飞机结构件动态变形测量技术研究
2016-10-31张建花
张建花,冀 芳,邹 强
(中国飞行试验研究院 测试所,西安 710089)
飞机结构件动态变形测量技术研究
张建花,冀芳,邹强
(中国飞行试验研究院 测试所,西安710089)
针对飞行试验中飞机结构件的动态变形测量问题,提出了一种基于图像的测量方法,对其中涉及的关键技术进行了研究;采用10参数模型非线性成像模型补偿摄像机系统误差,引入摄像机动态校准算法,使摄像机标校重投影误差小于0.03 pixel;采用编码标志作为测量标志,提高了图像自动识别和匹配效率;采用双像机交会测量计算测量标志位移变形量可达到0.15 mm/m;实验证明,该方法满足飞行试验中飞机结构件动态变形要求。
飞行试验;摄像机消抖;变形测量;编码标志
0 引言
某型飞机在空中高速飞行时,某结构件在闭合过程中可能会有少量的形变产生,对飞机安全性造成影响。在试飞测试阶段需要检验该结构件闭合时形变的大小和分布位置,给飞机设计改进和试飞包线扩展提供参考。高清影像具有分辨率高,影像清晰,便于高精度测量分析,并可以满足长时间监测的采集和记录。本文采用了高清影像测量检测飞机结构件的动态形变量,以两台摄像机交会测量,可以得到其视场范围内的标志点的三维坐标。以地面起飞前影像测量结果为基准,比对空中试飞过程中影像测量的特征点坐标变化,得到其变形量。
1 测量原理
1.1测量方案
采用两台分辨率为1 920×1 080@30 fps的高清摄像机(C1和C2)拍摄飞机结构件A和B接缝部位,由可接收外部时间信息的机载影像采集器接收机上GPS产生的IRIG-B码时间,控制摄像机的同步触发和采集,获取两台摄像机的同步图像。通过双像机交会测量原理,根据布设的测量标志的空间变化,测量形变位置和形变大小。摄像机C1和C2安装在梁架上,视场范围覆盖结构件接缝部位和部分飞机结构,测量范围大约2 m,如图1所示。
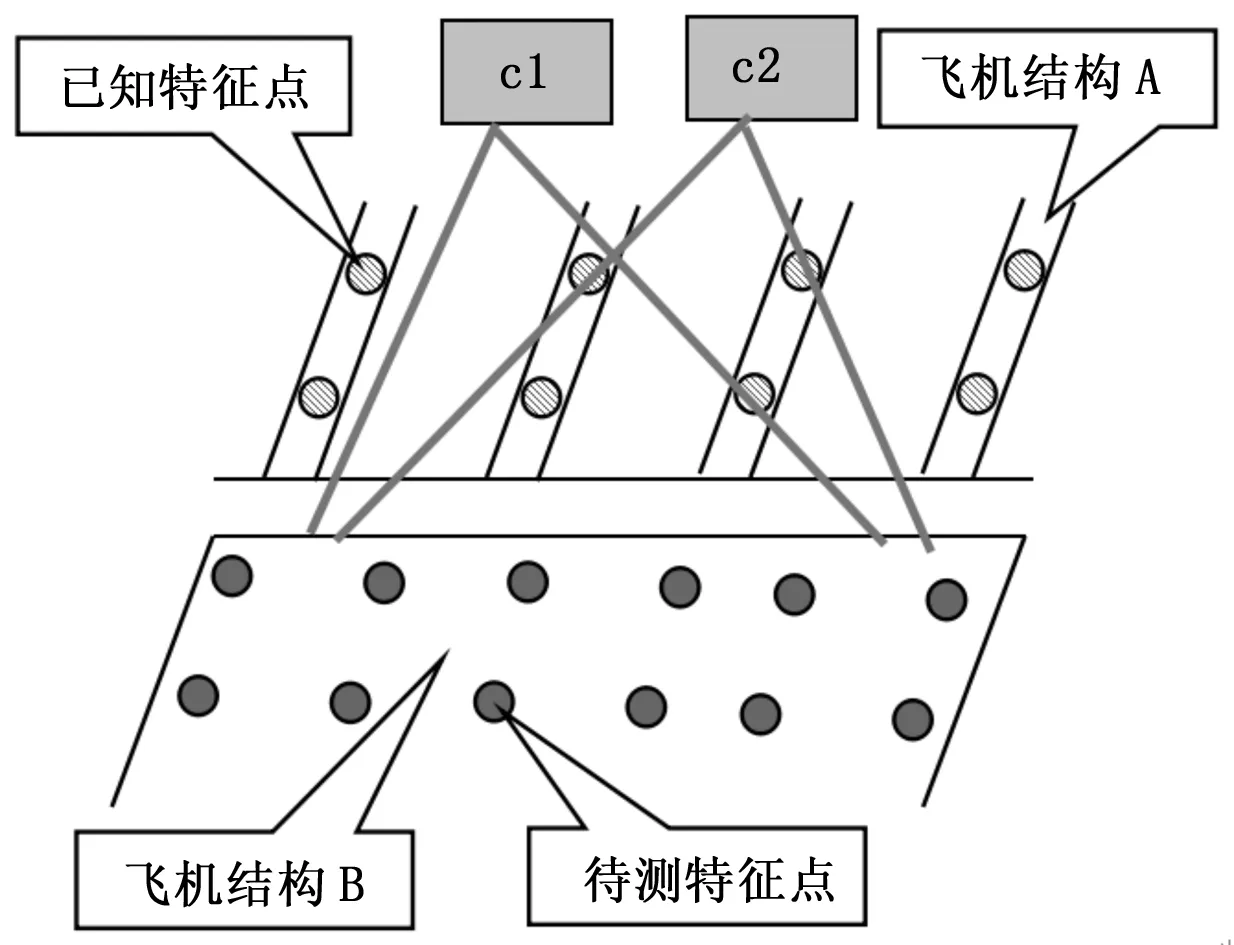
图1 影像测量示意图
飞行前,在地面飞机结构A和飞机结构B正常闭合,用C1和C2的影像测量其上各个待测点的空间坐标,作为变形的数据基准。空中试飞时,拍摄飞机结构A和飞机结构B闭后的影像,再次计算待测点的空间坐标,并与地面测量的基准数据进行比较,以得到变形的部位和变形量的大小。
1.2测量坐标系
采用飞机机体坐标系作为影像测量的空间基准。坐标系定义为三维直角坐标系,原点在飞机最前端,Y轴与飞机轴线平行指向机尾,X轴指向飞机的左侧,Z轴垂直YX平面指向上方,构成右手坐标系。
