[9]J Jonkman, S Butterfield, W Musial, et al. Definition of a 5-MW Reference Wind Turbine for Offshore System Development[R].National Renewable Energy Laboratory(NREL), Golden, CO,2009.
Dynamic Response of Supporting Structure of Offshore Floating Wind Turbine Considering Aerodynamic Load
NI Peng, LI Liang-bi
(Department of Naval Architecture and Ocean Engineering, Jiangsu University of Science and Technology,Jiangsu Zhenjiang 212003,China)
The stability of the supporting structure of an offshore wind turbine could be greatly influenced by the aerodynamic load during its normal working conditions. At present, most researches on the dynamic response of supporting structure of offshore floating wind turbine were mainly focused on the extreme sea conditions, while the influence of the aerodynamic load was rarely considered, so it is necessary to be studied. In the paper, the dynamic response of the supporting structure of the three pontoons offshore wind turbine under the wind, wave and current load were analyzed with the hydrodynamic theory and aerodynamic theory combined with the finite element method. Moreover, there are three cases of wind load, and that is the aerodynamic load considered, the aerodynamic load not to be considered and the aerodynamic load simplified as a fixed load. The results are as follows: The dynamic response of the offshore wind turbine during the normal working conditions is mainly affected by the aerodynamic load. The response of the supporting structure mainly show surge, heave and pitch. Under the condition of the aerodynamic load simplified as a fixed load, the responses of surge, heave and pitch are greater than that of considering the aerodynamic load. Therefore, considering the aerodynamic load has more practical meaning in engineering practice, and it provides the theory foundation for the study of the stability of the supporting structure of offshore wind turbine.
offshore floating wind turbine; fynamic response; supporting structure; aerodynamic load
2016-01-05
倪鹏(1992-),男,硕士研究生。
1001-4500(2016)04-0080-07
TM315
A
