空间相机CCD像面拼接重叠像元数分析与计算
2016-10-31闫得杰吴伟平孙天宇
闫得杰,吴伟平,孙天宇
(中国科学院 长春光学精密机械与物理研究所,长春 130033)
空间相机CCD像面拼接重叠像元数分析与计算
闫得杰,吴伟平,孙天宇
(中国科学院 长春光学精密机械与物理研究所,长春130033)
为了避免空间相机在侧摆成像时多片CCD的拼接处出现缝隙,造成部分目标信息缺失且获取的图像无法正常拼接的问题,根据CCD推扫成像的工作原理和像移补偿残差对图像出现缝隙的原理进行分析,通过采用重叠像元的方法克服了图像缝隙的问题;根据实际工程需求对像面重叠像元数进行计算,对重叠像元数提出具体要求;根据实例计算得出,在96级积分级数下允许的偏流角误差不大于12'和偏流机构的偏差为1'的前提下,像面拼接时相邻两片CCD之间的重叠像元数计算值应大于15,考虑误差及安装多重因素增加一定的余量,重叠像元数为40完全满足地面覆盖宽度10 km的要求。
空间相机;重叠像元;像面拼接;图像缝隙
0 引言
随着空间应用技术的发展,空间相机的应用也越来越广泛。同时对空间相机的要求也越来越高。不仅对空间相机获取信息的准确程度的要求越来越高,而且对获取信息的实时性也越来越高。为了增加对地观测能力,需要增加相机视场角。但相机的视场角不可能任意增加,尤其在通过加长焦距来提高分辨率的情况下,镜头视场角减少,地面照相覆盖宽度变小[1-3]。为了及时对所感兴趣的目标进行观测,快速有效获得高质量图像,仅仅多片拼接后的地面覆盖宽度已不能满足完全宽覆盖以提高重访周期的要求。因此很多飞行器采用了侧摆成像技术,即增加相机对星下点两侧照相的能力。对于军用侦查相机,侧摆照相技术更为重要[4-6]。采用侧摆成像技术可以增加地面覆盖宽度并可以提高重访周期[7]。针对拼接的CCD像面采用侧摆成像的方式就要解决随之带来的相关问题。对于飞行器来说,飞行器侧摆即让整个飞行器转一个角度,由飞行器的姿态调整来实现。这种方法要求飞行器具有较高的姿态控制性能和可靠性,且要消耗一部分飞行器燃料。对于相机来说侧摆成像时,地物与相机成像距离会随着侧摆发生变化,成像距离的变化不仅带来图像比例尺的改变,而且会造成相机焦平面上像移速度发生变化,使像移速度与TDICCD电荷转移速度不匹配,恶化成像质量[8]。同时,由于侧摆的存在,空间相机多片CCD的拼接处就会出现缝隙,由于缝隙的存在就会造成地面上某些目标的缺失,从而带来了获得的图像数据无法正常拼接的问题,使获得的目标信息不完整,影响空间相机的使用性能。因此对空间相机像面CCD拼接进行研究对于改善相机使用性是十分必要的。
在航天领域,目前采用多片CCD拼接及侧摆成像方面,国内外都进行了大量的尝试与探索,并把一些成果应用于工程实践当中。对于在侧摆成像时,采用多片CCD拼接成像会出现缝隙需要在拼接时重叠一定的像元数来解决问题的研究并不多见。本文分析了CCD推扫成像的工作原理和像移补偿残差对图像出现缝隙的原理,采用重叠像元的方法克服了图像缝隙的问题,并对满足空间相机成像质量要求的像面重叠像元数进行分析与计算。
1 克服图像出现缝隙的原理
线阵CCD推扫式相机的工作原理如图1所示。

图1 线阵CCD推扫工作模式
线阵CCD空间相机搭载于飞行器上,飞行器距地面的距离为轨道高H,CCD拼接像面通常与地面平行,也可以有一定的倾角(在飞行器侧摆时以增加地面覆盖宽度)。如果相机光学系统的焦距为f、像元几何尺寸为a,像面阵列的像元个数为N,可以得到地面覆盖宽度的表达式:
(1)
每一个像元所覆盖的地面宽度为相机的地面像元分辨率,其表达式为
(2)