1.3测量标志点布设
在飞行状态下,虽然机身结构件在无规律振动,但机身局部刚性件整体的柔性变形相对于摄像机的刚性移动可忽略。在摄像机视场内寻找固定不变的区域作为变形测量的参考系统。设计两组测量参考点,一组称为动点,粘贴在飞机结构B上,和飞机结构B同步运动,用于计算飞机结构件B的变形;另一组称为不动点,认为其是不动,不变形的,粘贴在飞机结构A上作为测量的参考系,这组标志用于动态校准摄像机的空间位置和姿态,如图1分布所示。两组标志可以同时成像到同一个画面上。每一时刻的画面,先用不动点标志对摄像机进行校准,使摄像机的外参数回复其应有的位置。然后,根据当前的校准参数再对动点标志进行位置坐标解析计算。由此可消除或者减弱空中飞行状态摄像机抖动对测量结果的影响,提高动态变形测量精度。
1.4主要计算步骤
小学生在面临初次的习作时,常常会怀抱着很高的期待,希望自身的写作能力能够得到教师的认可,因此,教师在进行教学时,应该充分考虑到学生的心理,对学生的习作进行激励式评价,充分表扬习作中的优秀之处,鼓励学生发挥自身的创造力和想象力,通过习作抒发自身丰富的情感,增长自身的综合素养,提高自身的艺术水平,对于习作的缺点则在后续的教学中不断对学生进行指导,使学生能够逐渐得到进步,稳健提高习作水平。
飞机结构件动态变形测量技术主要包括标志点检测与识别、摄像机内方位元素标定、摄像机外方位元素标定、交会计算等步骤。具体如下:
1.4.1测量标志点识别
设计一组具有唯一编号编码标志,部分如图2所示。编码标志由内圆和外圆环两部分组成,其内圆是实心的圆,确定标志的中心位置;外圆环采用同心的环带,环带的长短和相互分布位置形成了编码。动点和不动点测量标志均采用不同编号的编码标志,这样便于标志点的自动识别,降低双像机测量特征点的误匹配。确定像点坐标的过程分三步: 首先,利用Canny算子提取图像边缘;然后,椭圆检测,用最小二乘法拟合出中心坐标;最后,对椭圆外围的环带进行检测,确定标志点的编号。大量实验表明,该算法提取的像点坐标精度优0.02 pixel[2]。

图2 编码测量标志
1.4.2摄像机内方位元素标定
在实验室对摄像机内方位元素进行标校。首先通过拍摄带编码标志的标校尺,根据10参数非线性模型[3]对摄像机的内方位参数进行标校,得到摄像机的焦距、像主点坐标、影像的畸变参数等。表1为C1,C2像机的内参数值:

表1 摄像机内参数值
1.4.3摄像机外方位元素标定
外方位元素在试飞中由于摄像机抖动原因会微量变化,需要利用飞机结构A上的基准测量标志对外参数进行动态校准。首先,用全站仪测量飞机结构A上的基准测量标志在飞机机体坐标系下的坐标。然后,判读试飞过程中每一帧图像上测量基准点的像素坐标值,通过摄影测量的单像空间后方交会原理,计算拍摄时刻摄像机的外方位参数。具体计算方法:
(1)
(2)

1.4.4双像机交会计算变形量
双像机交会的基本过程是根据已知的两台摄像机内、外方位元素参数以及被测物体影像测量特征点的图像位置,通过一定的数学计算得到影像测量特征点的几何位置。对式(1)进行变形,得到影像交会计算的公式如下:
(3)
其中:
l1=fa1+(x-x0+Δx)a3
l2=fb1+(x-x0+Δx)b3
l3=fc1+(x-x0+Δx)c3
l4=fa2+(y-y0+Δy)a3
l5=fb2+(y-y0+Δy)b3
l6=fc2+(y-y0+Δy)c3
lx=fa1XS+fb1YS+fc1ZS+(x-x0+Δx)a3XS+
ly=fa2XS+fb2YS+fc2ZS+(y-y0+Δy)a3XS+
根据结构B上的测量标志在左右两个影像上的1个同名点可以列出4个线性方程,通过最小二乘得到3个未知数(X,Y,Z)。由计算得到的Z坐标减去飞机在地面静止状态下测量得到的Z0,得到变化量ΔZ,即飞机结构件的形变量。
2 实验结果及分析
在如图3所示的实验装置上布设编码测量标志,模拟飞行过程中飞机结构件的闭合运动;并将摄像机加装在振动台上,模拟机载振动环境。拍摄静态及闭合过程中实验装置的图像,利用上述方法计算实验装置闭合前后的变形量。
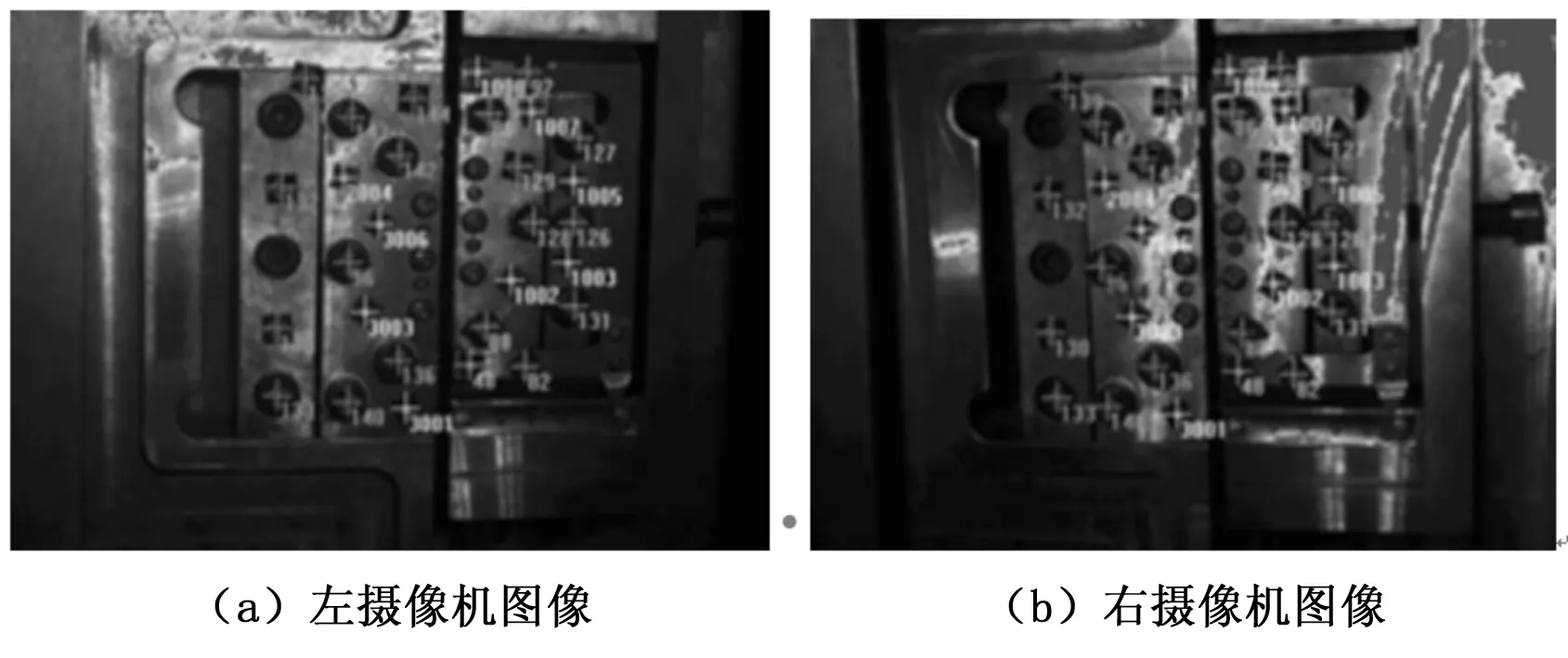
图3 左右摄像机拍摄的图像
对各个测量标志进行统计,抽取其中4个特征点,得到其变化的分布如图4所示。

Z/mm图4 实验装置形变测量数据
其变化的统计数据如下:
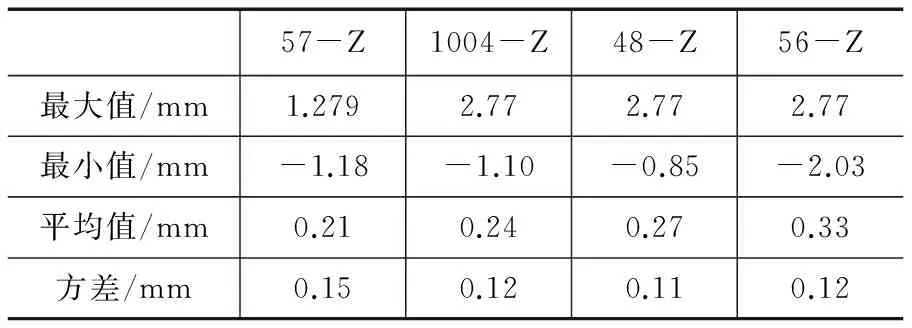
表2 形变测量数据统计
由于形变测量是相对测量,用测量值减去基准值,在实验装置紧闭仅有微量振动情况下,也同时降低了系统误差的影响,故此基准数据测量中ΔZi中没有过大的趋势性数据,基本在±0.15 mm以内,其相对精度可达到0.15 mm/m,小的波动可以认为是测量随机误差与结构件振动时的微量抖动引起的。
在实际飞行试验中,一路高清影像测量1小时产生10.8万
帧画面、208 GB的数据量,一个飞行架次多视角1~2小时的影像数据汇集在一起,堪称海量。人工判读10.8万帧画面需要300小时,精度只能到像素级。采用编码标志,并设计了影像处理软件,由软件自动识别影像中所有测量标志,再根据自动区分,达到了0.1像素的判读精度,2~3 fps的处理速度。但是处理10.8万帧画面仍需10小时。后续还需进一步加强影像的自动识别能力,提高影像数据处理的速度,实现复杂环境下影像数据的自动化快速处理。