通过公式(1)和(2)可以看出,地面像元分辨率和轨道高度根据任务要求事先已确定,相机焦距为相机固有参数,为了增加空间相机地面覆盖宽度,相机像面由多片CCD拼接而成。在拍摄过程中,飞行器轨道运动、地球自转和飞行器姿态变化会造成像点在焦平面上的相对运动,形成像移[9]。通常采用TDI-CCD时间延迟转移速率和合成矢量速度值相等,并调整飞行器运动方向与相机实际成像方向之间的夹角即偏流角来补偿像移。但由于飞行器的飞行速度、飞行高度、姿态变化、偏流角误差、安装误差以及相机本身控制误差等一系列误差,最终使CCD积分方向与像的移动方向不一致,造成像面上相邻的两片CCD的拼接处有缝隙,使拍摄后的图像不能正常拼接[10],如图2所示。

图2 图像出现缝隙原理分析图
为了解决CCD积分方向与像的移动方向的不一致所造成的像面上相邻两片CCD的拼接处有缝隙的问题,需要使相邻的两片CCD在行方向上重叠一定数量的像元,如图3所示。需要重叠的像元数n=tanβ×BC/a,β为CCD积分方向与像的移动方向的夹角,BC精确值由CCD芯片尺寸及机械安装尺寸确定。a为TDICCD像元尺寸。

图3 通过重叠像元来克服图像缝隙示意图
根据以上分析,要确定相邻的两片CCD在行方向上重叠像元数据,关键要确定β角,即CCD积分方向与像的移动方向的夹角。既要使相机满足地面覆盖宽度的要求,还要使像面上相邻两片CCD拼接处不出现缝隙,二者必须权衡考虑。
2 像元重叠数的计算
2.1β角的确定
计算CCD像元重叠数一定要先确定在成像过程中CCD积分方向与像的移动方向存在的夹角。这个夹角并不是通常所说的偏流角,而是偏流角中无法通过偏流机构补偿的部分。在拍摄过程中,产生CCD积分方向与像的移动方向的不一致有以下两方面:
1)由于偏流机构的约束:在一个时刻,像面只能按照一个角度值以及方向进行调整,但在像面上不同位置的偏流角都不相同,为了不使像面两边有太大的差异,因此在调整时只能以中心点位置的偏流角作为偏流机构的调整值,这将导致CCD拼接处像的移动方向与积分方向存在偏差(e1)。
2)偏流角的总误差:根据调制传递函数下降值能满足成像质量的要求,通过调制传递函数公式计算在使用的最高积分级数下允许的偏流角误差(e2)。
像移匹配残差而得出的调制传递函数值MTF[8]为:
(3)
其中:fc为特征频率,等于奈奎斯特频率fn;M为TDI-CCD的积分级数;VP为像移速度;ΔVP为像移速度残差。
2.2像面上各点像元重叠数据计算
相机在侧摆角最大,拍摄点位于赤道上时,像面上不同位置的偏流角相差最大。且在积分方向上偏流角值成单调变化。因此选取像面上以下9个点O、A、B、C、D、E、F、G、H进行分析,O、A、B、C、D、E、F、G、H如图4所示。

图4 像面上所选取点位置示意图
在图4中,当侧摆角最大为φ时,G点与O点偏流角差值最大,设需要重叠的最小像元数为x,在像面上以光轴中心为原点,O点和G点的坐标为(xO,0)和(xG,a×(k-x)),k为G点距离O点的像元数。将这两个点的位置代入像移速度矢计算模型中,计算偏流角值,从而得到G点与O点的偏流角差值,即e1。
O点的偏流角值作为偏流机构的调整值,因此沿G点像移速度与所选取的8点所在列的积分方向的夹角都不大于e1+e2;如果沿这个方向正好有像元,则能得到以下等式:
tan(e1+e2)×(xG-xO)=x·a
(4)
另外还要考虑到CCD芯片在安装时有一定的安装误差μ,因此需要对上式进行修正如下:
tan(e1+e2)×(xG-xO)+μ=x·a
(5)
在公式(5)中,e1、e2根据误差分析得出,xG、xO为像面位置,μ为安装误差,根据安装精度确定。从而可以计算的出重叠像元数x。
3 实验结果与分析