3 结束语
采用两台高清摄像机对飞机结构件进行同步拍摄,利用立体摄影测量原理处理数据,解算飞机结构件的变形量,为飞机结构件动态条件下的变形检测提供了新的解决思路。该系统构建简单,精度高,可视化测量结果便于后续分析,给飞机设计改进和试飞包线扩展提供参考。
[1] Burner A W,Liu T S H. Videogrammetric model deformation measurement technique[J].Journal of Aircraft,2001,38(4):745-754.
[2] 胡浩,梁晋,唐正宗,等.大视场多像机视频测量系统的全局标定[J].光学精密工程,2012,20(2):369-378.
[3] 黄桂平. 数字近景摄影测量关键技术研究与应用[D]. 天津:天津大学,2005.
[4] 马扬飚,钟约先,戴小林.基于编码标志点的数码相机三维测量与重构[J].光学技术,2006,32(6):865-868.
[5] 张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2003.
[6] 冯文灏. 近景摄影测量——物体外形与运动状态的摄影法测定[M]. 武汉: 武汉大学出版社,2002.
[7] Tang Z T,Liang J,Xiao Z Z,et al. Three-dimensional digital image correlation system for deformation measurement in experimental mechanics[J]. Optical Eengineering,2010,49 (10): 103601.
[8] Xiao Z Z,Liang J,Yu D H ,et al. An accurate stereo vision system using cross-shaped target self-calibration method based on photogrammetry[J]. Optics and Lasers in Engineering,2010,48 (12): 1252-1261.
Research on Aircraft Structure Dynamic Deformation Measuring Technology
Zhang Jianhua,Ji Fang,Zou Qiang
( Department of Test,China- Flight Test Establishment,Xi′an710089,China)
In order to solve the problem of dynamic deformation measurement for aircraft structural parts in flight test,a method based on image is presented,and the key technologies involved are studied. 10-parameter model and the dynamic camera calibration algorithm are adopted to compensate the camera system error. After that the camera calibration re-projection error is less than 0.03 pixel.Using Coded marks as the surveying marks,the efficiency of image automatic recognition and matching are improved. The measurement accuracy of key points deformation is 0.05 mm/m using intersection measurement. The experiment results show that the proposed method in this paper can satisfy the demands for aircraft structural parts dynamic deformation measuring in flight test.
flight test; camera debounce; deformation measurement; coded mark
1671-4598(2016)04-0007-03DOI:10.16526/j.cnki.11-4762/tp.2016.04.002
TP391
A
2015-09-23;
2015-10-18。
张建花(1983-),女,陕西商洛人,硕士研究生,主要从事机载影像测量方向的研究。