某相机像面由五块TDICCD拼接而成,每片CCD的总像元数为4 096,通过TDICCD拼接使拍摄的行像元数大于20 000个,对应地面覆盖宽度大于10 km。调制传递函数值下降5%对成像质量无本质影响,根据公式(3)计算得出在96级积分级数下允许的偏流角误差不大于12',由此确定偏流角的总误差e2。由于偏流机构的约束,侧摆角最大为15°时像面上各点与中心偏流角最大误差不超过1'。根据测量获得xG为108.735 mm,xO为73.535 mm,CCD安装误差μ为0.002 mm,CCD像元尺寸为0.008 75 mm。将以上数值代入公式(5)进行求解得出重叠像元数x=15.441 3。
像元重叠数应该为不小于x的整数,因此像元重叠数应大于15。
根据以上分析计算,在进行像面拼接时,相邻两片CCD之间的重叠像元数应大于15,在实际的设计中,考虑到偏流角误差12'有可能在相机工作过程中增大,在计算出的重叠像元数上加入一倍的余量;再考虑到结构的误差在拍摄过程中有可能变化,再加入8个像元的余量,这样也给CCD拼接带来了方便之处,降低了拼接难度,因此选取像元重叠数为40。当选取CCD像元重叠数为40时,TDICCD 拼接后总的像元数为20 320,对应的地面覆盖宽度为10.16 km,满足拍摄的行像元数大于20 000,地面覆盖宽度大于10 km的要求。
在轨道侧摆14.66°时,相机拍摄的原始图像和拼接后的图像如图5所示。
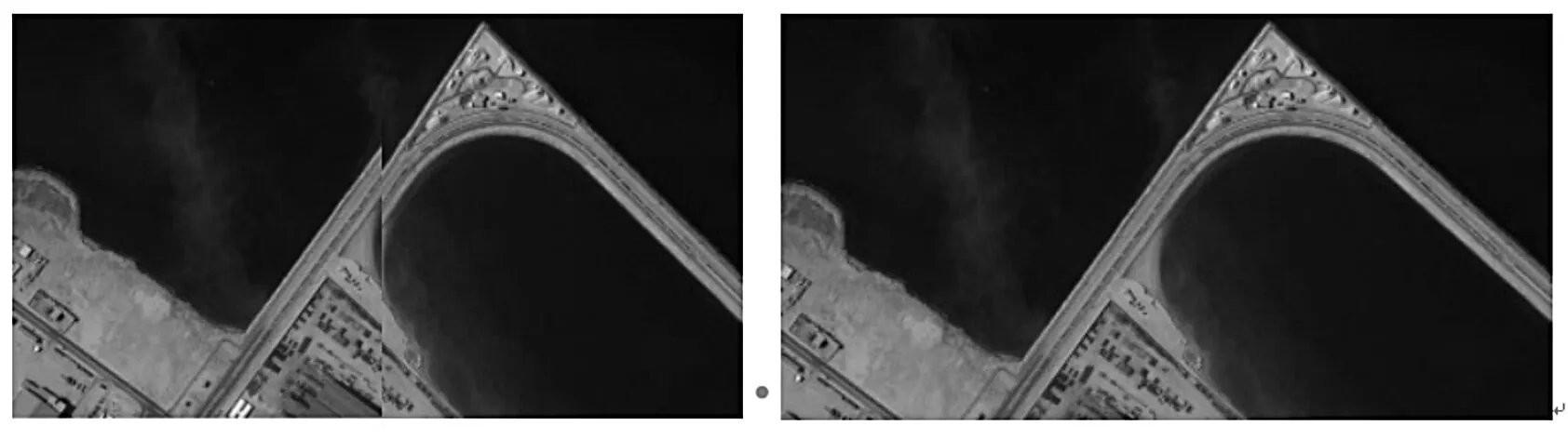
图5 原始图像和拼接图像
图中左图为相邻两片CCD获得的原始图像数据,右图为拼接后的图像数据。图像匹配结果为重叠像元数为25.58,与理论上计算基本一致。从而验证了计算方法的正确性。
4 结论
选取偏流角误差处于最大值时进行分析,且加入了CCD芯片安装的最大误差,计算出的重叠像元数是任意相邻两片CCD在拼接处像移速度与TDICCD列方向有最大的偏差时所需要重叠的像元个数为大于15。在实际设计中考虑CCD座之间的相互位置及用于固定CCD座的螺钉孔位的影响,则搭接时交错的像元数要留有一定像元的余量,从而能够完全解决像面上相邻两片CCD拼接处有缝隙,拍摄后的图像信息不完整且不能正常拼接的问题。通过实例分析,由于每片CCD总像元数为4 096,可以设定在40个像元,即占总像元数的0.98%。地面覆盖宽度降低80 m。通过TDICCD拼接使拍摄的行像元数为20 320个,对应地面覆盖宽度为10.16 km,满足地面覆盖宽度大于10 km的要求。对空间相机像面CCD拼接重叠像元数进行计算为空间相机像面机械拼接及相机整体能否满足指标要求提供设计依据。
[1] 李伟雄,闫得杰,徐抒岩,等.空间相机地心距误差修正[J].光学 精密工程,2012,20(5):1126-1133.
[2] 武星星,刘金国.应用地球椭球的三线阵立体测绘相机像移补偿[J].光学精密工程,2011,19(8):1794-1800.
[3] 张树青,丁亚林,李友一,等.斜视步进画幅遥感相机像移补偿方法研究[J].红外与激光工程,2008,37(3):501-505.
[4] 张凤英,刘文怡,杨慧,等.远程遥测姿态控制系统设计[J].计算机测量与控制,2015,23(1):102-105.
[5] 闫得杰,韩诚山,李伟雄.飞行器侧摆和前后摆及控制误差的优化设计[J].光学精密工程,2009,17(9):2224-2229.
[6] 杨秀彬,金光,张刘,等.卫星后摆补偿地速研究及成像仿真分析[J].宇航学报,2010,31(3):912-917.
[7] 翟林培,刘明,修吉宏.考虑飞机姿态角时倾斜航空相机像移速度计算[J]. 光学精密工程,2006,14(3):490-494.
[8] 樊超,李英才,易红伟.偏流角对TDI CCD相机像质的影响分析[J]. 光电工程,2007,34(9):70-73.
[9] 李伟雄,徐抒岩,闫得杰.影响空间相机偏流角估值误差的参数[J].红外与激光工程,2011,40(8):1530-1536.
[10] 闫得杰,徐抒岩,韩诚山.飞行器姿态对空间相机像移补偿的影响[J].光学精密工程,2008,16(11):2199-2203.
Analysis and Calculation of Overlapping Pixels of Assembly CCD Image Plane in Space Camera
Yan Dejie,Wu Weiping,Sun Tianyu
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun130033,China)
In order to avoid multi-chip CCD stitching the gap space camera side of the pendulum imaging,resulting in loss of part of the target information and the acquired image can not be normal splicing problems,according to the CCD push-broom imaging principle and image motion compensation residual image the principle of analysis,overlapping like element method to overcome the problem of image gap pixel is calculated according to the actual engineering requirements on the image plane overlap,the specific requirements of overlapping pixel. Instance of the calculated drift angle error is less than the allowed 96 points series 12'and the bias current institutions deviation 1'of a premise,like the surface of splicing overlap between adjacent two CCD pixel calculated value should be greater than 15,consider the error and the installation of multiple factors to increase the margin,overlaps the pixel number 40 to meet the ground to cover the requirements of the width to 10 km.This article proposed the method is simple and easy to implement,which is suitable for the research of image motion compensation of space camera.
space camera;overlapped pixels;patch image plane;image aperture
1671-4598(2016)04-0193-02DOI:10.16526/j.cnki.11-4762/tp.2016.04.056
TP273
A
2015-10-19;
2015-11-10。
闫得杰(1979-),女,吉林长春人,硕士,主要从事航天遥感器像移补偿、软件设计等方向的研究。
